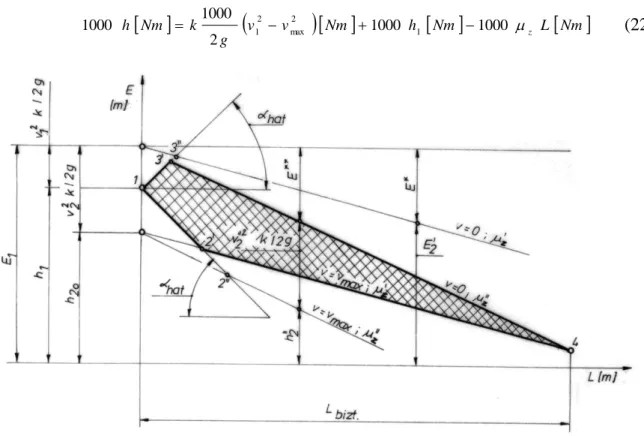
Tartalomjegyzék
0. BEVEZETÉS ... 7
1. ANYAGMOZGATÓGÉPEK ÁLTALÁNOS MOZGÁSEGYENLETEI ... 9
1.1. Adott mozgásállapot megvalósításához szükséges energia ... 10
1.2. Mozgásállapot meghatározása adott energiaforrás alapján ... 15
2. KÉNYSZERPÁLYÁN VALÓ ANYAGMOZGATÁS ÉS BERENDEZÉSEI ... 21
2.1. Csúszdák ... 21
2.2. Csavarpályás csúszda ... 24
2.2.1. Stacionárius sebességállapot ... 24
2.2.2. Adagolás csavarpályás csúszdára ... 27
2.3. Görgősorok ... 29
2.3.1. Gravitációs görgősorok ... 29
2.3.2. Hajtott görgősorok ... 45
2.3.3. Különleges görgősori elemek ... 47
3. SZAKASZOS ANYAGMOZGATÓGÉPEK ... 50
3.1. A szakaszos anyagmozgatás jellemzői ... 50
3.2. Daruk csoportbesorolása ... 53
3.3. Daruk szerkesztési és méretezési kérdései ... 53
3.3.1. Villamos emelődob ... 53
3.3.2. Futódaruk ... 67
3.3.3. Daruhidak mozgásgeometriája ... 84
3.3.4. Könnyűszerkezetű futódaruk ... 116
3.3.5. Markoló üzemű daruk ... 117
3.3.6. Bakdaruk ... 119
3.3.7. Függődaruk ... 121
3.3.8. Daruk túlterhelés elleni védelme ... 123
3.4. Függősínpályás anyagmozgató rendszerek ... 124
3.4.1. Rendszertechnikai felépítés ... 124
3.4.2. Függősínpályás berendezések kocsiszerkezetei ... 126
3.4.3. Pályaelemek ... 129
3.4.4. Függősínpálya rendszerek automatizálása ... 133
3.5. Szakaszos mozgóasztalok ... 134
3.6. Raktári felrakógépek ... 136
3.7. Targoncák ... 144
3.7.1. A targoncák csoportosítása és felépítése ... 145
3.7.2. Targoncák stabilitása ... 157
3.7.3. Targoncák közlekedési útvonalai ... 158
3.8. Vezetőnélküli targoncák ... 161
3.8.1. A vezetőnélküli targoncák típusai és felépítése ... 162
3.8.2. Nyomvezetés technikák ... 164
3.8.3. Kormányzási elvek ... 169
3.8.4. Vezetőnélküli targoncás rendszerek felépítése ... 171
3.8.5. Vezetőnélküli targoncák útvonalainak kialakítása ... 175
3.8.6. Egységrakományok fogadása ... 179
3.8.7. Vezetőnélküli targoncák irányítása ... 182
3.9. Felvonók és mozgólépcsők ... 189
3.9.1. Felvonók és mozgólépcsők hajtásának elemei ... 191
3.9.2. Felvonók szerkezeti egységei ... 194
4. IRODALOM ... 198
0. BEVEZETÉS
A gyártási folyamatok automatizálása eddig főként a megmunkálógépek automatizálá- sára terjedt ki. Így ezek minőségi fejlődésével a termelékenység elért egy bizonyos szintet, amelyet újra növelni csak a folyamatokban résztvevő kiszolgálógépek (anyagmozgatógépek) automatizálásával, illetőleg magának a teljes gyártási folyamatnak az optimálissá tételével tudunk.
E problémának különös jelentősége van a kis-és középsorozat gyártás automatizálásá- ban. A kérdés itt mindenképpen rendszer problémaként jelenik meg. A terméket részben, vagy egészében előállító egység tekinthető rendszerként (vagy egy nagyobb rendszer részrendsze- reként), amelynek elemei között vagy csak információs, vagy információs és fizikai kapcsola- tok vannak. A fizikai kapcsolat az anyagáramlás. Ez a kapcsolat teszi lehetővé - megfelelő berendezések alkalmazása esetén – a rendszer automatikus irányítását. Megfelelő berendezés alatt az alakító technológiák gépeinek, az anyagmozgatógépeknek, a szerelőgépeknek megfe- lelően automatizált típusait kell érteni.
A rendszer elemek fizikai kapcsolata folyamatos vagy diszkrét (szakaszos) folyamato- kat hoz létre, amelyek működése – megfelelő információk birtokában – előre tervezhető és modellezhető. A leírtakból is látható, hogy a rendszer probléma két helyen is kapcsolódik az anyagmozgatáshoz, egyrészt a folyamatok, másrészt pedig az anyagmozgatógépek oldaláról.
Az automatizált folyamatok kialakítása a tervezőket új berendezések kifejlesztésére és a hagyományos anyagmozgatógépek korszerűsítésére, automatizálhatóságának megvalósítására késztette.
Ugyancsak a hagyományos szemlélettől való eltérést követel az ipari csarnokszerkeze- tek korszerű könnyűszerkezetes kivitele is (pl. a darutervezésben a célorientált könnyű kivite- lű darutípusok kialakítása).
Az anyagmozgatógépek tervezése egy összetett problémakör, ilyenkor sokrétű kérdés- csoportot kell megvizsgálni;
― acélszerkezeti,
― szilárdságtani,
― dinamikai,
― gépszerkesztési,
― speciális anyagmozgatási,
― automatizálási,
― informatikai problémákat.
A tankönyv az Új Széchenyi Terv TÁMOP-4.1.2/A/2-10/1-2010-0018 számú program- ja, „Egységesített jármű- és mobilgépek képzés- és tananyagfejlesztés” projekt keretében ké- szült. A könyv anyagának alapját a Budapesti Műszaki és Gazdaságtudományi Egyetemen, Anyagmozagtógépek címmel tartott előadásaim, illetve e téren végzett kutatásaim képezik. Az előadások időterjedelme sok lényeges elméleti és gyakorlati tananyagrész tárgyalását nem tette lehetővé, azóta olyan új kutatási és fejlesztési eredmények születtek és kerültek nyilvá- nosságra, amelyek ismeretét a 21. század mérnöke nem nélkülözheti. Tartalmilag könyv a BME Közlekedésmérnöki és Járműmérnöki Karán a Járműmérnöki BSc alapszak Automati- zált anyagmozgató berendezések és robotok szakirány hallgatóinak tananyagát foglalja össze.
Az anyag összeállításánál részben a konstruktőri szempontokat, részben pedig a berendezések üzemeltetési, gépkiválasztási szempontjait és az anyagmozgatási-, logisztikai folyamatok ösz- szeállításával kapcsolatos kérdéseket részesítettem előnyben. A tankönyv két kötetben ké- szült, az első kötet az általános anyagmozgatási elveket, egyenleteket, a gravitációs anyag-
mozgatás eszközeit, a szakaszos anyagmozgató berendezéseket tartalmazza. Ezen belül ki- emelt szerepet szán az automatizált gyártási folyamatokat és a járműipari technológiai folya- matokat kiszolgáló, a logisztikai rendszerek fizikai bázisát képező automatizált anyagmozgató berendezéseknek. A második kötet a legfontosabb folyamatos anyagmozgató berendezéseket tárgyalja.
Köszönettel tartozom a könyv bírálójának lelkiismeretes munkájáért és hasznos tanácsa- iért. Külön köszönettel tartozom Némethy Zoltán adjunktus úrnak, felvonószakértőnek, aki a Felvonók és mozgólépcsők fejezet megírásával a tankönyvet teljessé tette.
A könyv megalapozza a szakterületen végzendő MSc tanulmányokat. Kívánom, hogy a hallgatóság és a gyakorlatban dolgozó mérnökök haszonnal forgassák a könyvet.
Budapest, 2012. február
Dr. Kulcsár Béla
1. ANYAGMOZGATÓGÉPEK ÁLTALÁNOS MOZGÁSEGYENLETEI
Anyagmozgató berendezések feladata, meghatározott súlyú anyagot a tér kijelölt
1 1 1
1 x ; y ;z
P pontjáról, mint feladóhelyről egy másik P 2 x2; y2;z2 helyre továbbítani meghatározott idő alatt. Az elvégzendő anyagmozgatási feladat megoldása során számos mechanikai problémával találkozunk, amelyek főként a kinematika, a kinetika és a szilárdság- tan területére vezetnek. Mind a tervezés, mind az üzemeltetés részére ismerni kell az anyag- mozgatás minden fázisában a fellépő erőhatásokat. Ehhez azonban előzetesen meg kell hatá- rozni a sebességek és gyorsulások értékeit, meg kell határozni a berendezés mozgásegyenletét vagy mozgásegyenleteit. Ezen paraméterek ismeretében számíthatjuk a berendezés szállítóké- pességét (teljesítőképességét), hajtó- és fékező-berendezéseinek teljesítményét és energia- felvételét.
Egy általánosított anyagmozgatási probléma az 1. ábra szerint értelmezhető. Ez alapján a P1 és P2pontok közötti legrövidebb anyagmozgatási útvonal.
2 12 2 12 2 12
min x x y y z z
s ,
amely H z2 z1 h2 h1 emelési magasságra és L x2 x12 y2 y12 vízszintes távolságra bontható. A H út megtétele – attól függően, hogy H > 0 vagy H < 0 – az anyag- mozgatási feladat emelési, illetve süllyesztési funkciója, míg az L út megtétele a szállítási funkció. E két funkció együttes jelenléte nem szükséges valamennyi anyagmozgatási feladat- hoz, így L = 0 esetén függőleges szállításról, H = 0 esetén pedig szintes szállításról beszélünk.
Anyagmozgatógépek tervezésekor egyik legfontosabb vizsgálati eljárás a gép mozgásál- lapotára vonatkozik. A feladat megoldása két oldalról közelíthető:
- Ismert – az 1. ábra általánosított modelljét tekintve – a kérdéses anyagmozgató- berendezés energiaforrása (hajtóerő) vagy energia elnyelése F, terhelése G , és vesz- teségei R , meghatározandó a mozgásállapota (út-idő, sebesség-idő és gyorsulás-idő függvények).
- Az adott mozgásállapot (menetelőírás) megvalósításához milyen energia szükséges?
1. ábra
1.1. Adott mozgásállapot megvalósításához szükséges energia
Az 1. ábra térbeli szállítási útvonalát egyszerűsítsük a 2. ábra szerinti síkbelivé. Ebben az általánosnak tekinthető esetben a v sebességgel mozgó testre a G súlyerőn kívül a külső passzív erők (pályaellenállások, pályaerők, súrlódások stb.), amelyek eredője F, hatnak.
2. ábra Impulzus tételt felírva a mozgó testre
a m dt
v m d R G
F , (1) ahol a mechanika tanítása szerint
t v at ann a e dt
e vd dt edv v e dt
d dt
v
a d
2
, (2)
a pálya görbületi sugara,
n pedig a görbületi középpontba mutató egységvektor. Az (1) egyenlet átrendezésével a hajtóerő (fékezőerő)R G a m
F (3) alakban fejezhető ki, amelyből a helyváltoztatáshoz szükséges energia a teljesítmény időinteg- ráljaként számítható:
P dt F v dt m av dt G v dt R v dt
E . (4)
A v v e kifejezéssel (4) egyenlet
P dt v F edt m v a e dt vG e dt v R edt
E (5)
alakba írható át. A 2. ábra jelöléseit figyelembe véve végezzük el az e egységvektorral való skaláris szorzást, ekkor
Z R
e R
G G
e G
dt a dv a
e a
F F
e F
t t
cos
sin cos
cos cos
(6)
összefüggések adódnak, amelyeket (5)-be behelyettesítve és a ds = v dt jelölést bevezetve
v
v
s h
h
t ds m v dv G dh Z ds
F dt P E
1 1
. (7) A jobboldali integrál két tagja könnyen kiszámítható, a harmadik csak bizonyos egysze- rűsítések és feltételezések mellett, mert a Z = Z (s) függvény ilyenkor analitikus formában előállítható. Elvégezve (7) integrálását
P dt m v v G h h sZ ds E
1 2
1 2
2
1 (8)
adódik, amely a mozgásállapothoz hozzárendeli az energiát. Az aktív erők munkája tehát a G
súlyú test potenciális és kinetikai energiájának változását és az ellenállások legyőzésére fordí- tott munkát fedezi.
Szállítóberendezések esetén a Z = Z (s) meghatározásához feltételként szabható, hogy
e a a e F
F t , t . Ebből következik, hogy a pályanyomás N G sin G cos . A me- netellenállás tényezőjét ismertnek véve a pálya menti ellenállás:
s N
Z z , (9) illetve a munkája
s s
z G ds
ds s Z
cos . (10)
A 2. ábra alapján értelmezett d ds cos helyettesítéssel
s
z
z G d GL
ds s Z
2
1
. (11)
Így az előbb tett feltételezések esetén az
P dt m v v G h h GL
E 2 12 1 z
2
1 (12) összefüggést kapjuk energiaegyenletként.
Példa: A 3. ábra szerinti emelőmű adott mozgásállapotának megvalósításához szükséges energia meghatározása
Az emelőberendezés mozgásciklusa gyorsító, állandó sebességű és lassító szakaszokból tevődik össze, foronómiai görbéit a 4. ábra mutatja. Az összetett rendszert – mivel a szerkeze- ti elemeit merevnek, a kötélrendszerét pedig teljesen hajlékonynak és nyújthatatlannak téte- lezzük fel – a rendszer bármelyik pontjára, tömegpontként vagy forgó tömegként redukálhat- juk. A redukálás alapja az összetett és az egyszerű redukált rendszer kinetikai energiájának azonossága. Az összetett rendszer kinetikai energiája:
2 2
2 2
2 1 2
1 2
1 2
1
m m m
f d d e
ö mv J J J
T .
Az egyszerű rendszert az emelendő teher helyén működtetve, kinetikus energiája:
2
2 1
e R
e m v
T .
Q m
Kötéldob Hajtómû
Fék Motor Tengelyk apcsoló
Teher Kötél
v a
t t i
H
Jm Jf
Jd
3. ábra
v
a
t
t t s
He
t1
t2 t
3 v = conste
v (t - t ) e 2 1 1
2 v te 1
1 2
v te 1
4. ábra Az ábra alapján könnyen belátható, hogy az emelési sebesség
H m
e i
R
v
, amellyel az
mR redukált tömeg:
2 2
2 2
2 R
i J R
i J R m J
mR d f H m H . A teher mozgatásához szükséges energia
Az 5. ábra vázlata alapján, most már egyszerűsített (redukált) rendszerre írjuk fel az (1) szerinti impulzus tételt:
a m F Q
F s R
,
amelyből átrendezéssel;
s
R a Q F
m F
.
F
v Q
F = s M is H
R mR
5. ábra
Képezzük a mozgáshoz szükséges energiát a teljesítmény időintegráljaként:
Fvdt
mR a vdt
Qvdt
Fs vdt ,mivel a vektorok párhuzamosak, az integrandusba a skalár szorzatuk is írható:
2
1
3
2 1
0
t
t
t
t t
dt v F dt v F dt v F dt v F dt v F
,
3
2 1
0
0
t
t R t
R R
R a vdt m a vdt m a vdt m a vdt
m
,
2
1
3
2 1
0
t
t
t
t s s
t
s s
s v dt F v dt F v dt F v dt F v dt
F
,
2
1
3
2 1
0
t
t
t
t t
dt v Q dt v Q dt v Q dt
v Q dt
v Q
. Az integrálok kiszámítása:
[0 – t1] intervallum:
dt
v ds , t
t v ve
1
és
t1
v dt
a dv e .
Az energiát a teljesítmény időintegráljaként felírva a fenti értelmezések figyelembevéte- lével:
1 1 1 1
0 0 0 1 0 1 0 1 0
1
t t t t
e s v
R e
s e
v
R t dt
t F v Q dv v m dt t t F v dt t t Q v dv v m dt v F E
e e
, amelyből az integrálás elvégzésével a gyorsítási szakasz energia igényére
2 2
1 2
1
t F v v Q
E mR e s e
adódik. A gyorsítási szakaszban szükséges teljesítményt az energiából
2 2
)
; 0 (
1 2
1 1 1
e s e
R v
F Q t
v m t t E
P
összefüggéssel lehet meghatározni.
[t1 – t2] intervallum: v ve const , és a 0.
Az időintervallum kinematikai jellemzői alapján az állandó sebességű mozgáshoz szük- séges energia:
2
1
2
1
2
1
2
1 2
t
t
t
t
t
t
t
t e s e
s
e dt F v dt Q F v dt
v Q dt v F
E ,
illetve az integrálás elvégzésével
2 1
2 Q F v t t
E s e
alakba írható. Az állandó sebességű mozgás teljesítmény igénye:
Q Fsve t
t t E t
P
1 2
2 2
1; )
( .
[t2 – t3] intervallum:
dt
v ds , t t
t t
v ve
3
2 3
és
2
3 t
t v dt
a dv e
.
A lassuló szakaszban szükséges energia:
3
2
3
2
3
2
3 2 3 3
2 3 0
3 t
t
t
t
t
t e s e
v
R t t dt
t t F v dt t t t t Q v dv v m dt v F E
e
, a második és a harmadik tag összevonásával:
3
2 3 2 3 0
3
t
t e s v
R t t dt
t t F v Q dv v m E
e
.
Elvégezve az integrálást a lassuló szakasz energia szükséglete:
3 2
2
3 2 2
t v t
F v Q
E mR e s e ,
teljesítményigénye pedig:
2 2
)
; (
2 3
2
2 3
3 3
2
e s e
R v
F Q t
t v m t
t t E t
P
.
Az előírt mozgástörvény megvalósításához szükséges teljesítmény diagramot a 6. ábra mutatja.
mR ev 2 2 t 1
+ ve
2
(Q + F )s
mR ev 2 2 (t - t )
3 2 +
ve 2
(Q + F ) - s
ve (Q + F )s P
t t
1 t
2 t
3
6. ábra
Az ábrán látható, hogy a lassulási szakaszban negatív teljesítmény jelenik meg. Ez azt jelenti, hogy mozgás e szakaszában energia elvonás történik, amely mechanikus fékezés ese- tén hővé alakul, villamos (ellenáramú) fékezés esetén pedig energia visszatáplálás történik a hálózatra.
1.2. Mozgásállapot meghatározása adott energiaforrás alapján
Szorozzuk meg (1) egyenletet az eegységvektorral és a kapott pálya menti ellenállás legyen Z s z G cos , ekkor
sin z cos
t
t F G
a m dt
m dv (13) mozgásegyenletet kapjuk. Ez az egyenlet alkalmas a mozgásállapot meghatározására.
Anyagmozgatógépeken végzendő vizsgálathoz (pl. indítás és fékezés), (13) helyett gyakorta annak forgómozgásokra érvényes formája (perdülettétel) szükséges;
. ell terhel ő
R
R J M M M
dt
J d
. (14) Bonyolultabb, több egymással kapcsolódó részből álló berendezés mozgásegyenletének felírása is gyakran bonyolult feladat, ilyenkor a Lagrange-féle másodfajú egyenleteket alkal- mazzuk:
i i i
Q q
T q
T dt
d
i 1,...n . (15) Példa: Egy daruhídhajtás (7. ábra) adott energiaforrás alapján megvalósuló mozgásállapotá-
nak meghatározása
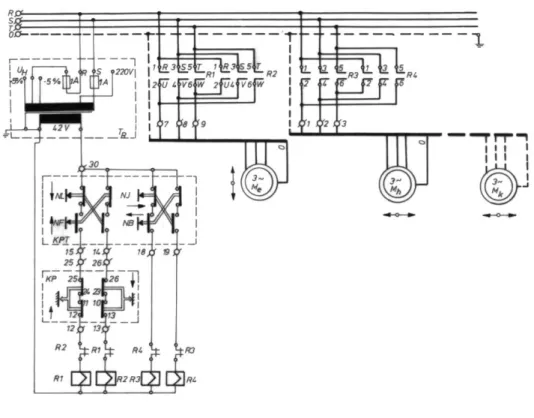
A vizsgálatainkat a 7. ábra daruhídhajtás modelljén végezzük el. Tételezzük fel, hogy az 1.1. pont alapján meghatároztuk az előírt mozgásállapot megvalósításához szükséges teljesít- ményt és energiaforrást, ennek alapján kiválasztjuk a megfelelő hajtóegységet, – pl. villamos motort – amely a 8. ábra szerinti karakterisztikával rendelkezik (csúszógyűrűs háromfázisú motor).
l
Tengelykapcsoló F
i H f
Közlõmûtengely
Kerékszekrény Motor
Fék
Futókerék (4 db ) Rk
7. ábra
n M
Mi
1 o
3 2
n
M n
8. ábra A hajtómotor jelleggörbéje az alábbi összefüggések segítségével írható le:
0 i 1
M
M 0 3,
3 0
1 3
M i
M 3 2,
2 0
1 2
Mi
M 2 1,
1 0
1 1
Mi
M 1 0.
Az egyszerűbb számítás kedvéért, redukáljuk a daruhidat a hajtómotor tengelyére. A da- ruhíd kinetikus energiája:
2 2
2 2
2 1 2
4 1 2
1 2
1
h d k
k m
f m
m
ö J J J m v
T
,
ahol md a daru tömege, Jm a motor, Jf a féktárcsa, Jk a futókerék tehetetlenségi nyomaté- ka, m, k a megfelelő elemek szögsebessége, vh a daru sebessége. A vh Rk k és
H m
k i
(iH a hajtómű áttétele) felhasználásával,
2 2 2
2 2
2 1 2
4 1 2
1 2
1
k k d k
k m
f m
m
ö J J J m R
T
.
A motor tengelyére redukált egyszerű rendszer kinetikus energiája:
2
2 1
m R
e J
T ,
a két rendszer kinetikus energiájának egyenlőségéből a motor tengelyére redukált tehetetlen- ségi nyomaték:
2 2
4 2
H k d H
k f
m
R i
m R i J J
J
J .
A redukált rendszert a 9. ábra mutatja a ható erők és a kinematikai jellemzők feltünteté- sével.
M
Mt
Ms J
R
9. ábra
Az ábrán vázolt jelölések közül az Mt terhelőnyomaték a daru menetellenállása;
H k d z
t i
g R m
M ,
az Ms csapágysúrlódási (veszteség) nyomaték pedig a terhelő nyomatékból egy veszteségi tényező alapján határozható meg az Ms Mt összefüggéssel. A mozgás vizsgálatához ír- junk fel a redukált rendszerre egy perdülettételt;
t 1
s t
R M M M M M
dt
J d ,
amelyből
R t
J M M dt
d
1
differenciálegyenlet adódik, amelyet az indítás és a fékezés fázisára is megoldunk.
Indítás fázisa
0 3 szögsebesség intervallum; Az első fázisra érvényes nyomaték összefüggést a differenciálegyenletbe helyettesítve:
1
0 R
t
R i
R i
J M J
M J
M dt
d ,
amelyet rendezve:
R t i
R i
J M M J
M dt
d
1
0
.
Jelöljük
0
R i
J
M és a differenciál egyenlet megoldást keressük et alakban. A homogén egyenlet általános megoldása a fentiek alapján
t
J A M
o R
i
h exp ,
a partikuláris megoldás pedig kereshető konstansként
i t i
p M
M
C M
1
0 .
A differenciálegyenlet általános megoldása:
C t J A M
R i p
h
0
exp ,
az állandókra a t 0; 0 kezdeti feltételekből
i t i
M M C M
A
1
0
adódik, amellyel a szögsebesség idő függvény:
t
J M M
M M
R i
i t i
0
0 1 1 exp
.
2
3
szögsebesség intervallum; A második fázis nyomaték függvényének al- kalmazásával a differenciálegyenlet
1
3 0 3
0 3
R t
R i
R i
R i
J M J
M J
M J
M dt
d ,
amelynek megoldása az előző elvek alkalmazásával:
t
J M M
M M
R i i
t i
3 0 3
0 3
3
0 1 exp
1 1
.
1
2
szögsebesség intervallum; A nyomaték függvény behelyettesítésével a dif- ferenciálegyenlet és megoldása:
1
2 0 2
0 2
R t
R i
R i
R i
J M J
M J
M J
M dt
d ,
t
J M M
M M
R i
i
t i
2 0 2
0 2
2
0 1 exp
1 1
.
0
1
szögsebesség intervallum; A differenciálegyenlet és megoldása az előzőekkel analóg módon:
1
2 0 2
0 2
R t R
i R
i R
i
J M J
M J
M J
M dt
d ,
t
J M M
M M
R i
i t i
1 0 1
0 1
1
0 1 exp
1 1
. Fékezés fázisa
A daruhíd megállításához a hajtónyomaték helyett fékező nyomatékot kell működtetni a féktárcsán. A számítást itt is a redukált rendszeren végezzük. A redukált rendszert a működő dinamikai jellemzőkkel együtt a 10. ábra, a fékező nyomaték idő függvényét pedig a 11. ábra mutatja.
Mt
Ms J
R Mf
10. ábra
t Mf
M = const f
11. ábra
A redukált rendszerre – 10. ábra – a perdülettételt felírva:
t 1
f
R M M
dt
J d ,
amelyből
R t f
J M M dt
d
1
differenciálegyenlet adódik. A változók szétválasztásával a differenciálegyenlet megoldása:
dt J
M M d
t
R t f
n
0
0 1
, illetve a szögsebesség-idő függvény pedig:
t J
M M
R t f n
1
.
Az indítási és a fékezési folyamat idő függvényét a 12. ábra mutatja. Az ábra alapján elemezhető, hogy az anyagmozgató berendezésre előírt mozgásállapot milyen pontossággal valósítható meg. Nagy eltérések esetén iteratív számítások szükségesek.
3
2
1
o
t3t 2t
1
(t = 0) t
v = i R
d H
k
n
12. ábra