ContentslistsavailableatScienceDirect
Computers and Chemical Engineering
journalhomepage:www.elsevier.com/locate/compchemeng
NMPC-based control scheme for a semi-batch reactor under parameter uncertainty
Alex Kummer
∗, Lajos Nagy , Tamás Varga
Institute of Chemical and Process Engineering, University of Pannonia, Veszprém H-8200, Hungary
a rt i c l e i n f o
Article history:
Received 9 April 2020 Revised 4 June 2020 Accepted 27 June 2020 Available online 30 June 2020 Keywords:
Multi-Stage NMPc Worst case scenario Runaway criterion Process safety Parameter identification
a b s t r a c t
ExothermicreactionsareoftenperformedinSBRbecausethegeneratedreactionheatcanbemoreeasily keptundercontrolinsuchconstruction.However,anunsuitablecontrolsystemcanleadtothedevelop- mentofthermal runaway,whichmaycauselethaldamage.NMPCwithimplementedthermalrunaway criteriaisapromisingtooltooperateSBRs.However,engineersshouldalwaysconsiderplant-modelmis- matchbecauseuncertainpredictionscancauseundesirablescenarios.Anovelcontrolframeworkispro- posedtooperateSBRsandconsistsofNMPCwiththeimplementedrunawaycriterion,extendedKalman filterandparameteridentificationalgorithm.BothMulti-StageNMPCandNMPCwiththeworst-casesce- narioareinvestigatedandtestedintermsofabilitytohandleparameteruncertainty.Theformeris38 timesslowerthanthelatterwithnonoticeableincreaseinreactorperformance.NMPCinitializedbased onthe worst-casescenario withupdating uncertainkineticparameters results inapromising control structureforSBRs.
© 2020TheAuthors.PublishedbyElsevierLtd.
ThisisanopenaccessarticleundertheCCBY-NC-NDlicense.
(http://creativecommons.org/licenses/by-nc-nd/4.0/)
1. Introduction
Semi-batch reactors (SBRs) are widely applied for highly exothermic chemical reactions so operators canmore easily keep the reactions under control. If one of the reagents is slowly fed to the other component(s), which is already in the reactor, the feedrateofreagentsaffects theheatevolution, soitcan be con- trolled, anda suitable coolingsystemcan bedesignedto remove the evolvingreactionheat (WesterterpandMolga, 2004). Forex- ample,theoxidationof2-octanolwithnitricacid(vanWoezikand Westerterp, 2000), Williams-Otto process (Rossi et al., 2016) and synthesis of lithium-etinolate are performed in semi-batch reac- tors.
The designof thereactor structurewithall necessary compo- nentsandthedesignoftheoperatingstrategyshouldbebasedon themathematicalmodeloftheproposedsystem. Thefeedingtra- jectories are generallyquite simpleusing a constant feeding rate over theentireprocess.Based ontheinitial conditionsandprop- ertiesofthereactorsystem, safeoperatingparameters canbede- finedwithaconstantfeedingratebycalculatingasafetyboundary diagram(Zhangetal.,2019).Aconstantfeedingratecanresultina
∗ Corresponding author.
E-mail address: kummera@fmt.uni-pannon.hu (A. Kummer).
higherbatchtimethanavaryingfeedingrateduringtheoperation.
However,theconstantfeedingrateisnecessarytokeepthesystem inthesafeoperatingregimeifourinformationabouttherealpro- cessescontainsuncertainties,whichwedonotaddressduringthe operation.
Moreover, engineers should always plan forplant-model mis- match, since it is difficult to obtain a model that describes the plantwithsufficientaccuracy. Theplant-model mismatchcan re- sultinan undesirableeventduringtheoperation,anditspreven- tionisnecessary.Manymethodscanbefound intheliterature to handlethisproblem, suchasconsideringuncertainparameters or applyingstate observers.ModelPredictiveControl(MPC)canpro- videarobust controlapproachtohandleuncertaintiesofthesys- tem,wherethefeedingratecanbeoptimized.MPCisanadvanced control systemand can handlesystem boundaries(Rawlingsand Mayne,2009).AnexcellentreviewonthehistoryofindustrialMPC applications can be found in (Qin and Badgwell, 2003). Param- eter uncertainty can be considered by applying the well-known min-max formulation (Kühl et al., 2007), multi-stage methods (Lucia etal., 2013), or tube-based methods (Mayne etal., 2005).
Min-maxMPCtakesintoaccounttheworst-caserealizationofthe parameteruncertainty,although itis conservativeandmayresult inaninfeasibleoptimizationproblem(ScokaertandMayne,1998).
Theconservativenessofmin-maxMPCwasreducedbytakinginto https://doi.org/10.1016/j.compchemeng.2020.106998
0098-1354/© 2020 The Authors. Published by Elsevier Ltd. This is an open access article under the CC BY-NC-ND license. ( http://creativecommons.org/licenses/by-nc-nd/4.0/ )
Nomenclature
c concentration[kmol/m3]
cp heat capacity [Component A…G: kJ/kmolK; water:
kJ/kgK]
d reactordiameter[m]
e controlerror
E activationenergy[kJ/kmolK]
F feedrate[m3/s]
Fj coolantfeedrate[m3/s]
h reactorheight[m]
i ithscenario I runawayindication k kthtimeinstance k0 pre-exponentialfactor
MAT maximumallowedtemperature[°C]
n moles[kmol]
N numberofscenarios OP controlleroutput
p parameters
PST processsafetytime[s]
PSTc criticalprocesssafetytime[s]
r reactionrate[kmol/m3s]
rc,rT partial derivativesofthereactionratewithrespect tocandT
Sp componentfractionofcomponent“P”
t time[s]
T temperature[°C]
u controlinput
U heattransferparameter[kW/m2K]
RD relativedeviation qgen generatedheat[kJ/s]
qrem removedheat[kJ/s]
x statevector
xKC conversionofkeycomponent V reactorliquidvolume[m3] Vj jacketvolume[m3] w weightfactor
Hr reactionheat[kJ/kmol]
ρ
density[kg/m3]ρ
i weightfactorofithscenarioinPHAλ
i weightfactorofithscenarioinPHASubscripts
0 initialconditions control controlhorizon C coolingagent dos dosing
F feed
dos dosed
i ithcomponent
in,i feedconcentrationofithcomponent
J jacket
pred predictionhorizon
R reactor
account the futurefeedback information (Thangavel et al., 2018).
Multi-stageMPCrealizestheuncertaintybyatreeofdiscretesce- narios,whereeachscenariomustsatisfythepredefinedconstraints (Lucia et al., 2013). Puschkle and Misos proposed a robust fea- sible multi-stage economic nonlinear model-predictive controller (eNMPC)withaheuristicmulti-modelapproach,wheretheworst- casescenariosaregeneratedbasedonsensitivities.Theyneglected thescenariosonthe edgesoftheuncertaintyset withlow sensi- tivity(Puschke andMitsos, 2018). A review ofeMPC is found in
(Ellisetal.,2014). Holtorfetal.presentedMulti-StageNMPCwith on-linegeneratedscenariotreesthatdonotdirectlyscalewiththe numberofuncertainparameters(Holtorfetal.,2019).
In reactoroperations, the first objective should always be the safe operation, especially when SBRs perform highly exothermic reactions, since a poorly designed reactor or poorly chosen op- erating parameters can lead to the development of reactor run- away. Although the phenomenon of thermal reactor runaway is well known, lethal accidents unfortunately still occurred in the recent past. The root cause of Seveso-disaster was thermal run- away in1976(Fabianoetal.,2017).In 2001,a polymerizationre- actorexplodedbecauseofareactorrunaway(KaoandHu,2002), and in 2007, an explosion occurred at T2 Laboratories, which causedthedeathoffourpeople(Hall,2010).Thermalrunawayre- sultsin a rapidand significant temperatureincrease inthe reac- tor, which can lead to explosion through the vaporization of re- actants. The temperature increase in the reactor accelerates the heat generation because of the higher reaction rate, which fur- therincreasesthetemperatureandmayresultinreactorrunaway (Schweitzeretal.,2010).Thereareseveralrunawaycriteria,which classifythe reactionoperationstatesasrunawayornon-runaway, so theseequationscan be applied to predictthe developmentof thermal runaway (Kummer and Varga, 2019). Tailored runaway criteria were developed to obtain a more system specific critical equation(Kummeretal.,2019).
Adequatemodelsofbatchreactorscanbe usedforanonlinear model predictive control (NMPC) (Findeisen et al., 2007). More- over, batch andsemi-batch reactors that perform highlyexother- micreactionscanhavehighlynonlinearprocessdynamics,andthe controllermustcopewithit.NMPCcanbeasuitabletool tohan- dle nonlinear processesand is gainingmore attentionbecause it can capture detailed nonlinear dynamics of the system through- outtheentirestatespace(Sekietal.,2001;YuandBiegler,2019).
Since the goal of reactor operation is to maximize productivity while keeping the operation safe in the entire production time, preventionofthermalrunawayisnecessary.Thermalrunawaycri- teria(Strozzi-Zaldivar andModifiedDynamicCondition) wereim- plemented in NMPCto reliably indicatethe developmentof run- away(Kummeretal.,2020).
Differentstabilityanalysestopredictthedevelopmentofther- mal runaway were successfully implemented in NMPC, such as the batch simultaneous model-based optimization and control (BSMBO&C)algorithm.ThisalgorithmisanextensionofNMPCand dynamic real-time optimization (DRTO) techniques, which use a Booleantermthatpenalizestheobjectivefunctionwhenthecon- trollersystemisclosetothermalrunaway(Rossietal.,2015).Spe- cificclassesofdeterministic NMPC/DRTOframeworkscanidentify reactor runaways under parameter uncertainty too (Rossi et al., 2017). Strozzi-Zaldivarcriterion can be toostrict; hence, itis not suitable to analyse the stability of semi-batch reactors in some cases (Kummer and Varga, 2017). Kähm-Vassiliadis criterion for exothermicbatch reactors wasintroduced toovercomethisprob- lem, and the proposed stability criterion can be successfully ap- pliedin batchreactor control toperformhighlyexothermic reac- tions(KähmandVassiliadis,2018a).Thismethodwasalsosuccess- fully generalized to calculate withmultiple reactions (Kähm and Vassiliadis, 2019). Their stability criterion was applied to an in- dustrialcasestudyandtheyconsideredtheparameteruncertainty duringthe process control (Kanavalau et al., 2019). Lyapunovex- ponents asan indicator of stability were successfully realized in NMPC to control batch reactors (Kähm and Vassiliadis, 2018b).
The operation of an industrial semi-batch polymerization reactor wasoptimizedbyconsideringacoolingsystemfailure (Abeletal., 2000). The interaction between control and safety systems was also studied, where an LMPC (Lyapunov-based MPC) systemwas integratedwiththeactivationofasafetysysteminaCSTRtoavoid
thermal runaway (Zhang et al., 2018), and a good review about LMPC can be found in (Albalawiet al., 2018). Recently, two new NMPC-basedmethodswereintroducedtosolvetheclosed-loopdy- namicoptimizationproblems,whichweretestedonasemi-batch reactorwithpotentialrunawayreactions,wheretheadiabatictem- perature rise was considered to avoid reactor runaway. The first methodisbasedonan adaptivebackingoff oftheir boundsalong the moving horizon with a decreasing degree of severity. The second method is a chance-constrained control approach, which considers the relation betweenthe uncertain input and the con- strained output variables. Bothmethods considerthe unexpected disturbancesinadvance,whichresultsinarobustcontrolapproach (Arellano-Garciaetal.,2020).
We proposea controlstrategy forSBRs thatperform potential runawayreactions,wheretheparameteruncertaintyisconsidered.
Weconsiderthemultiplicativeuncertainty,sothemodelmatrices areuncertain.Themostcrucialuncertaintysourcesfromthereac- torrunawayviewpointcan bethe kineticparameters, heattrans- fer parametersandmixingefficiencyforSBRs. Theuncertaintyin kinetic parameters is considered the source of model-plant mis- matchin ourwork. NMPC withtheembedded runawaycriterion can be an effective tool to keep the reactor in the controllable zone,whiletheproductivityismaximized.Weinvestigatedworst- case scenario andMulti-Stage NMPC to handle parameter uncer- tainty,althoughthecomputationcostofMS-NMPCismuchhigher.
ThegoalistodevelopacontrolframeworkforSBRswithexother- micreactions,whichcanbeappliedonlineinrealreactorsystems, sothecomputationtimeiscritical.Therefore,weinvestigatedthe worst-casescenariowithiterativelyupdatinguncertainparameters bytheleast-squaresmethod.NMPCnaturallyincludesthemodelof theprocess,althoughtherealprocessinthiscaseisalsoamodel.
Our future work will be aboutimplementing the proposed con- trolschemeintoareallaboratoryreactorsystem.Currently,wecan generateaplant-modelmismatchtoinvestigatetheproposedcon- trolframework.
2. ProposedcontrolstructureofSBRs
This section will introduce the proposed general control methodology for SBRs that perform potential runaway reactions.
Thepracticalapplicationofthiscontrolstructurewillbepresented inSections3–4.
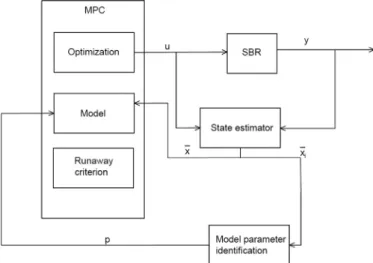
OurperspectiveisthatusinganNMPCwithimplementedrun- awaycriterioncanbeanexcellentsolutiontocontrolSBRs,butwe must handle parameter uncertainty to develop a reliable indica- tiontool.TheproposedcontrolschemeforSBRsisshowninFig.1. When exothermicreactions occur inthereactor, thepoorly iden- tified kinetic parameters (or other model parameters) can easily leadtothedevelopmentofthermalrunawayintheapplicationof themostappropriatecriteria.Intheproposedcontrolscheme,the parameter uncertaintyishandledby thecombinationofstate es- timation andamodelidentificationalgorithm.Sincethermalrun- awaycanhavelethalconsequence,theparameteruncertaintymust behandledsothattheprobabilityofrunawayisclosetozero.For thispurpose,Multi-StageNMPCorworst-casescenariocanbeap- plied.Although we investigatedMulti-Stage NMPC, itshigh com- putational cost is not encouraging (see Section 4.2.1);hence, we suggest applyingtheworst-casescenariowithupdatinguncertain parameters(seeSections4.2.2–4.2.3).
InFig.1,uisthecontrolinputs, yisthereactormeasurement outputs, x¯is the estimated states ofthe reactor, andx¯iis there- quired estimated states for model parameter identification. This schemeisa generalrepresentationofthe proposedcontrol struc- ture.Inourcase,uconsistsofOPF andOPC (valvepositionsinthe feedlineandcoolingagentline,respectively).yincludesTR,TJ,and VL (reactor temperature, jackettemperatureandliquid volumein
Fig. 1. Proposed control scheme for SBRs.
thereactor).x¯consistsofc¯,T¯R, andT¯J(estimatedconcentration,re- actorandjackettemperature,andreactionrateconstants).x¯iinour caseincludesk¯(reactionrateconstants),andpconsistsofk¯0andE¯, whichareidentified parameters.Inthefollowing sections,we in- troducepartsoftheproposedcontrolstructureinmoredetail.
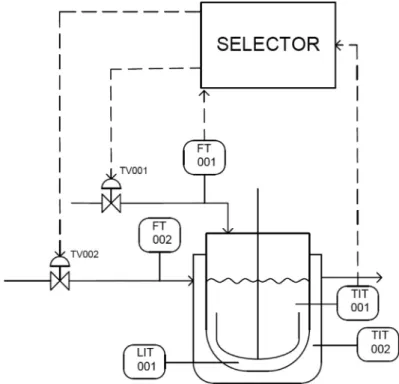
2.1. TemperaturecontrolofSBR
ThemaingoaloftheSBRoperationissimilartoanyotherkind of reactor orprocess unit, such asto maximize the productivity whilekeepingthereactorsafeduringtheentireoperation.There- actor temperatureis controlled by manipulating the flow rate of feedingreagents(TV001) andcooling agent(TV002)intothereac- torjacket,whichistheoftenappliedscheme.Thecontrolstructure ofthereactorsystemisshowninFig.2.Themass-flowofreagent feedis integrated, theamount offed reagentis calculated (Vdos), andtheliquid levelismeasured withLIT001. Whenthe required reagentisadded(Vdos,0),thereactortemperaturecontrol switches the actuator, and the temperature is controlled by manipulating theflow ofcoolingagentinthemixingphase,which was80% of thetotalcoolingcapacityinthefirstphaseofoperation.
Actuator=
TV001 Vdos<Vdos,0TV002 Vdos,0=Vdos (1) A safe operation is characterized by applying two safety reg- ulations. One ofthem is a predefined Maximum AllowableTem- perature(MAT),sothereactortemperature(TIT001)cannotexceed MAT.Theothersafetyboundisapplyingathermalrunawaycrite- riontoavoid dangerousrunaway states.Runawaycriteriaclassify runawayandnon-runawaystatesbasedonthestatevariablesand parametersofthestudiedprocess(concentrationofreagents,pro- cesstemperature, heat ofreaction, heat transfer parameter, etc.).
Therefore,avoidingrunawaystatesincreasesthesafetyofthereac- toroperation.WeappliedtheModifiedDynamicCondition(MDC) in the proposed control scheme (Kummer andVarga, 2019). The MDCstatesthat theproductoftheincreaseinheatremovalwith increasing temperature and the generated to removed heat ratio must exceed the difference between the rate at which the heat generationincreasesasaresultofanincreaseintemperatureand the reduction in the reaction rate as a result of a decrease in reagentconcentration.IftheMDCissatisfied.thereactorstatesare considerednon-runaway(i.e.,normal)operation.
∂
qgen∂
Tc
+
∂
m∂
cT
≤dqrem
dT qgen
qrem
(2)
Fig. 2. Proposed control structure of SBRs.
whereqgen is the generated heat in the reaction, qrem is the re- movedheat,andmisamassbalancefunction.
LetusintroducevariableI(k)to evaluatethereactoroperation basedonrunawayandnon-runaway states.IfEq.(2). issatisfied, then I(k)=0 (normal operation); otherwise, I(k)=1 (runaway), wherekisthek-thtimeinstance.
2.2.Open-loopoptimizationproblem
The goal is to maximize the productivity while thermal run- away doesnot develop, so the conversionof the key component (xKC)andselectivityfortheproduct(SP) areconsideredintheob- jectivefunctionnexttotherunawaystates(Ik),andhigherreactor temperaturesthanMAT(e+)shouldbeavoided.Theobjectivefunc- tion(orstagecostifwerefertoMulti-StageNMPC)isdenotedby L, whichrepresenta generalcost function.The terms ofthecost functionare weighted (wx,ws, wu, wI,wT),so a well performing controlcanbereachedindifferentapplications.Inthethirdterm inEq.(4),significantchangesinthemanipulatedvariablesarepe- nalized.
e+=max
TR,k−MAT;0
(3) L= −wxxKC−wsSp+wu
|
uk−uk−1|
+wIIk+wTe+ (4)min uk
tpred
0
L
(
xk,uk)
(5)whichissubjectto
xk+1=f
(
xk,uk,dk)
(6)0≤uk≤100% (7)
where uk∈Rnuuk is the control input (control valve), nu is the numberof control inputs, each state (xk+1∈Rnx) is a function of thepreviousstate(xk),andnxisthenumberofstates.Therealiza- tionofuncertaintyisdenotedasdk∈Rnd,wherend isthedimen- sionoftheuncertaintyvector.
2.3. NMPCtohandleparameteruncertainty
Wealways mustcount on plant-modelmismatch, sowe must addresstheparameteruncertainty.Thissectionintroducesthefor- mulationofMulti-StageNMPCandWorst-caseScenariotohandle thisproblem.
2.3.1. Multi-StageNMPC
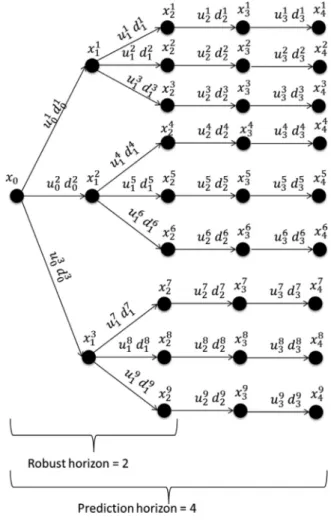
Fig. 2 illustrates how the Multi-Stage NMPC works with the given horizon lengths. For Multi-Stage NMPC, combinations of maximal,minimalandnominalvaluesofuncertainparametersare considered,whichusuallyresultsinarobustbehaviourofthecon- troller(Thangaveletal.,2018).
Eachpathofthescenariotreeiscalledascenarioandindicated asi,anditcontainsallstatesxkj andcontrol inputsukj ofscenario i.Thesetofalloccurringindices(j,k)isdenotedbyTLucia,2014).
ThenumberofscenariosisintroducedbyN.Thecostofeachsce- narioisconsideredwiththesameweight,sothemeanvalueofthe costswill givetheobjectivevalue.TheformulationofMulti-Stage NMPCisshowninEqs.(8)–((11).
min ukj
N
i=1
1 N
tpred
0
Li
xik,uik,dki(8)
whichissubjectto xkj+1= f
xpk(j),ukj,dkj
∀ (
j,k+1)
∈T (9)0≤ukj≤100%
∀ (
j,k)
∈T (10)ukj=ulki f xkp(j)=xkp(l)
∀ (
j,k)
,(
l,k)
∈T (11)wherexkp(i)istheparentnode.Tocorrectlyrepresentthereal-time decisionproblem,thecontrolinputscannotanticipatethevaluesof theuncertaintythat are realizedafterthecorresponding decision point.Itisimportantbecauseitisnotpossibletogivemultiplein- putvariationstotheprocessatthecurrentstate(PuschkeandMit- sos,2018).ThisconditionisenforcedbyEq.(11),whichrepresents
Fig. 3. Tree representation of the uncertainty evolution for a Multi-Stage NMPC ( Thangavel et al., 2018 ).
thenon-anticipativityconstraintsthatrequireallcontrolinputsat the same node to be equal. In Fig.3, thiscondition impliesthat u10=u20=u30; u11=u21=u31;... [36].
Theoptimizationproblemwassolvedbythemodifiedprogres- sivehedgingalgorithm,whichisadecompositionalgorithm,where non-anticipativity constraints are relaxed by penalizing the dif- ference between the control inputs that should satisfy the non- anticipativity constraints. Its advantage is that the scenarios can be independently solved, so the following Eqs. (12)–((15)) opti- mization problem must be solved. As shown by S. Lucia apply- ing alonger robusthorizonofone doesnot significantly improve the result,butit requiresmorecomputational effort, becausethe size of the optimization problem increases exponentially with it (Lucia,2014).Sincethelengthofrobusthorizonisoneinthiscase, onlythefirstcontrolinputs(ui0)ofdifferentscenariosmustsatisfy thenon-anticipativityconstraint.
min ukjLi
xik,uik,dik
+
λ
iui0−uˆi0
+
ρ
iui0−uˆi0
2(12)
whichissubjectto xkj+1= f
xkp(j),ukj,dkj
∀ (
j,k+1)
∈T (13)0≤ukj≤100%
∀ (
j,k)
∈T (14)ˆ ui0=
N
i=1
1
Nui0 (15)
where uˆi0 is the fictious value towards which the control inputs converge to satisfy the anticipativity constraints. Parameters
λ
iand
ρ
i areupdated ateachiteration toimprovetheconvergence, wheretheupdateruleis:λ
i=λ
i+ρ
iui0−uˆi0
(16)
ρ
i=minβρ
i,ρ
max(17) where
β
determines the increase ofρ
i. Eqs. (12)–(15) are iter-ativelysolved until max(ui1−uˆi1)<
ε
. After severaliterations thenon-anticipativity constraints are satisfied with desiredtolerance
ε
.2.3.2. Worst-casescenario
Two non-desired scenarios can be distinguished. In the first scenario,thereactionrateismuchhigherthanexpected;then,the generatedheatwillbemuchhigherintheprocessthanthemodel, whichmaycausethermalrunaway.Inthesecondscenario,thefed reagentaccumulates because the reaction rateis lower than ex- pected. When the concentration increases to a critical point, the reaction ignites, and thermal runaway may occur. To select the worst case scenario. we must choose between these two possi- blescenarios.Thereisahugedifference inignitiontimebetween thesetwo scenarios. The first scenario results in a more conser- vativesolution,sincethe ignitiontime islower; hence,ifwe can handlethe first scenario,we can alsoavoid the second scenario.
Therefore,we suggest kinetic parametersfor worstcases that re- sultinhigherreaction rates,andwe will apply thefirst scenario astheworstcasebyincreasingthepre-exponentialfactor(k0)and decreasingtheactivation energy(E)totheedgeoftheconfidence interval.
2.4.Parameteridentification
The logarithm ofthe reaction rate constant (k) linearlyvaries withthe reciprocaloftemperature(Eq.(18)), sotheleastsquares methodcanbeappliedtoestimate thepre-exponential factorand activationenergyofthereaction.
ln
¯k
=ln
¯k0
− E¯RT (18)
Estimated reaction rate constants are required to calculate Eq.(18),sothestateobserverisnecessaryinthecontrolstructure.
Since the reliability ofthe estimated kinetic parameters depends onthereliabilityofthestate observer,weimplementacondition that mustbe satisfiedtooverwritethe actual kineticparameters.
RD=100
σ
pμ
p <1% (19)where
μ
p andσ
p are themeanandstandarddeviationofuncer-tain parameters. Due to thiscondition, the estimatedkinetic pa- rameters do not significantly vary, so our reliability in thesepa- rametersishigher.Iftheestimatedparametersare farawayfrom theworstcasescenariotheuncertainparametersarenotupdated.
Therefore,weupdate theseparameters ifEq.(19)issatisfiedand iftheestimatedvaluesarewithintheconfidenceinterval.
2.5.StateestimationbasedontheextendedKalmanfilter
In realsystems only some measurements are available online (see Section 2.1), andusually eachor noneofthe concentrations cannotbemeasuredonline.Therefore,stateestimationofthesys- tem is necessary to use an effective NMPC in real systems. We mustestimatetheconcentrationofreagentsandproductsanduse it as a feedback in NMPC. The state estimation is necessary to
identifyuncertainkinetic parameters. The extendedKalman filter is a suitable algorithm to estimate states of non-linear systems (QuandHahn,2009;KhodadadiandJazayeri-Rad,2011),soweim- plementedthisalgorithm.Ifthereisa closed-formexpressionfor thepredictedstateasafunctionofthepreviousstate(xˆk),controls (uk)andnoise(wk),thepredictedstateiscalculatedbyEq.(20). ˆ
xk+1=f
ˆ
xk,uk,wk
(20) Themeasurementisthefunctionofthestate(xk)andmeasure- mentnoise(vk).
zk=h
(
xk,v
k)
(21)TypicallyforSBRs,themeasurementvector(zk)consistsoftem- peratureandlevelmeasurements, andthe stateestimationvector ˆ
xkconsists of concentrations and temperatures.
To improve the state estimation accuracy, additional variables wereimplemented intothemodelofEKF,which arethereaction rateconstantsofthereactions(kl).Estimatingnewstatevariables inEKFisnottimeconsuming,anditdoesnotincreasethecompu- tationaltime.Tosolvethisissue,wemustknowhowthereaction rateparametersvarywithtime;sincethereactionrateparameter varieswithtemperature(k = k(T)),the following equation isde- fined:
dkl dt =dkl
dT dT
dt =k0,lexp
−El RT El
RT2 dT
dt (22)
2.6.Processsafetytimetodefinethelengthofthepredictionhorizon
IncaseofMPCthepredictionhorizonmustbesufficientlylong tocapturethefirstrunawaystates,sothesestatescanbeavoided duringthe reactor operation. Runaway criteriacan be applied to definethe length ofpredictionhorizonby defining the firsttime instantwhenarunawaystateoccurs(alsocalledtheprocesssafety time,PST)accordingtotheappliedrunawaycriterion.ThePSTcan bedefinedasfollows:
PST=argmink
(
Ik=1)
(23)Since the PSTis a function of state variables and systempa- rameters,we mustcalculatethe PSTfortheworst case, which is calledthecriticalPST.Thus,theSBRsystemmustbeconsidereda batch(i.e.,ifundesiredeventsoccurinSBRs,ourfirstactionshould be closing the feeding valve of reagent), and we must calculate withthose state variables where the probability ofaccumulation isthehighest(lowreactortemperature,initialreagentsconcentra- tion,etc.).Differentscenarios(i=1…n)mustbeanalysedbyvary- ingtheinitialconcentrationofreagents(whicharefedintothere- actor)todefinemaximumprocesstemperatures(T(i)max)andpro- cesssafetytimes(PST(i)). Criticalinitial states(x0,c) willbe these initialstateswherethemaximumprocesstemperatureequalsMAT.
LengthofpredictionhorizonwillbethePSTatcriticalinitialstates (Kummeretal.,2020).
tpred= PST
|
i(TR,max=MAT) (24) 3. ProcessmodelandanalysisThissectionpresentstheprocessmodeloftheinvestigatedfed- batch reactorfromWilliams-Otto process, where normalandab- normaloperationsthatcausethermalrunawayarepresented.The processsafetytime ofthe systemisalso calculatedto define the lengthofthepredictionhorizon.
3.1.Processmodelofthereactorsystem
The Williams-Otto process (WOP) has been used for years to test different control and optimization algorithms Arellano- Garcia et al., 2020). We optimize the fed-batch version of this
process as presentedin (Rossi etal., 2016). In the Williams-Otto process three exothermicreactions occur, which are presentedin Eqs.(25)–((27)followedbytheequationofreactionrates.
A+B→C r1=k0,1exp
−E1
RT
cAcB (25)
B+C→P+E r2=k0,2exp
−E2RT
cBcC (26)
C+P→G r3=k0,3exp
−E3
RT
cCcP (27)
ComponentAispreloadedandcomponentBiscontinuouslyfed intothereactor.ThedesiredproductiscomponentP,andtwoco- productscanbeformed:componentsEandG.
The following differential equations Eqs. (28)–((31)) describe thedynamicalbehaviourofthereactorsystem:
dci dt = Fin
VR
cini −ci +NR
l=1
υ
ilRl i=1...NC (28)dVR
dt =Fin (29)
dTR
dt = 4U DR NC
i=1cicpi
Tj−TR +Fin Ni=1C cINi cpiVR NC i=1cicpi
Tin−TR−
NR l=1
Hr,lRl
NC i=1cicpi
(30)
dTj
dt = 4UVR
DRVj
ρ
jcpj TR−Tj+ Fj
Vj
Tjin−Tj(31)
The kinetic parameters, component properties and reactor constructional and operating parameters are summarized in Tables1–3.Theparameterswillbehandledasnominalhereinafter.
TheconstraintsaredefinedinTable3,suchastheMAT,andmax- imumfeedratesofthereagentandcoolingagent.
Table 1
Kinetic and thermodynamic parameters of reactions ( Rossi et al., 2016 ; Sriram and Stevens, 1973 ).
Parameter Value Unit
Pre-exponential factors k 0,1 1.3833 10 5 kmolm3s k 0,2 6.0098 10 7
k 0,3 2.2288 10 11
Activation energies ER1 6450 K
E2
R 8778.5
E3
R 11,155
Heat of reactions H r,1 −1.851 10 5 kmolkJ H r,2 −2.5765 10 5
H r,3 −5.053 10 5
Table 2
Component properties ( Rossi et al., 2016 ; Sriram and Stevens, 1973 ).
Component Molecular weight [kg/kmol]
Specific heat [kJ/kmolK]
A 142 321.204
B 60 127.14
C 202 352.288
E 81 166.212
P 181 426.617
G 383 844.132
[kJ/kgK]
Cooling agent (water) 18 4.186
Table 3
Reactor constructional and operating parameters ( Rossi et al., 2016 ; Sriram and Stevens, 1973 ).
Parameter Value Unit
d 1 M
h 3.5 M
V j 0.8236 m 3
U 0.8 kWm2
c in 1 kmolm3
T in,R 298 K
T in,j 298 K
c 0,A 1 kmolm3
V 0 0.5 m 3
T 0,R 312 K
T 0,J 308 K
F max 1e-3 ms3
F j,max 1e-2 ms3
MAT 335 K
Fig. 4. Reactor behaviour at different dosing times and cooling agent flow rates.
3.2. AnalysisofwopinSBR
Thebehaviour oftheinvestigatedreactorsystemwasanalysed withnocontrolsystem(i.e.,theBreagentfeedisconstant),where the maximum process temperatures are analysed in functionsof thedosingtimeandflowrateofcoolingagent.Theremainingap- plied parameters are shown in Section 3.1. As shown in Fig. 4, poorlychosenoperatingparameterscandevelopthermalrunaway.
Accordingtothemodel,theprocesstemperaturecanexceed900K.
Themaximumtemperaturerapidlyincreases,andthereisnointe- riorpointbetweennormalprocesstemperatures(underMAT)and runawaytemperatures(>900K).Althoughtheoptimalfeedingtra- jectory can increase the productivity, increasing the flow rateof coolingagentenablesanoperationwithlessdosingtime,asshown inFig.4.
RunawaystatesaredistinguishedbytheMDCcriterion,andthe derived criticalequation forthe processisintroduced inEq.(32). nr
l=1
−
Hr,jrj,TV− nr
l=1
nc
i=1
rl,cli≤
nrl=1−
Hr,lrlV
TR−Tj (32)
wherenristhenumberofreactions,ncisthenumberofreagents inthe L -threaction,rT andrc are thederivativesofthereaction
Fig. 5. Reaction rates during an operation (Dosing time: 1.8 hr, Feed rate: 0.55 m 3/hr, Cooling flow rate: 36 m 3/hr).
ratewithrespecttotemperatureandconcentrationofreagentsre- spectively.
To avoid thermal runaway uncertain kinetic parameters are quitesignificant,soweinvestigatehowtheparallelreactionsdom- inateduringthereactoroperation.Fig.5showsthereactionrates;
thefirstreaction(R1)hasthehighestrateduringthewholeoper- ation.Toinvestigatetheproposedcontrolscheme,weonlychoose thekinetic parameters ofthe first reaction asuncertain. Because thefirstreactionisdominant,theuncertaintyofthisreactionhas thehighesteffectonthebehaviourofthereactor.
3.3.Processsafetytimeofthesystem
Aspresented inSection 2.6,the length ofthepredictionhori- zoncan be defined basedon the process safetytime ofthe sys- tem.MaximumreactortemperaturesandPSTsareinvestigated,as showninFig.6.MATisreachedat~1.36 kmolm3 initialconcentration, wherethePSTis0.59h. Inthiscase,theminimumlength ofthe predictionhorizonis0.59h.
3.4.Stateestimationoftheinvestigatedsystem
Thissection presentstheefficiency ofEKFonthe investigated model system. First Eqs. (28)–(31) were applied to estimate the statesof the system, and the measured variables are the reactor temperature, jackettemperatureand reactionvolume (the inflow rateismeasured, which isthe only parameterthat increases the reaction volume). The results are generated next to 5% parame- terdeviationinpre-exponentialfactorandactivationenergyofthe firstreaction.
As shownin Fig. 7a,the estimations of reagentconcentration are quite poor, whichcan resultin false runaway indicationand thermalrunawayofthesystem.Ifthefirstreactionrateparameter (k1) is estimated the accuracy can be increased, as presented in Fig.7b.Thestateestimationsareacceptablewiththismodification.
4. ResultsofNMPC
This section provides the results of NMPC with and without parameteruncertainty. Theperformance improvement duetopa- rameteridentificationispresented.Theoptimizationproblemwas
Fig. 6. PST of the system according to the MDC criterion.
solved by the interior-point algorithm, where the algorithm pro- ceedsamovinghorizon(VanderbeiandShanno,1999).Theapplied parameters,whichwere heuristicallyselected, aresummarized in Table4.
Table 4
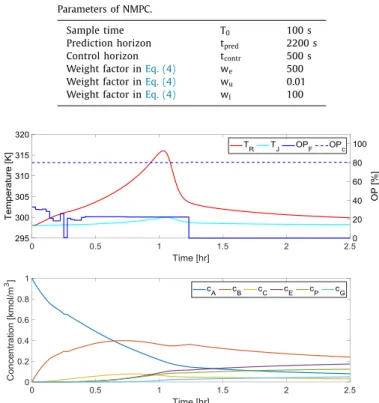
Parameters of NMPC.
Sample time T 0 100 s
Prediction horizon t pred 2200 s
Control horizon t contr 500 s
Weight factor in Eq. (4) w e 500 Weight factor in Eq. (4) w u 0.01 Weight factor in Eq. (4) w I 100
Fig. 8. Reactor operation with nominal NMPC.
4.1. Resultsoftheopen-loopcontrolwithoutparameteruncertainty
NMPC is tested without anyuncertain parameter and the re- sultsareshowninFig.8.Thereactortemperaturestaysfarbelow
Fig. 7. State estimation based on EKF.
Fig. 9. Result of MS-NMPC with nominal kinetic parameters.
Fig. 10. Results of NMPC with respect to the worst case.
MATsincetheappliedMDCcriterionconstraintsthereactoroper- ation thatincreasestheprocess safety.At2.5htheconversionof componentAis76%,andtheyieldofPis37%.The averagecom- putationaltimeis11.5speriterationsinthiscase.
4.2. Resultsoftheopen-loopcontrolunderparameteruncertainty
Theeffectoftheparameteruncertaintywasanalysedusingtwo different algorithms inSections 4.2.1 and4.2.2. In the first case, Multi-Stage NMPC was applied, in second case, the worst-case scenario was used to solve the optimization problem under pa- rameteruncertainty. Kineticparameters ofthefirst reaction(k0,1, E1) were chosen as uncertain, where the confidence interval is
±5%.Section 4.2.3 provides theresults of theoptimization prob- lemwhentheuncertainparametersareupdatediteratively.
4.2.1. ResultsofMulti-StageNMPC
The Multi-StageNMPC algorithmwastestedwherethe uncer- tainkineticparameterswerechangedby5%.Twouncertainparam- etersleadtoninescenarios.AsshowninFig.9,thefeedratesare maintainedatlow valuesduetotheuncertainkineticparameters.
The reason is that the constraintsmust be satisfied in each sce- nario,sothe developmentofthermalrunawayisavoided ineach scenario.Therefore,theresultswithMulti-StageNMPCareconser- vativecomparedtothenominalsolution(Fig.8).At2.5hthecon-
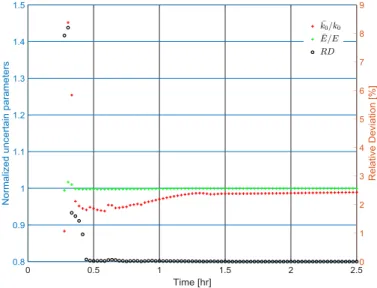
Fig. 11. Results of NMPC initialized from the worst-case scenario with updating ki- netic parameters.
Fig. 12. Result of the parameter fitness.
version ofcomponent Ais 15.3%, andthe yieldof Pis 2.4%. The averagecomputationtimeis660speriterations,soreal-timeop- timizationisnotfeasiblewiththeMulti-StageNMPCalgorithm.
4.2.2. Resultsoftheworst-casescenario
The worst case is that the real reaction rate is higher than expected, so in the worst-case scenario, the uncertain pre- exponentialfactor increasesby 5% (k0,1 + 5%),andthe uncertain activationenergy decreases by 5%(E1–5%).The NMPCresultsare showninFig.10,whichnaturallyisaconservativeresult.Thecon- version at2.5h is45%, andtheyield ofproductP is 16%.In the worst-casescenario,theaveragecomputationtimeis17.2sperit- erations,soreal-timeoptimizationisfeasiblewiththisalgorithm.
4.2.3. Worst-casescenariowithupdatinguncertainparameters The results of the proposed control structure, which wasini- tializedfrom theworst case, asshownin Fig. 11. Withupdating uncertainkinetic parameters, thereactortemperature controlbe- comeslessconservativeandimprovesthe productivityoftheop- erationcomparedtotheworst-casescenario.
At2.5h the conversionofcomponent Ais74%, andthe yield ofPis36%.Fig.12showstheestimateduncertainkineticparam- eters; basedon the update criterion (Eq. (19)andestimated val-
uesarewithintheworstcaseinterval)kineticparametersarefirst overwrittenat0.61h.Theaveragecomputationtimeis12.6sper iterations,hencethereal-timeoptimizationisfeasiblewiththisal- gorithm.
Fig. 12 showshow the valuesof identified kinetic parameters gotothe realparameters asmoreinformationandmeasurement isavailable aboutthesystem. Lowrelative deviations(<1%)indi- catethattheidentifiedkineticparametersonlyslightlychange,so wecansaythattheidentifiedkineticparametersarenearthereal system,andwecanupdatetheuncertainparameters.
5. Conclusion
A framework to keep SBRs with exothermic reactions under controlinthewholeoperationusinganonlinearmodelpredictive control approach is proposed. The framework wastested on the semi-batch version of the Williams-Otto process including three reactions.Theproposed controlapproachcanalsohandletheun- certainkinetic parameters ofreactions.Inthiswork, theparame- tersofthefirstdominantreactionareconsideredthesourceofun- certaintyinthemodel.TheproposedframeworkconsistsofNMPC, EKF and an identification tool. The Modified Dynamic Condition was implemented into NMPC as an additional safety constraint, and the reactor temperature cannot exceed MAT. EKF is neces- sarytoestimatethestatevariablesofthereactorsystemandreac- tionrateconstants.Kineticparameterscanbeidentifiedwithleast squaresmethods basedon the estimatedreactionconstants after someformaltransformation.
We havecompared the Multi-Stage NMPC solved by the pro- gressivehedgingalgorithmandworst-casescenario.Eachresulted inaconservative solution,buttheworst-casescenarioNMPC has lowercomputationtime.InthecaseofMS-NMPC,thesize ofthe optimization problemincreases exponentially with the length of therobust horizonandwiththe uncertainparameters. Therefore, we have decided to extend the worst-case scenario NMPC with thestateestimationandidentificationalgorithms.Theresultsshow thattheproposedapproach canhandleuncertainkinetic parame- ters,andcanbe applied inreal reactorsystems inwhich reactor runawaycandeveloptoensuretheoptimalproduction.
Our future investigation will be about implementing the pro- posedcontrolapproachintoalab-scalereactorsystem.
DeclarationofCompetingInterest
Theauthorsdeclarethattheyhavenoknowncompetingfinan- cialinterestsorpersonalrelationshipsthatcouldhaveappearedto influencetheworkreportedinthispaper.
CRediTauthorshipcontributionstatement
Alex Kummer:Conceptualization, Methodology, Software,For- mal analysis, Investigation, Writing - original draft, Writing - review & editing, Visualization. Lajos Nagy: Conceptualization, Methodology, Writing - review & editing, Supervision. Tamás Varga:Conceptualization,Methodology,Writing-review&editing, Supervision.
Acknowledgement
We wouldliketoexpressouracknowledgementforthefinan- cialsupportofSzéchenyi2020underGINOP-2.2.1-15-2017-00059. Tamás Varga’s contribution to this paper was supported by the UNKP-19-4 New National ExcellenceProgram of the Ministry for InnovationandTechnology.
References
Abel, O., Helbig, A., Marquardt, W., Zwick, H., Daszkowski, T., 20 0 0. Productivity op- timization of an industrial semi-batch polymerization reactor under safety con- straints. J. Process Control 10 (Aug. (4)), 351–362. doi: 10.1016/S0959-1524(99) 0 0 049-9 .
Albalawi, F., Durand, H., Christofides, P.D., 2018. Process operational safety via model predictive control: recent results and future research directions. Comput. Chem.
Eng. 114, 171–190. doi: 10.1016/j.compchemeng.2017.10.006 , Jun.
Arellano-Garcia, H., Barz, T., Dorneanu, B., Vassiliadis, V.S., 2020. Real-time feasi- bility of nonlinear model predictive control for semi-batch reactors subject to uncertainty and disturbances. Comput. Chem. Eng. 133, 106529. doi: 10.1016/j.
compchemeng.2019.106529 , Feb.
Ellis, M., Durand, H., Christofides, P.D., 2014. A tutorial review of economic model predictive control methods. J. Process Control 24 (Aug. (8)), 1156–1178. doi: 10.
1016/j.jprocont.2014.03.010 .
Fabiano, B., Vianello, C., Reverberi, A.P., Lunghi, E., Maschio, G., 2017. A perspec- tive on Seveso accident based on cause-consequences analysis by three different methods. J. Loss Prev. Process Ind. 49, 18–35. doi: 10.1016/j.jlp.2017.01.021 , Sep.
Findeisen, R. , Allgöwer, F. , Biegler, L.T.(Eds.) , 2007. Assessment and Future Directions of Nonlinear Model Predictive Control, 358. Springer Berlin Heidelberg, Berlin, Heidelberg .
Hall, R.J., “Explosion at T2 Laboratories,” 2010. https://www.aiche.org/academy/
webinars/explosion- t2- laboratories .
Holtorf, F., Mitsos, A., Biegler, L.T., 2019. Multistage NMPC with on-line generated scenario trees: application to a semi-batch polymerization process. J. Process Control 80, 167–179. doi: 10.1016/j.jprocont.2019.05.007 , Aug.
Kähm, W., Vassiliadis, V.S., 2018a. Thermal stability criterion integrated in model predictive control for batch reactors. Chem. Eng. Sci. 188, 192–207. doi: 10.1016/
j.ces.2018.05.032 , Oct.
Kähm, W., Vassiliadis, V.S., 2018b. Optimal Lyapunov exponent parameters for sta- bility analysis of batch reactors with Model Predictive Control. Comput. Chem.
Eng. 119, 270–292. doi: 10.1016/j.compchemeng.2018.08.038 , Nov.
Kähm, W., Vassiliadis, V.S., 2019. Thermal stability criterion of complex reactions for batch processes. Chem. Eng. Res. Des. 150, 187–205. doi: 10.1016/j.cherd.2019.07.
028 , Oct.
Kühl, P. , Diehl, M. , Milewska, A. , Molga, E. , Bock, H.G. , 2007. Robust NMPC for a benchmark fed-batch reactor with runaway conditions. In: Findeisen, R., All- göwer, F., Biegler, L.T. (Eds.). In: Assessment and Future Directions of Nonlin- ear Model Predictive Control, 358. Springer Berlin Heidelberg, Berlin, Heidel- berg, pp. 455–464 .
Kanavalau, A., Masters, R., Kähm, W., Vassiliadis, V.S., 2019. Robust thermal stability for batch process intensification with model predictive control. Comput. Chem.
Eng. 130, 106574. doi: 10.1016/j.compchemeng.2019.106574 , Nov.
Kao, C.-S., Hu, K.-H., 2002. Acrylic reactor runaway and explosion accident analy- sis. J. Loss Prev. Process Ind. 15 (May (3)), 213–222. doi: 10.1016/S0950-4230(01) 0 0 070-5 .
Khodadadi, H., Jazayeri-Rad, H., 2011. Applying a dual extended Kalman filter for the nonlinear state and parameter estimations of a continuous stirred tank reac- tor. Comput. Chem. Eng. 35 (Nov. (11)), 2426–2436. doi: 10.1016/j.compchemeng.
2010.12.010 .
Kummer, A., Varga, T., 2017. Feeding trajectory optimization in fed-batch reactor with highly exothermic reactions. Comput. Chem. Eng. 98, 1–11. doi: 10.1016/j.
compchemeng.2016.12.008 , Mar.
Kummer, A., Varga, T., 2019. Completion of thermal runaway criteria: two new cri- teria to define runaway limits. Chem. Eng. Sci. 196, 277–290. doi: 10.1016/j.ces.
2018.11.008 , Mar.
Kummer, A., Varga, T., Abonyi, J., 2019. Genetic programming-based develop- ment of thermal runaway criteria. Comput. Chem. Eng., 106582 doi: 10.1016/j.
compchemeng.2019.106582 , Sep.
Kummer, A., Varga, T., Nagy, L., 2020. Semi-batch reactor control with NMPC avoiding thermal runaway. Comput. Chem. Eng. 134, 106694. doi: 10.1016/j.
compchemeng.2019.106694 , Mar.
Lucia, S., Finkler, T., Engell, S., 2013. Multi-stage nonlinear model predictive con- trol applied to a semi-batch polymerization reactor under uncertainty. J. Process Control 23 (Oct. (9)), 1306–1319. doi: 10.1016/j.jprocont.2013.08.008 .
Lucia, S., “Robust multi-stage nonlinear modelpredictive control,” 2014.
Mayne, D.Q., Seron, M.M., Rakovi ´c, S.V., 2005. Robust model predictive control of constrained linear systems with bounded disturbances. Automatica 41 (Feb. (2)), 219–224. doi: 10.1016/j.automatica.2004.08.019 .
Puschke, J., Mitsos, A., 2018. Robust feasible control based on multi-stage eN- MPC considering worst-case scenarios. J. Process Control 69, 8–15. doi: 10.1016/
j.jprocont.2018.07.004 , Sep.
Qin, S.J., Badgwell, T.A., 2003. A survey of industrial model predictive control tech- nology. Control Eng. Pract. 11 (Jul. (7)), 733–764. doi: 10.1016/S0967-0661(02) 00186-7 .
Qu, C.C., Hahn, J., 2009. Process monitoring and parameter estimation via unscented Kalman filtering. J. Loss Prev. Process Ind. 22 (Nov. (6)), 703–709. doi: 10.1016/j.
jlp.2008.07.012 .
Rawlings, J.B. , Mayne, D.Q. , 2009. Model Predictive Control: Theory and Design. Wis:
Nob Hill Pub, Madison .
Rossi, F., Copelli, S., Colombo, A., Pirola, C., Manenti, F., 2015. Online model-based optimization and control for the combined optimal operation and runaway pre- diction and prevention in (fed-)batch systems. Chem. Eng. Sci. 138, 760–771.
doi: 10.1016/j.ces.2015.09.006 , Dec.
Rossi, F., Reklaitis, G., Manenti, F., Buzzi-Ferraris, G., 2016. Multi-scenario robust on- line optimization and control of fed-batch systems via dynamic model-based scenario selection. AIChE J. 62 (Sep. (9)), 3264–3284. doi: 10.1002/aic.15346 . Rossi, F., Manenti, F., Pirola, C., Mujtaba, I., 2016. A robust sustainable optimization &
control strategy (RSOCS) for (fed-)batch processes towards the low-cost reduc- tion of utilities consumption. J. Clean. Prod. 111, 181–192. doi: 10.1016/j.jclepro.
2015.06.098 , Jan.
Rossi, F., Manenti, F., Buzzi-Ferraris, G., Reklaitis, G., 2017. Combined dynamic opti- mization, optimal control and online runaway detection prevention under un- certainty. Chem. Eng. Trans. 57, 973–978. doi: 10.3303/CET1757163 , 0.
Schweitzer, J.-M., López-García, C., Ferré, D., 2010. Thermal runaway analysis of a three-phase reactor for LCO hydrotreatment. Chem. Eng. Sci. 65 (Jan. (1)), 313–
321. doi: 10.1016/j.ces.2009.07.012 .
Scokaert, P.O.M., Mayne, D.Q., 1998. Min-max feedback model predictive control for constrained linear systems. IEEE Trans. Automat. Control 43 (Aug. (8)), 1136–
1142. doi: 10.1109/9.704989 .
Seki, H., Ogawa, M., Ooyama, S., Akamatsu, K., Ohshima, M., Yang, W., 2001. In- dustrial application of a nonlinear model predictive control to polymerization reactors. Control Eng. Pract. 9 (Aug. (8)), 819–828. doi: 10.1016/S0967-0661(01) 0 0 046-6 .
Sriram, M., Stevens, W.F., 1973. An example of the application of nonlinear program- ming to chemical-process optimization. Oper. Res. 21 (1), 296–304. doi: 10.1287/
opre.21.1.296 , Feb.
Thangavel, S., Lucia, S., Paulen, R., Engell, S., 2018. Dual robust nonlinear model predictive control: a multi-stage approach. J. Process Control 72, 39–51. doi: 10.
1016/j.jprocont.2018.10.003 , Dec.
van Woezik, B.A .A ., Westerterp, K.R., 20 0 0. The nitric acid oxidation of 2-octanol. A model reaction for multiple heterogeneous liquid–liquid reactions. Chem. Eng.
Process. 39 (Nov. (6)), 521–537. doi: 10.1016/S0255-2701(0 0)0 0 099-4 . Vanderbei, R.J., Shanno, D.F., 1999. An interior-point algorithm for nonconvex non-
linear programming. Comput. Optim. Appl. 13 (1/3), 231–252. doi: 10.1023/A:
1008677427361 .
Westerterp, K.R., Molga, E.J., 2004. No more runaways in fine chemical reactors. Ind.
Eng. Chem. Res. 43 (Aug. (16)), 4585–4594. doi: 10.1021/ie030725m .
Yu, Z.J., Biegler, L.T., 2019. Advanced-step multistage nonlinear model predictive control: robustness and stability. J. Process Control 84, 192–206. doi: 10.1016/j.
jprocont.2019.10.006 , Dec.
Zhang, Z., Wu, Z., Durand, H., Albalawi, F., Christofides, P.D., 2018. On integration of feedback control and safety systems: analyzing two chemical process applica- tions. Chem. Eng. Res. Des. 132, 616–626. doi: 10.1016/j.cherd.2018.02.009 , Apr.
Zhang, B., Hou, H., Hao, L., Zhu, J., Sun, Y., Wei, H., 2019. Identification and opti- mization of thermally safe operating conditions for single kinetically controlled reactions with arbitrary orders in isoperibolic liquid-liquid semibatch reactors.
Chem. Eng. J. 375, 121975. doi: 10.1016/j.cej.2019.121975 , Nov.