27. FÜGGELÉK
27.1. Folyamatirányítás labor
27.1.1. MATLAB alapismeretek
Ebben a fejezetben a laborgyakorlat elvégzéséhez szükséges MATLAB ismereteket foglaljuk össze.
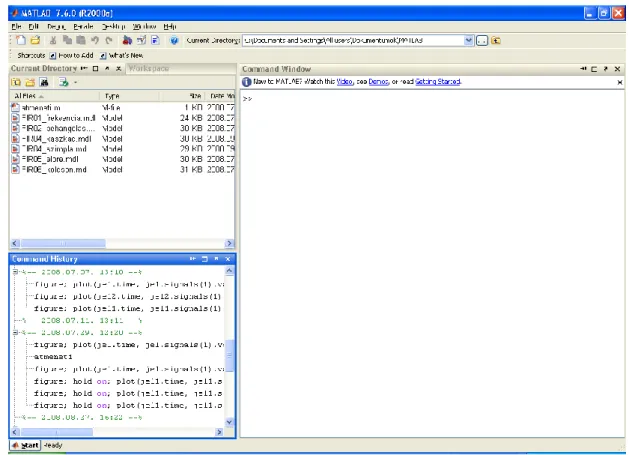
27.1.1.1. MATLAB indítása
A MATLAB indításakor középen a Command Window jelenik meg. Itt lehet megadni szöveges parancsokat a >> jel után, és Enter lenyomásával futtatni.
A billentyűzet fel és le nyilainak segítségével lépkedhetünk a parancsok előzményeiben. Így, ha egymás után többször ugyanazt, vagy nagyon hasonló parancsot szeretnénk alkalmazni, akkor azokat nem kell újra begépelni.
A Command Window-tól balra középen látható az aktuális könyvtár. A kiválasztott fájlra duplán kattintva megnyithatjuk azt. Az aktuális könyvtárat a Command Window felett módosíthatjuk.
A Command Window-tól balra lent, a History ablakban láthatók a parancsok előzményei.
27.1. ábra. MATLAB indítása Az ábra kivetítésére szolgáló animáció 27.1.1.2. Simulink
A Simulink a MATLAB egy modulja, amelynek segítségével dinamikus rendszereket modellezhetünk, szimulálhatunk és analizálhatunk. A laborgyakorlat során ebben a modulban készült modelleket fogunk használni.
A Simulink a Command Window-ból indítható a ’simulink’ parancs (aposztrófok nélkül) kiadásával.
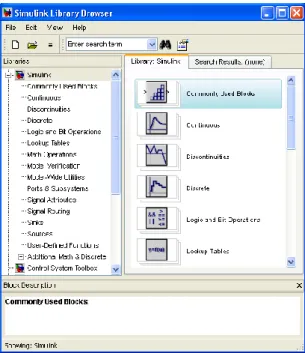
Simulink Library Browser
A Simulink indítása után megnyílik a Simulink Library Browser, ami a modellekben felhasználható egységeket mutatja.
Új modell hozható létre a Simulink Library Browser bal felső sarkában az ikonra kattintva.
A létrehozott modellbe az egységek a Simulink Library Browser-ből az egérrel húzhatók be.
A létrehozott egységek tulajdonságai (input/output portok száma, működési paraméterek) az egységre duplán kattintva megnyíló ablakban adhatók meg.
Az egységek között kapcsolat hozható létre, hogy ha egy output portból az egeret folyamatosan lenyomva tartva nyilat húzunk egy input portba, illetve fordítva.
A kapcsolatok el is ágaztathatók: Egy input portból indítva a nyilat nemcsak egy output port lehet a nyíl kiinduló pontja, hanem egy már létező nyíl is. Ekkor az adott output portból kimenő jel érkezik mindkettő input portba. Jelek összegzése csak Sum tag segítségével lehetséges.
Szimuláció
Egy létrehozott modellen szimuláció futtatható a modell felett az ikonra kattintva. Ha a szimuláció túl sokáig tart, akkor a mellette levő ikonra kattintva leállítható. A szimuláció hossza (másod- percben) a fenti két ikontól jobbra található dobozban adható meg.
A szimuláció eredménye valamilyen nyelő egység (pl. Scope) vagy ’figure’ parancs segítségével jeleníthető meg.
Configuration Parameters
Előfordulhat, hogy a szimuláció során a kirajzolt görbék nem igazán görbék, hanem inkább törött vonalak. Ennek az lehet az oka, hogy a szimuláció során a lépésköz túl nagy volt.
A szimuláció lépésköze megadható a ’Simulation’ – ’Configuration Parameters’ menüpontra kattintva. A ’Type’ legördülő menüben a ’Variable-step’ értéket választva a program maga határozza meg a lépésköz nagyságát. Ha ezt ’Fixed-step’ értékre állítjuk, akkor az újonnan megjelenő dobozban megadhatjuk a lépésköz nagyságát. Általában 0,1-es lépésköz használata javasolt. (Megjegyzés: A laborgyakorlat során az előre elkészített modellekben a lépésköz 0,1-re van állítva.)
Bode- és Nyquist-diagramok
A Simulink segítségével lehetséges a modell Bode és Nyquist-diagramjait kirajzoltatni. Ehhez szükséges, hogy a modellben legyen legalább egy In1, és legalább egy Out1 egység.
A diagramok kirajzoltatásához a ’Tools’ – ’Control Design’ – ’Linear Analysis’ menüpontra kell kattintani. A megnyíló Control and Estimation Tools Manager ablak alján a legördülő menüben ki kell választani az ábrázolni kívánt diagram típusát, majd a tőle balra levő ’Linearize Model’ gombra kell kattintani.
A megjelenő diagramon a görbe egy pontjára kattintva megjelennek a kiválasztott pont adatai.
Ha egyszerre több kimenő jelet is ábrázoltunk, akkor a diagramra jobb gombbal kattintva felugró menüben az ’I/O Grouping’ – ’All’ menüpontot kiválasztva a kimenő jelek egy diagramban ábrázolhatók.
A megjelenített diagram típusa megváltoztatható a diagramra jobb gombbal kattintva felugró menüben a Plot types menüpontban.
27.2. ábra. Simulink Library Browser Az ábra kivetítésére szolgáló animáció
Bode-diagram
A Bode-diagramot ábrázolva a felső diagram függőleges tengelyén az értékek alapesetben decibelben vannak ábrázolva. Ez átállítható a diagramra jobb gombbal kattintva felugró menüben a ’Properties’
menüpontra felnyíló ablakban. A ’Units’ fülön a ’Magnitude’ sorban az első legördülő menüben válasszuk ki az ’absolute’ értéket, a második legördülő menüben pedig a ’log scale’ értéket.
Nyquist-diagram
A Nyquist-diagramot ábrázolva alapesetben a negatív frekvencia értékekhez tartozó pontok is láthatók.
Ez kikapcsolható a diagramra jobb gombbal kattintva felugró menüben a Show menüpont alatt.
27.1.1.3. Diagramok készítése
Szimuláció után a kimenő jelek időbeni lefutása megjeleníthető Scope egység segítségével. Ha az így megjelenített diagram nem elég pontos, akkor lehetőség van diagram kirajzoltatására is, amelyről pontosabb adatok olvashatók le.
Diagram rajzolásának előfeltétele, hogy az ábrázolni kívánt jelhez a modell Scope egységét csatlakoztassunk. A Scope egység tulajdonság ablakában be kell jelölni, hogy milyen néven hivatkozunk a tárolt adatokra, valamint fontos, hogy a ’Structure with time’ formátumot választva minden szimulált ponthoz az időérték is el legyen mentve. Ezután le kell futtatni a szimulációt.
Diagram rajzolásához a Command Window-ba a következő parancsot kell beírni:
figure; plot(variable_name.time, variable_name.signals(1).values)
A ’variable_name’ helyére a Scope egységben megadott változó nevét kell írni. A laborgyakorlat során az előre elkészített modellekben a szabályozott jel neve a legtöbb esetben ’jel’, az integrálkritérium neve pedig ’ISE’.
A fenti parancsot lefuttatva megjelenik a diagram. Az ikonra, majd a megjelenített görbe egy pontjára kattintva egy datatip helyezhető el a diagramon, ami megjeleníti a kiválasztott pont értékeit.
Alapesetben a datatipet bárhová helyezzük a diagramon, mindig a legközelebbi számolt pontra ugrik.
Ez kikapcsolható a diagramra jobb gombbal kattintva felugró menüben a ’Selection Style’ – ’Mouse Position’ menüpontra kattintva.
Újabb ilyen datatip is elhelyezhető a diagramon a diagramra jobb gombbal kattintva felugró menüben a ’Create New Datatip’ menüpontra kattintva, vagy ha a datatip elhelyezése közben lenyomva tartjuk az Alt billentyűt.
A tengelyek skálái, illetve a diagram megjelenített része nem csak a nagyítás/kicsinyítés lehetőséggel módosítható. A tengelyek megjelenített részének határai pontosan megadhatók az ’Edit’ –
’Axes Properties’ menüpontra kattintva megnyíló alsó ablakrészben. Ez az ablakrész megnyitható az eszközsor ikonjára, majd valamelyik tengelyre kattintva is. Ezt a lehetőséget használva pontosan meghatározható például a szabályozási idő értéke.
Ugyanebben az ablakrészben a bal alsó sarokban, a ’Grid’ sorban kijelölhető, hogy mely koordináta rácsvonalai legyenek megjelenítve. Az X-tengelyen megjelenítve a rácsvonalakat könnyebben lehet leolvasni pl. két görbe közötti időkésést.
27.1.1.4. Egységek
A teljesség igénye nélkül felsoroljuk a laborgyakorlat során leggyakrabban alkalmazott egységeket, és azok leggyakrabban alkalmazott beállításait.
Simulink / Continuous / Transfer Fcn
Első- és magasabb rendű egységek átviteli függvénye.
Numerator coefficient – Átviteli egység erősítése
Denominator coefficient – Az egység átviteli függvényének nevezőjében szereplő tagok szorzótényezői. Alapesetben a nevezőben két tag van, és az egység elsőrendű. Több szorzótényező megadásával az egység automatikusan magasabb rendű lesz.
Simulink / Math Operations / Sum
A bemenő jelek összegét, illetve különbségét képezi.
List of signs – Megadható, hogy az egyes bemenő portokon beérkező jelek
hozzáadódnak (+) vagy kivonódnak (-) a kimenő jelben továbbított összeghez.
Több jel is definiálható, ezzel növelve az egység input portjainak számát. A jelek közötti | jelek csak a bemenő portok megjelenített helyzetét befolyásolják.
Simulink / Signal Routing / Mux
Segítségével az ugyanazon Scope egységbe bemenő jelek egy diagramban jeleníthetők meg.
Number of inputs – Input portok száma Simulink / Sinks / Out1
Bode- és Nyquist-diagramok megjelenítéséhez szükséges output port.
Simulink / Sinks / Scope
A beérkező jelek az idő függvényében diagramban ábrázolhatók.
– Scope paramétereinek megadása
A ’Limit data points to last’ checkboxot ki kell kapcsolni, így a szimuláció összes pontja el lesz mentve.
A ’Save data to workspace’ checkboxot be kell kapcsolni, így a mért adatok a plot parancs segítségével megjeleníthetők lesznek.
A ’Variable name’ mezőbe azt a nevet kell írni, amely néven az elmentett pontokra a későbbiekben hivatkozni akarunk.
A ’Format’ mezőben a ’Structure with time’ lehetőséget választva minden elmentett adatnál az idő értéke is tárolva lesz. Így lehetőségünk lesz a plot parancs segítségével a pontokat az idő függvényében ábrázolni.
– Diagram nagyítása a kijelölt területre.
– Diagram X tengelyének nagyítása a kijelölt területre.
– Diagram Y tengelyének nagyítása a kijelölt területre.
– Diagram minden pontjának ábrázolása a lehető legjobb nagyítással.
Az egér jobb gombjával előhívható felugró menüben két menüpont érhető el.
’Axes Properties’ – Az Y tengely megjelenített tartománya adható meg.
’Zoom Out’ – Az előző nagyításra kicsinyít vissza.
Simulink / Sources / In1
Bode- és Nyquist-diagramok megjelenítéséhez szükséges input port.
Simulink / Sources / Sine Wave Szinuszos zavarás.
Amplitude – A zavarás amplitúdója.
Frequency (rad/sec) – A zavarás körfrekvenciája.
Simulink / Sources / Step Ugrászavarás.
Step time – Zavarás ideje.
Final value – Zavarás nagysága.
27.3. ábra. ’Scope’ parameters Az ábra kivetítésére szolgáló
animáció
Simulink Extras / Additional Linear / PID Controller PID szabályozó
Proportional – P tag erősítési tényezője (APC).
Integral – I tag erősítési tényezője (AIC). Ha az I tag ki van kapcsolva, értéke 0.
Derivative – D tag erősítési tényezője (ADC). Ha az D tag ki van kapcsolva, értéke 0.
27.1.2. Frekvenciavizsgálat 27.1.2.1. Elméleti háttér
A folyamatirányítás célja valamilyen folyamat automatizálása. Az irányítási rendszer szerkezetileg különböző bonyolultságú készülékekből, szervekből, elemekből és jelvivő vezetékekből áll. A rendszer tetszés szerint kiválasztott részét, illetve annak jelformáló tulajdonságai összességét nevezzük tagnak. A tag jelformáló tulajdonságai megadhatók valamilyen jellemző összefüggéssel (matematikai modell, jelgörbe, átviteli függvény). A bemenő jel a tagot működésre késztető külső jel, a kimenő jel a tag működése során kialakuló jel.
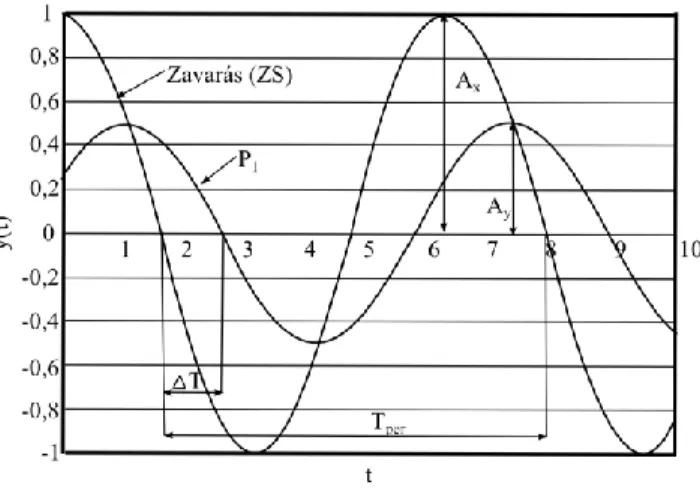
Ha egy tetszőleges átviteli függvényű tagra bemenőjelként egy körfrekvenciájú szinuszfüggvényt adunk, akkor hosszabb-rövidebb átmeneti időszak után kvázistacionárius állapot jön létre, azaz a kimeneten egy állandó amplitúdójú szinuszjel jön ki, amelynek frekvenciája azonos a bemenő szinuszjel frekvenciájával, de attól amplitúdóban és fázisban eltér (27.4. ábra). A frekvenciavizsgálat során ezeket az eltéréseket mérjük meg.
27.4. ábra. Egy tag
A frekvenciavizsgálat során az amplitúdó-eltérést, mint az AY/AX hányadost (amplitúdóviszony) vizsgáljuk. Ez a hányados nem függ a bemenő szinuszjel amplitúdójától, de függ a bemenő szinuszjel körfrekvenciájától, -tól. A fáziskésés is függ az -tól. Sok különböző frekvenciával megismételve a mérést az amplitúdóviszonyt (AV=AY/AX) és a fázisszöget, mint a frekvenciafüggvényét kapjuk meg.
2
1 és f
A f AV A
X
Y
Ez a két függvény adja meg a vizsgált tag frekvenciafüggvényét. A tag frekvenciafüggvénye a tag jelátvivő tulajdonságát a frekvenciatartományban írja le, ugyanolyan egyértelműséggel, mint pl. az átviteli függvény a Laplace-tartományban.
Ha ismerjük egy tag átviteli függvényét, abból a frekvenciafüggvényt is kiszámíthatjuk. Ha az átviteli függvényben végrehajtjuk az s = j· helyettesítést, akkor egy komplex számot kapunk. A komplex szám abszolút értéke az körfrekvenciájú bemenő jellel mért amplitúdók hányadosa, a komplex szám szöge pedig a be- és kimenő hullámok közötti fáziskülönbség. Sokféle -t behelyettesítve kiszámítható a teljes frekvenciafüggvény.
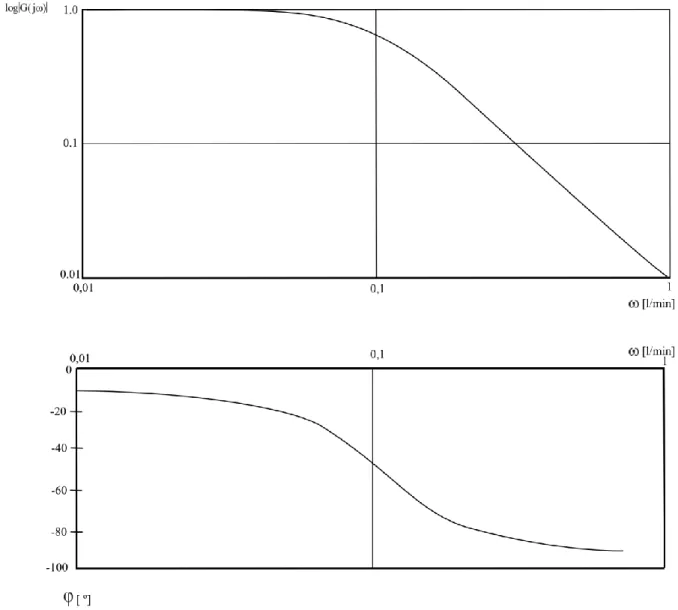
A frekvenciafüggvényt két eltérő módon szokták ábrázolni. A Bode-diagram valójában két diagram.
27.5. ábra. Elsőrendű tároló Bode-diagramja
Az egyik az amplitúdóviszony vs. körfrekvencia diagram, mindkét tengelyén logaritmikus osztással. A másik a fáziskésés vs. körfrekvencia diagram, a tengelyen lineáris, az tengelyen logaritmikus osztással. A két diagramot egymás alá szokás rajzolni, a kettős diagramot hívják Bode- diagramnak.
A Nyquist-diagram (helygörbe, polárdiagram) a frekvenciafüggvényt mint komplex számot ábrázolja a komplex számsíkon. A függvény minden pontja egy vektor, amely az origóból indul ki. A vektornak a pozitív reális tengellyel bezárt szöge a (a be- és kimenő hullámok közötti fáziskülönbség), a vektor hossza az abszolút érték, azaz az amplitúdóviszony
AV G(j)
. Avektor végpontjához odaírjuk a hozzá tartozó -t. A szokásos Nyquist-diagram a vektorok végpontjait összekötő vonal. A vonalra rajzolt nyíl a körfrekvencia növekedésének irányát jelzi.
27.6. ábra. Nyquist-diagram 27.1.2.2. A mérés célja
Egy elsőrendű és egy másodrendű tag frekvenciafüggvényének felvétele frekvenciavizsgálat segítségével.
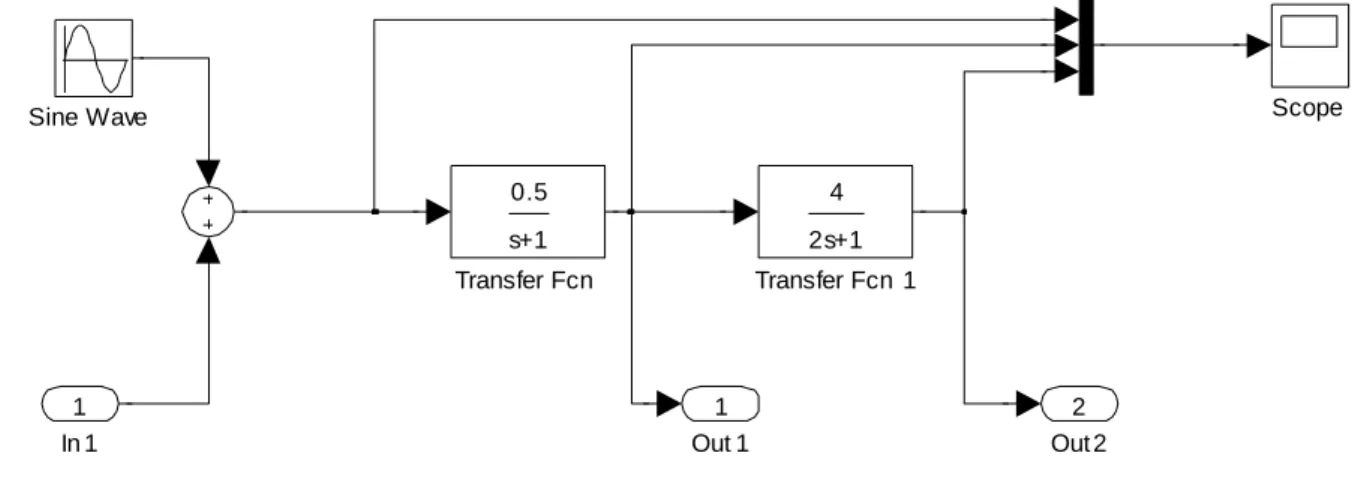
Töltse be a FIR02_frekvencia.mdl nevű fájlt! A kettő, sorba kötött elsőrendű tagon áthaladó jel reprezentálja egy másodrendű tag viselkedését.
27.7. ábra. A betöltött hálózat Az ábra kivetítésére szolgáló animáció 27.1.2.3. Mérési feladatok
Szimulálja a folyamat válaszát a szinuszos zavarásra, majd a kapott görbékről olvassa le az első- és a másodrendű tag amplitúdóviszonyait (G(j∙)), az időkésésből számítsa ki a fáziskésést, majd töltse ki a 27.1. táblázatot! Végül a táblázat adatainak segítségével készítse el a tagok Bode- diagramjait!
A Bode-diagramhoz 6-8 pont felvétele szükséges, ezekből 2-3 pont a sarokfrekvencia előtt, 2-3 a sarokfrekvencia után legyen, lehetőleg minél inkább homogén eloszlásban. Először töltse ki a táblázatot = 1; 5 és 10 értékeknél végzett futtatások eredményeivel, majd ezek alapján válassza meg a további ábrázolandó pontok körfrekvenciáját!
Out 2 2 Out 1
1
Transfer Fcn 1 4 2s+1 Transfer Fcn
0.5 s+1
Sine Wave Scope
In 1 1
Az eredményeket gyűjtse a táblázatba, és ábrázolja a függelékben található diagramon!
27.1. táblázat. Az amplitúdóviszonyok és a fáziskésések
Zavarás 1. rendű tag 2. rendű tag
(rad/s) Tper=2 (s)
G(j∙) T (s) () G(j∙) T (s) ()
Megjegyzés:
A futtatás eredménye egy diagram, mely három hullámvonalat ábrázol. Ha a szinuszos zavarás amplitúdója 1, a diagramon a bemenő jel a -1 és 1 között mozgó hullám. A másik két hullám az első- és a másodrendű tag kimenő jele.
Az amplitúdóviszonyt (G(j∙)) a kimenő és a bemenő hullám amplitúdójának a hányadosa adja.
A kimenő jel fáziskésése meghatározható a kimenő hullám időkéséséből (T) és a periódusidőből (Tper) egy egyenes arányosság ( 360
per
T
T ) segítségével, lásd 27.8. ábra.A diagram kiértékelésénél vegye figyelembe, hogy a kezdeti időtartományban a hullámok amplitúdója még nem állandó, ezért az amplitúdóviszonyt és a fáziskésést későbbi időintervallumban (pl. t = 100-120) kell meghatározni, amikor a hullámok amplitúdója állandósul!
27.8. ábra. Fáziskésés meghatározása Az ábra kivetítésére szolgáló animáció Beadandók
1. A kitöltött táblázat és Bode-diagram
27.1.3.Szabályozókörök behangolása
Egy szabályozókör behangolása, illetve beállítása az az eljárás, melynek során meghatározzuk a szabályozón (P, PI, PID) beállítandó erősítési tényezők értékét. Ehhez nem kell ismerni a szabályozott szakasz átviteli függvényét, ellenben bizonyos kísérleti vizsgálatokat kell végezni a szakasz tulajdonságainak megállapítására. A vizsgálatok eredménye alapján táblázatok segítségével határozzuk meg a szükséges beállításokat. Ezek a táblázatok empirikusan megállapított értékeket tartalmaznak, használatuk a tapasztalatok szerint „jó” szabályozásokat eredményez. A „szabályozás jósága” itt kvalitatív fogalom, nem túl sok lengés után beáll a végállapot. Természetesen a „jóság” kvantitatív fogalmait is fel lehet használni a szabályozókör beállítására.
1.) Szabályozókör beállítása a szabályozott szakasz átmeneti függvénye alapján
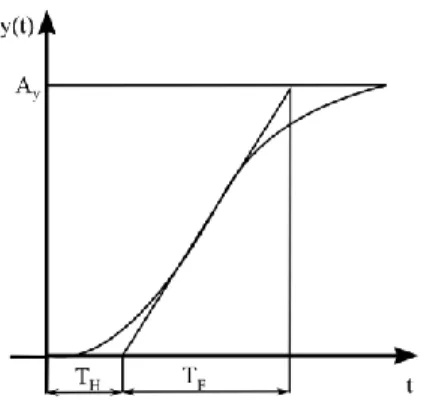
Akkor alkalmazható, ha a szakasz önbeálló, azaz átmeneti függvénye az ábrához hasonlít, és elvégezhető rajta az ábra szerinti szerkesztés, hogy az inflexiós pontba érintőt húzunk (27.9. ábra). A szerkesztés eredménye a holtidő (TH) és a felfutási idő (TF) értéke. A két adat felhasználásával a táblázat alapján a szabályozó beállítása meghatározható.
27.9. ábra. Szabályozókör behangolása a szabályozott szakasz átmeneti függvénye alapján Ez az eljárás annak felel meg, hogy a szakasz – egyébként nem ismert – átviteli függvényét a
) 1 /(
)
(s Ke T S
G THs F elsőrendű holtidős tag átviteli függvényével helyettesítjük. Az érintő szerkesztésével TH és TF értékét határozzuk meg. K értéke a ki- és bemenő jelek nagyságából számítható.
A beállítás eredménye attól függően jó vagy kevésbé jó, hogy a fenti helyettesítés mennyire közelíti meg a valóságos viselkedést.
2.) Beállítás belengetéses módszerrel, a kritikus paraméterek (APC0 és T0) megkeresése
A vizsgálatot a zárt szabályozókörrel kell elvégezni.
P szabályozást kell létrehozni, az esetleges I és D szabályozórészeket ki kell kapcsolni.
Egy tetszőleges AP erősítési tényező mellett ugrászavarást adunk a körre. Ha a kapott válasz stabil, azaz a lengések amplitúdója csökken, illetve végértékhez tart, akkor egy nagyobb AP
értékkel próbálkozunk. Ha a válasz instabil, azaz a lengések amplitúdója növekszik, akkor kisebb AP értékkel próbálkozunk.
Ilyen módon próbálkozva megkeressük az APC0 értékét, azaz azt az erősítési tényezőt, amelynél a zavarásra adott válasz változatlan amplitúdójú lengés. Ilyenkor a szabályozókör a stabilitás határán van. A lengés periódusideje T0.
APC0 és T0 ismeretében a mellékelt, Ziegler-Nichols féle javasolt szabályozó-paramétereket tartalmazó táblázatból meghatározhatjuk a szabályozó beállítását.
A kétféle szabályozóbehangolási módszerhez készített táblázat összeállításánál arra törekedtek, hogy P és PI szabályozás esetén félamplitúdós csillapítás jöjjön létre, azaz minden féllengés amplitúdója az előző féllengés amplitúdójának a fele legyen. Ez azzal ekvivalens, hogy kb. 3 periódus után beáll a végállapot, és a szabályozási idő becsülhető a Tkrit
háromszorosaként. Az esetek túlnyomó többségében a törekvés sikeres. PID szabályozásnál a csillapítás erősebb, mint félamplitúdós, kevesebb, mint 3 lengés után már beáll a végállapot.
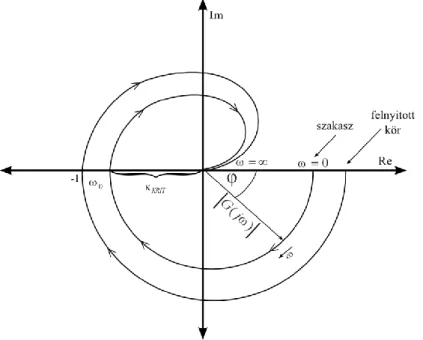
3.) APC0 és T0 értékének kiszámítása, ha a szabályozott szakasz frekvenciafüggvénye ismert A számítás alapja a Nyquist-féle stabilitási kritérium: egy szabályozókör a stabilitás határán van akkor, ha a felnyitott kör frekvenciafüggvénye átmegy a -1 ponton; azaz a felnyitott kör frekvencia- függvényén a 180°-os fáziskéséshez 1 abszolút értékű amplitúdóviszony tartozik.
A felnyitott kör frekvenciafüggvényét jelen esetben a szabályozott szakasz és a P szabályozó soros kapcsolásaként kapjuk. (A távadó és a beavatkozó szerv a szabályozott szakasz része.) A P szabályozó fáziskésést nem okoz, a felnyitott kör fáziskésése azonos a szakasz fáziskésésével.
A frekvenciafüggvény alapján történő hangolás során a szabályozó nélküli szakasz frekvencia- függvényét vesszük fel, és ebben keressük a = –180°-hoz tartozó pontot, ahol a görbe a negatív
valós tengelyt metszi. Az ehhez a ponthoz tartozó körfrekvencia 0 az amplitúdóviszony pedig Kkrit,(A 27.10. ábrán AFkrit -tel jelölve.) amik a szabályozandó szakaszra jellemző értékek.
A T00 = 2 és KAPC0 = 1 egyenletekből T0 és APC0 értéke kiszámítható.
27.10. ábra. Nyquist-diagram Megjegyzés
A belengetéses és a frekvenciafüggvény alapján történő hangolás során ugyanazokat az APC0 és T0
értékeket keressük. A szakasz elemeinek (folyamat, távadó és beavatkozó szerv) erősítése adott, ezeken változtatni nem tudunk. Ezáltal adott a Kt értéke is.
A frekvenciafüggvény alapján történő hangolás során az APC0 értékét elméleti úton, a Nyquist-féle stabilitási kritérium alapján határozzuk meg. Keressük a szakasszal sorba kötött P szabályozó erősítésének azon értéket, amelyet beállítva a kört a stabilitás határára hoznánk. Más szavakkal élve milyen erősítést kellene beállítani a P szabályozón, ha el akarjuk érni, hogy a felnyitott kör frekvenciafüggvénye átmenjen a –1 ponton? Azaz milyen APC0 értéknél teljesül az APC0·K=1 feltétel?
A belengetéses módszerrel ugyanezt az APC0 értéket keressük, de kísérleti módon. Ezen módszer során ténylegesen sorba kapcsoljuk a P szabályozót a szakasszal, és zárjuk a szabályozókört. Ezután keressük a szabályozó erősítésének azon értékét, amellyel a kört kritikus állapotba, a stabilitás határára hozzuk. Ezt az állapotot úgy azonosítjuk, hogy ekkor a kimenő jel állandó amplitúdójú lengést végez.
A mérés célja
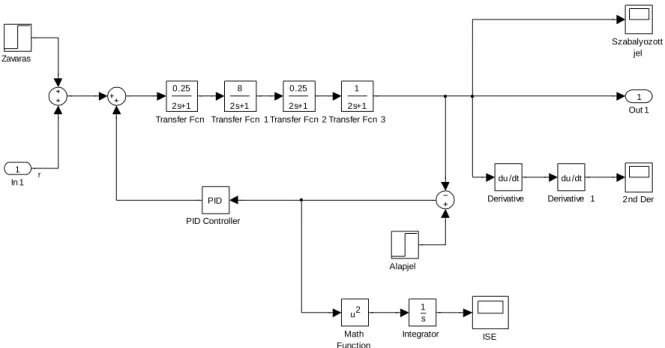
Hangolja be az adott visszacsatolt szabályozókört a szabályozott szakasz átmeneti függvénye alapján, valamint belengetéses módszerrel, végül a mért kritikus értékeket vesse össze a frekvencia- függvényből számított értékekkel! Használja a FIR03_behangolas.mdl fájlt!
27.11. ábra. Szabályozókör modellje Az ábra kivetítésére szolgáló animáció Az integráló tag kimenő jele tartalmazza az integrálkritérium értékét:
a e
2ISE
x x dt.Az integrálkritérium alapján összehasonlíthatók a különböző szabályozási módok. Minél kisebb ISE értéke, annál jobbnak tekintjük a szabályozást.
27.1.3.1. Szabályozókör behangolása a szakasz átmeneti függvénye alapján
A mérés során a szabályozott szakasz ugrásválaszából határozza meg a látszólagos holtidőt (TH), a felfutási időt (TF) és az erősítési tényezőt (K), majd ezek alapján az itt megadott táblázat segítségével számítsa ki a szabályozón beállítandó értékeket!
A mérés menete
1. Vegye fel a szabályozott szakasz ugrásválaszát nyílt láncban (szabályozás nélkül)! A
’Szabályozott jel’ jeleníti meg az időfüggvényt.
2. Az ugrásválaszból olvassa le AY értékét, melyből AF számítható! Az időállandók meghatározásához a Command Window-ba írja be az ’atmeneti’ parancsot (aposztrófok nélkül)!
Határozza meg TH és TF értékeit a kapott adatokból!
3. Számítsa ki és állítsa be a P, PI, PID szabályozók javasolt értékeit! Zárja a szabályozókört, majd futtassa le a szimulációt! Olvassa le az integrálkritérium (ISE), a maradó eltérés (yme), a szabályozási idő (Tszab) és a maximális túllendülés (ymax) értékeit!
Out 1 1 Zavaras
Transfer Fcn 3 1 2s+1 Transfer Fcn 2
0.25 2s+1 Transfer Fcn 1
8 2s+1 Transfer Fcn
0.25 2s+1
Szabalyozott jel
PID Controller PID
Math Function
u2
Integrator 1 s
ISE
Derivative 1 du /dt Derivative
du /dt
Alapjel
2nd Der In 1
1 r
Javasolt szabályozó-paraméterek
Szabályozó TI TD
P TF/TH 0
PI 0,9 TF/TH 3,33 TH 0
PID 1,2 TF/TH 2 TH 0,5 TH
ahol KAPC.
A programban a szabályozók beállítandó paraméterei:
APC K
I PC
IC T
A A ADC APCTD.
Beadandó
1. Ugrászavarás értéke, leolvasott AY, TH, és TF, kiszámolt AF értékek 2. Kitöltött táblázat
Megjegyzés
A maximális túllendülés (ymax) egyenlő a kimenő jel legnagyobb eltérésével az alapjeltől.
A szabályozási idő (Tszab) leolvasásához a folyamatot akkor tekinthetjük szabályozottnak, ha a kimenő jel eltérése a végértéktől egy adott eltérés alá csökken. A megengedett eltérés maximális értékét mérnöki megfontolások alapján kell meghatározni. Ezen mérés során a megengedett eltérés maximális értéke ±0,1.
27.12. ábra. Maximális túllendülés és szabályozási idő 27.1.3.2. Szabályozókör behangolása belengetéssel
A mérés során a zárt, P szabályozót tartalmazó körre adjon ugrászavarást, és AP értékét változtatgatva határozza meg a kritikus erősítést (APC0) és a kritikus lengésidőt (T0), majd táblázat segítségével számolja ki a szabályozókon beállítandó paramétereket!
A mérés menete
1. P szabályozóval zárt körben tetszőleges AP szabályozó paraméter esetén vegyen fel ugrásválaszt!
(’Szabályozott jel’ jeleníti meg az időfüggvényt.)
2. Változtatgassa APC értékét, míg állandó amplitúdójú lengés jön létre! Az ekkor beállított APC0 érték a kritikus erősítés (APC0). (T0 leolvasásához célszerű a figure parancsot használni.)
3. Számítsa ki az optimális szabályozó-paramétereket a táblázat alapján P, PI, és PID szabályozókra, beállításuk után olvassa le az ISE, yme, Tszab, ymax értékeket!
4. Mindhárom szabályozó esetén a módosított jellemzőre adott zavarás értékét állítsa nullára, és az alapjelre adjon 1-es nagyságú ugrászavarást, majd nézze meg a szabályozott jellemző változását!
Javasolt szabályozó-paraméterek
Szabályozó APC TI TD
P 0,5 APC0 0
PI 0,45 A PC0 T0 /1,2 0 PID 0,6 A PC0 0,5 T0 T0/8 A programban a szabályozókba beállítandó paraméterek:
APC
I PC
IC T
A A ADC APCTD.
Beadandó
1. Ugrászavarás értéke, leolvasott APC0 és T0 értékek 2. Kitöltött táblázat
3. Alapjel-zavarás hatása
27.1.3.3. Kritikus paraméterek meghatározása frekvenciafüggvényből
A mérés során a programmal rajzoltassa ki a felnyitott szakasz Nyquist-diagramját, majd keresse meg a = -180°-hoz tartozó 0 körfrekvenciát (mely esetén a diagram áthalad a valós tengelyen), és olvassa le AFkrit értékét! A fenti egyenletek segítségével határozza meg a kritikus paramétereket!
Beadandó
1. A leolvasott Kkrit és 0 értékek 2. A számított APC0 és T0 értékek 3. Konklúzió
Beadandó
1. Számított és meghatározott kritikus paraméterértékek viszonya (B és C feladat).
2. Melyik behangolás pontos és gyors?
3. Melyik szabályozó pontos és gyors?
Válaszait a leolvasott adatok alapján indokolja!
27.1.4.Kaszkádszabályozás Elméleti háttér
A szabályozás minőségének javítása érdekében az egyszerű szabályozókör felépítését több ismert módon meg lehet, illetve szokták változtatni. A legismertebb ilyen megoldás a kaszkádszabályozás, amikor két szabályozókört építünk egymásba.
Akkor lehet a kaszkádszabályozást alkalmazni, ha a szabályozott szakasznak van egy olyan jól elkülöníthető része, amelyben egy zavarás aránylag gyors változást okoz egy mérhető paraméteren.
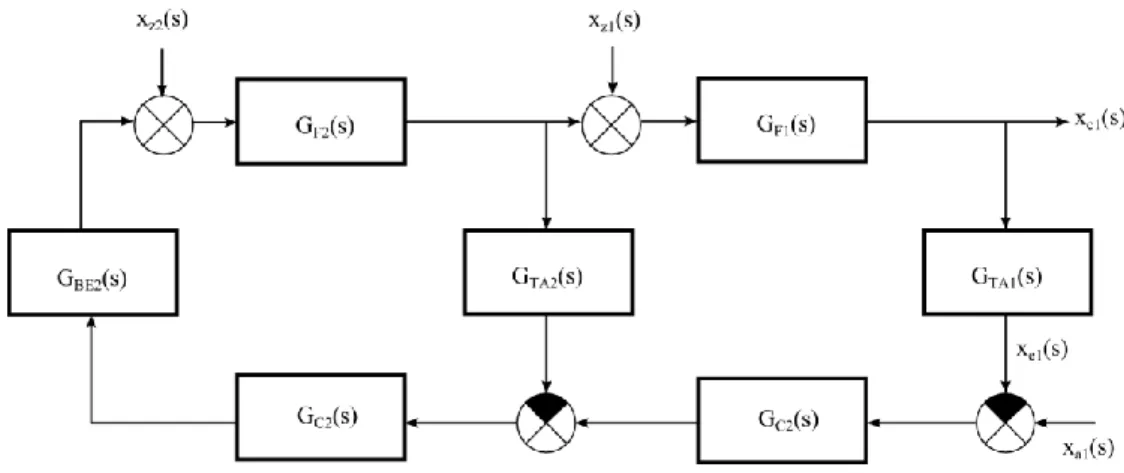
Ezt a paramétert ellenőrző jelként használva egy szabályozókört építünk ennek a zavarásnak a kom- penzációjára. Így ez a zavarás, illetve ennek a hatása már csak alig, vagy elhanyagolható mértékben fogja zavarni a szakasz többi részének működését. A többi zavarás hatását a szakasz szabályozott paraméterére tett szabályozó kompenzálja. A kaszkádszabályozás blokkvázlata a 27.13. ábrán látható.
A szabályozott szakasz két részből áll (GF1, GF2), az „elkülöníthető rész" a 2 indexszel jelölt; az xz2 zavarás hatása jelenik meg az xc2 paraméteren. A 2 indexű szabályozókör neve: belső kör, szekunder kör, slave kör. Az 1 indexű kör neve: külső kör, primer kör, master kör. A teljes belső kört úgy tekinthetjük, mint a külső kör szabályozott szakaszának egy elemét.
A kaszkádszabályozás akkor működik jól, ha a szekunder kör periódusideje sokkal kisebb, mint a kül- ső köré. A belső kör gyors működése érdekében – ha lehetséges – P szabályozót szoktak alkalmazni.
27.13. ábra. A kaszkádszabályozás blokkvázlata A kaszkád kör behangolása
Először a belső kört hangoljuk be. Ehhez a külső kört megszakítjuk, a belső kört belengetéses módszerrel behangoljuk. A belső kör szabályozója legyen P szabályozó. Zárjuk a külső kört, és azt is behangoljuk ugyanazzal a módszerrel.
A mérés célja
A mérés célja a kaszkádszabályozás minőségjavító hatásának bemutatása. Az összehasonlításhoz végezzen el egyszerű szabályozást a szabályozott szakaszon P, PI, PID szabályozókkal! Az egyes szabályozások jóságát jellemezze a szabályozási idővel, a szabályozott jellemző maximális túllendülésének nagyságával és a négyzetes integrálkritérium kiszámításával (P szabályozás esetén a maradó eltéréssel), külön a z1 és a z2 zavarásra! Majd állapítsa meg ugyanezeket jól behangolt kaszkádszabályozás esetén is!
A mérés menete Szimpla kör
27.14. ábra. Szimpla kör Az ábra kivetítésére szolgáló animáció
Zavaras 2
Zavaras 1
Transfer Fcn 4 1 20 s+1 Transfer Fcn 3
1 10 s+1 Transfer Fcn 2
1 5s+1 Transfer Fcn 1
1 5s+1 Transfer Fcn
1 2s+1
Szabalyozott jel
Math Function
u2 Kulso PID
PID
Integrator 1 s
ISE Alapjel
1. Nyissa meg a FIR04_szimpla.mdl nevű hálózatot! Azonosítsa be a hálózat elemeit (szakasz, szabályozó, hol érheti zavarás a folyamatot)!
2. Határozza meg a GC2 szabályozó paramétereit belengetéssel! Van-e jelentősége annak, hogy melyik ponton zavarja a szakaszt belengetéskor? Miért?
3. Vizsgálja a szabályozást mindhárom szabályozóval (P, PI és PID) xz1 (’Zavaras 1’) és xz2 (’Zavaras 2’) esetén! Töltse ki a táblázatot!
Kaszkád kör
27.15. ábra. Kaszkád kör Az ábra kivetítésére szolgáló animáció
1. Nyissa meg a FIR04_kaszkad.mdl nevű hálózatot! Azonosítsa be a hálózat elemeit!
2. Hangolja be a belső kört belengetéses módszerrel! Ügyeljen rá, hogy a belengetés alatt a külső kör nyitva legyen (ehhez célszerű a külső kör szabályozójának kimenőjelét törölni)! (Természetesen a belső körre adunk zavarást a belengetés során, és a közbenső mérhető jellemzőt hozzuk állandósult lengésbe.) Jegyezze fel a kritikus lengésidőt! Számolja ki, és állítsa be a belső kör P szabályozójának erősítését!
3. Zárja a külső kört, és hangolja be ezt is belengetéssel (belső kör eközben zárt)! Van-e jelentősége annak, hogy melyik ponton zavarja a szakaszt belengetéskor? Miért? Jegyezze fel a kritikus lengésidőt!
4. Válassza ki a korábbi tapasztalatok alapján, melyik a legjobb szabályozó! Számítsa ki a kiválasztott szabályozó paramétereit!
5. Vizsgálja a szabályozást a két különböző zavarásnál, töltse ki a táblázatot!
Értékelés
1. A külső kör hangolásakor van-e jelentősége annak, hogy melyik ponton zavarja a szakaszt? Miért?
2. Van-e hatása a zavarás helyének a szabályozásra visszacsatolásnál, illetve kaszkádszabályozásnál?
3. Melyik szabályozás bizonyult hatékonyabbnak?
4. Teljesült-e a kritikus lengésidőkre vonatkozó feltétel kaszkádszabályozásnál?
Válaszait indokolja a leolvasott adatok alapján!
27.1.5. Előrecsatolt szabályozás Elméleti bevezető
Akkor beszélünk előrecsatolt szabályozásról, vagy más néven vezérlésről, ha a folyamat szabályozott jellemzőjét a folyamatot érő zavarás alapján szabályozzuk. Ekkor a zavarásnak megfelelően
Zavaras 2
Zavaras 1
Transfer Fcn 4 1 20 s+1 Transfer Fcn 3
1 10 s+1 Transfer Fcn 2
1 5s+1 Transfer Fcn 1
1 5s+1 Transfer Fcn
1 2s+1
Szabalyozott jel
Math Function
u2 Kulso PID
PID
Integrator 1 s
ISE Belso PID
PID
Alapjel
avatkozunk be a módosított jellemzőn keresztül úgy, hogy a szabályozott jellemző a kívánt értéken maradjon. Ehhez pontosan ismerni és mérni kell a kérdéses zavarást. A 27.16. ábra egy visszacsatolt és egy előrecsatolt szintszabályozást mutat be képi hatásvázlat segítségével.
a.)
b.)
27.16. ábra. Szintszabályozás visszacsatolt (a) és előrecsatolt (b) szabályozással, vezérléssel A jól működő előrecsatolt szabályozás jellemzői:
1. Az ismert és mért zavarás hatását azzal egyidejűleg ki lehet küszöbölni egy megfelelően megválasztott módosított jellemzővel, és a szabályozott jellemző így a kívánt értéken marad, abban nem lesznek ingadozások, vagy csak nagyon kicsit fog ingadozni. (A visszacsatolt szabályozókörnél mindig van ingadozás.)
2. Ehhez pontosan ismerni kell a folyamat és az előrecsatolt szabályozókör elemeinek matematikai modelljét. (A visszacsatolt szabályozókörnél elegendő a hozzávetőleges ismeret is.)
3. A helyesen beállított előrecsatolt szabályozókör mindig stabil lesz. (A visszacsatolt esetben lehet instabilis állapot is.)
4. Az előrecsatolt szabályozással csak az ismert és mért zavarás hatását lehet kiküszöbölni. (A visszacsatolt megoldás az összes ismert és ismeretlen zavarás hatását kiküszöböli.)
Az előrecsatolt szabályozást különösen lassú viselkedésű, nagy időállandójú folyamatok esetén használják, elsősorban azért, hogy a szabályozott jellemző ne térjen el sokáig a kívánt értéktől, mely visszacsatolt szabályozás esetén elkerülhetetlen.
Az előrecsatolt szabályozást, számos előnye ellenére, szinte sosem alkalmazzák egyedül, mert csak azon zavarások hatását képes kiküszöbölni, melyeket mérünk, és hatásukat pontosan ismerjük. Mivel nem várt zavarások szinte mindig felléphetnek, ezért az előrecsatolt szabályozást általában visszacsatolt szabályozással kombinálják.
A 27.17. ábra az általános előrecsatolt szabályozás hatásvázlatát, vagy más néven blokkdiagramját mutatja.
27.17. ábra. Az előrecsatolt szabályozás hatásvázlata
Az előrecsatolt szabályozókör esetében a jó szabályozás megvalósításához fontos feladat a szabályozó beállítása, mely itt más elvek szerint történik, mint a visszacsatolt szabályozókörben. Az előrecsatolt szabályozót úgy kell beállítani, hogy a szabályozott jellemző értéke lehetőleg ne változzon, vagyis, a 27.17. ábra alapján, Xc(s)=0 legyen, ami megfelel xˆc
t 0 -nak. Ez a 27.17. ábra alapján megfelel a következő azonosságnak (a zavarással azonos dimenziójú alapjelet állandónak vesszük, a szabályozó előtt különbségképző, előjelfordító van):) ( ) ( ) ( ) ( ) ( ) ( )
(s G s G s G s G s X s G s
XZ TA LL BE F Z Z .
Ebből az előrecsatolt szabályozó átviteli függvénye és annak paraméterei, vagyis a szabályozó beállítása pontosan meghatározható:
) ( ) ( ) (
) ) (
( G s G s G s
s s G
G
F BE TA
Z
LL .
Amint látható, előrecsatolt szabályozás esetében a szabályozókör és a szabályozott folyamat átviteli függvényei fogják eldönteni az alkalmazandó szabályozó átviteli függvényét.
Például ha a szabályozókör valamennyi eleme arányos tag, akkor a szabályozó is egy arányos tag lesz. Ebben az ideális esetben, mivel a szabályozókör elemeinek nincs időkésése, tökéletes szabályozás valósítható meg mind stacionárius, mind dinamikus szempontok szerint.
Ha a szabályozókör elemeinek időbeli viselkedése, késése van, akkor számos eset képzelhető el.
1. Ha a szabályozott folyamat zavarásra és módosított jellemzőre vonatkozó átviteli függvényei azonosak, akkor a szabályozó átviteli függvénye:
) ( ) ( ) 1
(s G s G s
G
BE TA
LL .
Ebben az esetben, ha pl. a távadó arányos tag (GTA(s)KTA) és a beavatkozó szerv pl.
szabályozó szelep, elsőrendű arányos tagként viselkedik (
) 1
(
s T s K G
BE BE
BE ), akkor a
szükséges előrecsatolt szabályozó átviteli függvénye
1
1 1
) 1
(
T s
K K s
T K K s
G BE
BE TA BE
BE TA
LL
alakú, ami egy PD szabályozónak felel meg.
2. Ha a szabályozott folyamat zavarásra és módosított jellemzőre vonatkozó átviteli függvényei nem azonosak, akkor a szabályozó átviteli függvénye
) ( ) ( ) (
) ) (
( G s G s G s
s s G
G
F BE TA
Z
LL
alakú lesz.
a.) A szabályozó átviteli függvényére csak abban az esetben kapunk megvalósítható megoldást, ha a folyamat zavarásra lassabban reagál, mint a módosított jellemzőre, vagyis a
G
Z(s )
átviteli függvény időállandói, illetve esetleges holtideje nagyobb, mint a) (s
G
F átviteli függvényben szereplő hasonló időállandók.b.) Abban az esetben, ha a folyamat zavarásra gyorsabban reagál, mint a módosított jellemzőre, vagyis a
G
Z(s )
átviteli függvény időállandói, illetve esetleges holtideje kisebbek, mint aG
F(s )
átviteli függvényben szereplő hasonló időállandók, akkor az előrecsatolt szabályozóra nem kapunk megvalósítható megoldást.Ez az eset a gyakorlatban ritkán fordul elő, hiszen az előrecsatolt szabályozást többnyire a lassú folyamatok szabályozása minőségének javítására használjuk.
Ha a megvalósítható előrecsatolt szabályozót (1. és 2.a esetek) a szabályozott folyamat stacionárius viselkedése, erősítési, illetve átviteli tényezői alapján terveztük meg, akkor javíthatjuk a szabályozás minőségét egy ún. siettető-késleltető tag alkalmazásával. A siettető-késleltető tagot a szabályozó után, annak részeként kapcsoljuk, és annak kimenőjelét, a végrehajtó jelet
xˆv(t)
változtatja az alábbi algoritmus szerint:
2
2 2 1 , () ˆ () 1
ˆ T
t v
LL
v e
T T t T
x t
x ,
ahol T1 és T2 időállandók a siettetés és a késleltetés jellemzői.
Az előrecsatoló szabályozó hangolása két jól elkülöníthető lépésből áll:
1. Be kell állítani a szabályozó erősítését (ALL).
2. Be kell állítani a szabályozó időállandóit (T1 és T2).
Legyen a távadó és a beavatkozó szerv egységnyi erősítésű arányos tag (GTA = 1; GBE = 1)! Legyen a mérhető zavaró jellemző (xz) és a szabályozott jellemző (xc) közti tag erősítési tényezője KZ, a módosított jellemző (xm) és a szabályozott jellemző (xc) közti tag erősítési tényezője pedig KF. A szabályozó erősítése (KLL) az ellenőrző jel (xe) és a végrehajtó jel (xv) közötti erősítést jelent, vagyis a szabályozón keresztül a zavarás és az ellenőrző jel közti erősítés -KLLKF (mivel a távadó és a beavatkozó szerv egységnyi erősítésű arányos tag, és a szabályozó előtt van egy előjelfordító). A két út párhuzamos; az együttes erősítés a két párhuzamos ág összege. Célunk, hogy a zavarás hatását kiküszöböljük, vagyis
xc = (-KLLKF + KZ) = 0 legyen. Innen
F Z
LL K
K K .
Ez az érték az időállandóktól független. Ha más erősítést állítunk be, akkor a zavaró jel hatását nem küszöböljük ki.
Ha a folyamatnak van időbeli viselkedése, akkor az időállandókat is be kell állítani. Shinskey szerint T1 és T2 beállítása próbálkozással történik úgy, hogy a szabályozott jellemző a tranziens sza- bályozás során lehetőleg azonos mértékben térjen el a kívánt értéktől mind a pozitív, mind a negatív irányban, azaz a pozitív és negatív kitérés görbe alatti területe azonos legyen (lásd 27.18. ábra).
27.18. ábra. T1 és T2 beállítása Shinskey szerint; (a) nincs időkompenzáció, (b) kevés, (c) jó A mérés során az időállandókat úgy állítjuk be, hogy az ellenőrző jel időleges eltérése minél kisebb legyen. Optimálisnak tekintjük azt a beállítást, amely esetén a négyzetes hibaintegrál minimális:
0
2d )
(t x t
x
ISE e a ,
ahol xa az alapjel. Ez egy kétváltozós szélsőérték-keresési feladat. A belengetés közel optimális hangoláshoz hasonló javasolt beállítás nem ismert. A gyakorlati részben írjuk le, hogyan lehet a kétváltozós keresést viszonylag rövid idő alatt végrehajtani.
A mérés célja
1. Előrecsatolt szabályozó közel optimális hangolása.
2. Visszacsatolt szabályozókör PI szabályozójának hangolása belengetéssel, Ziegler–Nichols-táblázat szerint.
3. Háromféle szabályozó rendszer, nevezetesen a visszacsatolt kör előrecsatolás nélkül, az előrecsatolt szabályozás visszacsatolás nélkül, és a visszacsatolással kombinált előrecsatolt szabályozás működésének összehasonlítása kétféle zavarás esetén, nevezetesen csak mért zavarás esetén, és csak nem mért zavarás esetén (vagyis összesen 6 esetben). Az összehasonlítás azonos mértékű ugrásokra, az 1. és a 2. pontban beállított értékekkel, a hibanégyzet-integrál, a szabályozási idő, a maximális kitérés és a maradó eltérés értékeinek összehasonlításával történik.
A mérés leírása
Töltse be a FIR05_elore.mdl nevű hálózatot! A visszacsatolással kombinált előrecsatolt szabályozó rendszer vázlatát a 27.19. ábra mutatja. Egyszerűsíthetjük a feladatot, ha feltétlezzük, hogy a távadó és a beavatkozó egységnyi erősítési/átviteli tényezőjű tag, illetve annak feltételezhető. Azaz
G
TA s 1 ,
és
G
BE s 1
. A mérhető zavarás jele xz, az idegen (nem mért) zavarás jele xzi, mivel az idegen zavarás hatását a módosított jellemzőre jutó zavarásként modellezzük. Ennek megfelelően GZ a vizsgált szakasz átviteli függvénye (szabályozó nélkül) xz és xc között, GF pedig a vizsgált szakaszátviteli függvénye xm és xc között. A siettető-késleltető tagot egy sorba kapcsolt egytárolós és PD kaszkád modellezi. ha feltételeztük, hogy a beavatkozó szerv és a távadó egységnyi erősítésű arányos tag, akkor ezeket nem kell a modellbe illeszteni. A visszacsatolt szabályozó egy PI egység. A hálózatban szerepel a hibajel négyzetre emelése és a négyzet integrálása is. Scope egységet illesztettünk a szabályozott jelhez és a hibanégyzet-integrálhoz. Ugrászavarásokat kapcsoltunk (1) xz
megadása céljából GZ és P1-PD elé, (2) az idegen zavarás (xzi) modellezése céljából a módosított jellemzőhöz, és (3) a visszacsatolt szabályozó alapjelének megadásához PI elé.
A modellben feltételezzük, hogy T1 és T2 értéke csak 1,0 és 50,0 időegység között változtatható!
27.19. ábra. Visszacsatolással kombinált előrecsatolt szabályozás hatásvázlata 1. Az előrecsatolt szabályozó hangolása
1.1. Statikus azonosítás és az előrecsatolt szabályozó statikus beállítása
1. A módosított jellemző bemenetén adjon meg nulla értéket (xzi = 0), a mérhető zavarásra adjon xz = 0,1 értékű ugrást, és azt csak a GZ részen átvezetve mérje meg xc statikus válaszát! Határozza meg az AZ statikus erősítést!
2. Nulla mérhető zavarás (xz = 0) biztosítása mellett a módosított jellemzőre adjon xzi = 0,1 értékű ugrás-zavarást, és mérje meg xc statikus válaszát! Határozza meg az AF statikus erősítést!
3. A fenti két erősítésből számítsa ki az előrecsatolt szabályozó erősítését, (ALL) és az előrecsatolt szabályozó kaszkád P1 tagjának erősítését ennek megfelelően állítsa be!
4. Nulla idegen zavarást biztosítva (xzi = 0) vezesse a mérhető zavarás pozitív ugrását (xz = 0,1) mind a GZ szakaszra, mind az előrecsatolt szabályozó helyén álló arányos taghoz! Mérje meg a szabályozott jel válaszát, és ellenőrizze, hogy valóban nullához tér-e vissza!
1.2. Dinamikus azonosítás és az előrecsatolt szabályozó kezdeti hangolása
1. A módosított jellemző bemenetén adjon meg nulla értéket (xz i= 0), a mérhető zavarásra adjon xz = 0,1 értékű ugrást, és azt vezesse mind a GZ szakaszra, mind az előrecsatolt szabályozóra (a PD szabályozó P tagjának erősítése legyen 1, az I és D tag erősítése pedig 0)! Mérje a szabályozott jel válaszát az idő függvényében! A kapott görbe valószínűleg egy irányban tér el nullától, és egyetlen maximum elérése után lassan visszatér a kezdeti nulla értékhez.
2. Olvassa le a maximum helyét! Jelöljük ezt az időértéket tp-vel!
3. Az előrecsatolt szabályozóban legyen a PD szabályozó P tagjának erősítése 1 (és ez mindig maradjon ennyi)! Legyen a P1 tag erősítése a siettető-késleltető tag kiszámított ALL értéke! Legyen T1–nek (vagyis a PD szabályozó D tagjának erősítésének) értéke 1,5tp, és T2-nek (vagyis a P1 tag időállandójának) értéke 0,7tp!
4. Mérje meg az ellenőrző jel időfüggését! Szerencsés esetben a görbe egyszer metszi a vízszintes tengelyt. Ha nem, cserélje meg T1 és T2 értékét, és ismételje meg a mérést! Ha így sem kap egyszeri metszést, akkor az ahhoz jobban közelítő esetben T1 és T2 apró változtatásaival keressen egy ilyen esetet!
Az előrecsatolt szabályozó időállandóinak optimális hangolása
A kétváltozós és korlátos (1 és 50 közötti értékek állíthatók csak be) szélsőérték-keresést, azaz optimalizálást Gauss–Siedel algoritmussal végezzük el. Az optimalizálás során nem használjuk Shinskey észrevételét, hanem célunk a négyzetes integrálkritérium minimalizálása.
A Gauss–Siedel algoritmus lényege, hogy a többváltozós keresést egyváltozóssá egyszerűsítjük úgy, hogy csak egy kiválasztott keresési változó értékét változtatva keressük a célfüggvény mini- mumát, míg a többi változó értékét rögzítjük. Ha megtaláltuk a minimumot, akkor az aktuális keresési változó értékét rögzítjük, és egy másik változó szerint folytatjuk a keresést. A keresést addig foly- tatjuk, míg két egymás utáni ciklusban (azaz mikor kétszer ugyanaz a változó volt a keresési változó) a célfüggvény értékének változása kisebb, mint egy előre meghatározott érték, jelen esetben 5%.
Több változó esetén a változókat valamilyen szempont szerint rangsoroljuk, és mindig ezen sorrend alapján választjuk ki a keresési változót. Kétváltozós optimalizálásnál ez egyszerűbb, hiszen ha az aktuális keresési változó szerint megtaláltuk az optimumot, akkor csak a másik változó lehet a következő keresési változó.
A Gauss–Siedel algoritmus lépései kétváltozós optimalizálás esetén a következők:
1. Legyen az optimalizálás kiindulópontja az előző fejezetben meghatározott T1 és T2 érték!
2. Válassza ki az egyik változót, amelyik a keresési változó lesz! A másik változó értékét rögzítse!
3. Keresse meg, hogy a keresési változó mely értékénél lesz a célfüggvény, azaz a négyzetes integrálkritérium értéke a minimális! A keresés során elegendő a változók félre kerekített értékeit vizsgálni, ennél pontosabb keresésre most nincs szükség. Jegyezze fel a jegyzőkönyvbe az így megtalált értékeket!
4. Vizsgálja meg a célfüggvényt, azaz a négyzetes integrálkritérium aktuális, illetve az előző ciklusban kapott értékét! Ha a célfüggvény aktuális értéke az előző ciklus (azaz mikor legutoljára az a változó volt a keresési változó, mint jelenleg) értékétől kevesebb, mint az előző érték 5%-ával tér el, akkor a megtalált pont az optimum. Ha ez eltérés ettől nagyobb, akkor rögzítse a keresési változó értékét, legyen a másik változó a keresési változó, és folytassa az optimalizálást a 3.
ponttól!
2. A visszacsatolt szabályozó hangolása
Ideiglenesen törölje ki az előrecsatolt szabályozó végrehajtó jelét! Állítsa vissza a visszacsatolt szabályozó végrehajtó jelét! Állítsa be a visszacsatolt szabályozót belengetéssel, a Ziegler–Nichols táblázat szerinti optimális PI szabályozó értékeihez!
3. Összehasonlítás
Vizsgálja meg az egyes szabályozásokat (előrecsatolt, visszacsatolt és kombinált szabályozás) a zavaró jelek kétféle állásában: a) xz = 0,1, xzi = 0; b) xz = 0, xzi = 0,1! Hasonlítsa össze a szabályozásokat az integrálkritérium (ISE), a maradó eltérés (yme), a szabályozási idő (Tszab) és a maximális túllendülés (ymax) alapján! A szabályozási idő leolvasásakor a végértéktől legfeljebb
±0,005 eltérést engedünk meg.
Beadandó
1. Az előrecsatolt szabályozó hangolása 1.1. Statikus beállítás
Az előrecsatolt szabályozó erősítésének megállapításához leolvasott és számított jellemzők értéke.
1.2. Dinamikus beállítás
Az előrecsatolt szabályozó időállandóinak megállapításához leolvasott jellemzők értéke.
2. A visszacsatolt PI szabályozó hangolása
A visszacsatolt szabályozó hangolásához leolvasott és számított jellemzők értéke.
3. Összehasonlítás
A szabályozások összehasonlítása a hibanégyzet-integrál (ISE), a szabályozási idő (Tszab), a maximális túllendülés (ymax) és a maradó eltérés (yme) szerint.
4. Értékelés
A leolvasott értékek alapján melyik szabályozást célszerű alkalmazni, és miért?
27.1.6. Szabályozókörök kölcsönhatása Elméleti bevezető
A gyakorlatban sűrűn fordulnak elő olyan többváltozós rendszerek, melyeknek több paraméterét kell egyidejűleg szabályozni. Ilyenkor, ha pl. n paramétert akarunk szabályozni, vagyis n szabályozott jellemzőnk van, akkor ennek egyik előfeltétele, hogy a szabadsági fokok vizsgálatával minimum n vagy több egymástól függetlenül változtatható módosított jellemzőt találjunk, melyek hatással lesznek a szabályozott jellemzőkre. Az így előálló szabályozó rendszer egy több bemenetű több kimenetű rendszer lesz (multiple input multiple output, MIMO). Az ilyen rendszerek szabályozását a gyakorlatban sokszor decentralizált szabályozási struktúrával oldják meg, vagyis a többváltozós n×n- es rendszert n darab egy bemenetű egy kimenetű szabályozókörré (single input single output, SISO) dekomponálják, és az egyes szabályozott jellemzőkhöz megkeresik a megfelelő módosított jellemzőt.
A megfelelő módosított és szabályozott jellemzők párosítása (pairing) során figyelembe kell venni, hogy a módosított jellemzővel a szabályozott jellemző jól szabályozható legyen, és az egyes szabályozókörök között lehetőleg ne, vagy minimális legyen a kölcsönhatás.
A kölcsönhatás azt jelenti, hogy ha egy többváltozós rendszer esetében a rendszer bármely bemenő jelét (módosított jellemző) megváltoztatjuk, akkor az valamilyen hatással lesz a rendszer valamennyi kimenőjelére (szabályozott jellemzők), vagyis a szabályozókörök közt kölcsönhatás lesz. A szabályozókörök közti kölcsönhatás tehát a szabályozott folyamat belső összefüggései miatt jön létre.
A decentralizált szabályozási struktúra kialakításánál tehát gondosan ügyelni kell arra, hogy olyan módosított jellemző – szabályozott jellemző párosítást hozzunk létre, melynél a módosított jellemző lehetőleg csak a vele egy szabályozókörben lévő szabályozott jellemzőre legyen hatással, vagyis ne legyen kölcsönhatásban a többi szabályozókörrel.
A kölcsönhatás megállapításának lényege, hogy minden szabályozókört megvizsgálunk úgy, hogy az összes többi szabályozókör kikapcsolt, manuális állásban van, és úgy is, hogy a többi szabályozókör bekapcsolt állásban van. Ha a vizsgálat azt mutatja, hogy a kérdéses szabályozókör viselkedése nem változik a többi szabályozókör bekapcsolt, illetve kikapcsolt állapotakor, akkor nincs, vagy alig van kölcsönhatás. Ennek a vizsgálatnak egyik igen fontos módszere a relatív erősítési tényezők (relative gain array) módszere. Ennek lényege a 27.20. ábrával magyarázható egy 2×2-es rendszerre.
27.20. ábra. Szabályozókörök közötti kölcsönhatás 2×2-es rendszerre
Az ábrán látható mindkét szabályozókört kikapcsoljuk. Zavarást adunk az első szabályozó körben lévő egységre (xm1), és megmérjük a folyamat mindkét kimenőjelének változását (xc1 és xc2).
Ebből megállapíthatók a stacionárius átviteli tényezők. Az első szabályozott jellemzőre:
állandó ˆ ,
ˆ
2 1
1 1 1
11 m
m c m
c x
x x x a x
,
illetve határesetben:
1 2 1 11
xm m c
x a x
.
Második lépésben bekapcsoljuk a második szabályozókört, és ismét ugyanakkora zavarást adunk a rendszerre, mint az első lépésben. Megállapítjuk most is az átviteli tényezőket. Az első szabályozott jellemzőre:
állandó ˆ ,
ˆ
2 1 1 1 1
11 c
m c m
c x
x x x b x
,
illetve határesetben:
1 2 1 11
xc m
c
x
b x
.
A relatív erősítési tényező a két átviteli tényező hányadosa, jele λ:
11 11
1 2 1 1 2 1
11 b
a x
x x x
xc m
c xm m c
.