Development of Complex Curricula for Molecular Bionics and Infobionics Programs within a consortial* framework**
Consortium leader
PETER PAZMANY CATHOLIC UNIVERSITY
Consortium members
SEMMELWEIS UNIVERSITY, DIALOG CAMPUS PUBLISHER
The Project has been realised with the support of the European Union and has been co-financed by the European Social Fund ***
**Molekuláris bionika és Infobionika Szakok tananyagának komplex fejlesztése konzorciumi keretben
***A projekt az Európai Unió támogatásával, az Európai Szociális Alap társfinanszírozásával valósul meg.
Digital- and Neural Based Signal Processing &
Kiloprocessor Arrays
Spectral analysis and filter design
Digitális- neurális-, és kiloprocesszoros architektúrákon alapuló jelfeldolgozás
Spektrálanalízis és szűrőtervezés
dr. Oláh András
Outline
• Spectral analysis of signals
• Frequency-domain sampling and DFT
• Efficient computation of DFT: Fast Fourier Transformation (FFT)
• The radix-2 FFT
• Spectral shaping of signals: filtering
• Digital filter design
• Linear-Phase FIR filters using windows
Spectral analysis of signals
• The Fourier transfom (and Fourier series) is an important mathematical tools that is useful in the analysis and design of LTI systems.
• Frequency analysis is most conveniently performed on a digital signal processor.
A/D Linear
DSP
x(n)
x(t) XC(ω)
x(t) x(n) xp(n)
XC(ω) X(ω) X(k)
FT DTFT
DFT sampling
sampling per. rep.
per. rep.
FS
Frequency-domain sampling
• Since X( ω ) is periodic with period 2 π , only samples in the fundamental frequency range are necessary. We take N equidistant samples in the interval 0 ≤ ω < 2 π with spacing δω =2 π /N, as shown in next figure.
ω X(ω)
-π π 2π
X(k·δω)
k·δω δω
Frequency-domain sampling (cont’)
• If we evaulate the DTFT X(ω) at ω=2πk/N, we obtain
where the summation is subdivided into an infinite number of summations, which from we change the index in the inner summation from n to n-lN and interchange the order of the summation:
for k=0,1,2,...,N-1 .
( )
( ) ( ) ( )
( )
2 /
1 1 2 1
2 / 2 / 2 /
0 1
2 /
2
... ...
,
j kn N n
N N
j kn N j kn N j kn N
n N n n N
lN N
j kn N l n lN
X k x n e
N
x n e x n e x n e
x n e
π
π π π
π
π ∞ −
=−∞
− − −
− − −
=− = =
∞ + −
−
=−∞ =
= =
= + + + +
=
∑
∑ ∑ ∑
∑ ∑
( ) ( )
1 1
2 / 2 /
0 0
2 N j kn N N j kn N
p
n l n
X k x n lN e x n e
N
π π
π − ∞ − − −
= =−∞ =
= − =
∑ ∑ ∑
Frequency-domain sampling (cont’)
• The xp(n) is the periodic repetition of x(n) every N samples, it can be expanded in a Fourier series as
with Fourier coefficients
Therefore
It provides the reconstruction of the periodic signal xp(n) from the samples of the spectrum X(ω).
( )
1 2 /0 N
j kn N
p k
k
x n c e π
−
=
=
∑
n =0,1,....,N −11
( )
2 /
0
1 1 2
,
N
j kn N
k p
n
c x n e X k
N N N
π π
− −
=
= =
∑
( )
1 2 /0
1 N 2 j kn N
p
k
x n X k e
N N
π π
−
=
=
∑
0,1,...., 1
k = N −
0,1,...., 1
n = N −
Frequency-domain sampling (cont’)
• If we consider a finite-duration sequence x(n), which is nonzero in the interval 0≤ n ≤L-1, and N ≥ L so that x(n) can be recovered from xp(n) without ambiguity. If N < L it is not possible due to time-domain aliasing.
x(n)
n L
xp(n)
n L
xp(n)
n N
N ≥ L N < L
N
aliasing no aliasing
Frequency-domain sampling (cont’)
• Assume that N ≥ L, since x(n) = xp(n) for 0≤ n ≤N-1 we obtain
• We can compute
• where P(ω) is the basic interpolation function:
( )
1 2 /0
1 N 2 j kn N
k
x n X k e
N N
π π
−
=
=
∑
( )
1 1 2 / 1 1 ( 2 / )0 0 0 0
1 0
1 2 2 1
2 2
N N N N
j k N n
j kn N j N
n k k n
N
k
X X k e e X k e
N N N N
X k P k
N N
π ω ω π
π π
ω
π ω π
− − − −
− −
−
= = = =
−
=
= = =
= −
∑ ∑ ∑ ∑
∑
( ) ( )
( )
( )1
1 / 2 0
sin / 2
1 1 1
1 sin / 2
N j N
j N j n
j n
e N
P e e
N N e N
ω ω
ω
ω
ω ω
ω
− −
− −
−
= −
= = − =
∑
−Frequency-domain sampling (cont’)
• We observe that the function has the property
• Consequently the interpolation formula gives exactly the sample values X(2πk/N) for ω=2πk/N and all other frequencies it provides a properly weigthed linear combination of the original spectral samples.
1 0
2
0 1, 2,..., 1 P k k
k N
N
π =
=
= −
A/D DFT
X(2πk/N)
P( ω )
x(n)
x(t) X(ω)
Interpolation
Real time operation
The Discrete Fourier Transform (DFT)
• The formulas for the DFT and IDFT may be expressed as
where WN is an Nth root of unity.
• Let us define an N-point vector xN of the signal sequence x(n) and an N-point vector XN of frequency samples, and an NxN matrix WN as
( ) ( )
1 1
2 /
0 0
2 − − −
= =
= =
∑
N j kn N∑
N Nknn n
X k x n e x n W
N π π
( )
1 2 / 10 0
1 − 2 1 − 2 −
= =
= =
∑
N j kn N∑
N Nknk k
x n X k e X k W
N N N N
π π π
0,1,..., 1
= −
n N
0,1,..., 1
= −
k N
( ) ( )
( )
0 1
1
=
−
N ⋮
x x x N x
( ) ( )
( )
0 1
1
=
−
N ⋮
X X X N
X ( )
1 2 1
2 1
2 4
1 1 1 1
1 1
−
−
=
⋯
⋯
⋯
⋮ ⋮ ⋮ … ⋮
N
N N N
N
N N N N
W W W
W W W
W
The DFT as a linear transformation
• The N-point DFT may be expressed in matrix form as
• where WN is the matrix of the linear transformation. We observe that WN is a Vandermonde type matrix with the following properties:
– det(W)≠0 (→the inverse exists: W-1=1/N·W*, where W* denotes the complex conjugate of the matrix W)
– WNk+N = WNk – WNk+N/2 = -WNk – WNkM = WN/Mk
• The N-point IDFT may be expressed in matrix form as
N = N N
X W x
1 *
N = N N
x N W X
Example
• Compute the DFT of the four-point sequence x(n)=[0 1 2 3].
• The first step is to determine the matrix W4
• Then the solution is
1 2 3 1 2 3
4 4 4 4 4 4
4 2 4 6 2 0 2
4 4 4 4 4 4
3 6 9 3 2 1
4 4 4 4 4 4
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1
1 1 1 1 1 1
1 1 1 1
− −
= = = − −
− −
W W W W W W j j
W W W W W W
W W W W W W j j
W
4 4 4
6 2 2
2 2 2
− +
= = −
− − j j X W x
DFT applications
• The DFT and IDFT are computational tools that play a very important role in many digital signal porcessing applications:
– Frequency analysis of signals – Power spectrum estimation
– Linear filtering methods based on the DFT – Discrete Cosine Transform
– in OFDM communication technology – and so on
Efficient computation of DFT
• The goal: we need to speed up the DFT calculation according to the real-time requirement.
• Measures of computational efficiency in general:
– Number of additions
– Number of multiplications – Amount of memory required – Scalability and regularity
• For the present discussion we’ll focus most on number of multiplications as a measure of computational complexity
– More costly than additions for fixed-point processors
– Same cost as additions for floating-point processors, but number of operations is comparable
Fast Fourier Transformation
• What is the FFT?
– A collection of “tricks” that exploit the symmetry of the DFT calculation to make its execution much faster.
– Speedup increases with DFT size.
• History
– ~1880 - algorithm first described by Gauss
– 1965 - algorithm rediscovered (not for the first time) by Cooley and Tukey – 1984 - Split-radix FFT is due to Duhamel and Hollmann
• The development of computationally efficient algorithms for DFT
is made possible if we adopt a „divide-and-conquer” approach.
Divide-and-conquer approach
• N is factored as a product of two integers: N=LM
• The sequence x(n) can be stored as a two-dimensional array indexed by l and m:
• We use colunm-wise mapping for x(n) :
x(0) x(L) x(2L) ... x((M-1)·L)
x(1) x(L+1) x(2L+1) ... x((M-1)·L+1) x(2) x(L+2) x(2L+2) ... x((M-1)·L+2)
... ... ... ... ...
x(L-1) x(2L-1) x(3L-1) ... x(LM-1)
m
0
L-1 . . .
0 . . .
l
M-1Divide-and-conquer approach (cont’)
• The DFT X(k) can be stored as well as a two-dimensional array indexed by p and q:
• We use row-wise mapping for X(k) : K=M·p + q
X(0) X(1) X(2) ... X(M-1)
X(M) X(M+1) X(M+2) ... X(2M-1)
X(2M) X(2M+1) X(2M+2) ... X(3M-1)
... ... ... ... ...
X((L-1)·M) X((L-1)·M+1) X((L-1)·M+2) ... X(LM-1)
q
p
0
L-1 . . .
0 . . . M-1
Divide-and-conquer approach (cont’)
• With these simplification it can be expressed as
It involves the computation of DFTs of length M and length L.
• We can subdivide the computation into three steps.
( )
1 1( )
( )( ) 1 1( )
0 0 0 0
, , ,
M L M L
Mp q mL l MLmp mLq Mpl lq
N N N N N
m l m l
X p q x l m W x l m W W W W
− − − −
+ +
= = = =
=
∑∑
=∑∑
MLmp Nmp 1
N N
W =W = / WNMpl =WN Mpl/ =WLpl
mqL mq mq
N N L M
W =W =W
( )
1 1( )
0
, ,
L M
lq pq lp
N M L
m l m
X p q W x l m W W
− −
= =
=
∑ ∑
1 2
3
Divide-and-conquer approach (cont’)
1. First, we compute L times the M-point DFTs:
2. We compute the multiplications:
3. Finally, we compute M times the L-point DFTs:
( )
1 1( )
0 0
, ,
L M
lq pq lp
N M L
l m
X p q W x l m W W
− −
= =
=
∑ ∑
1 2
3
( )
1( )
0
, ,
M
pq M m
F l q x l m W
−
=
=
∑
0 ≤ ≤q M −1( )
, Nlq( )
,G l q =W F l q 0≤ ≤q M −1 0≤ ≤ −l L 1
( )
1( )
0
, ,
L
lp L l
X p q G l q W
−
=
=
∑
0 ≤ ≤ −l L 1
Divide-and-conquer approach (cont’)
• The computational complexity is
– Complex multiplication:
– Complex additions:
• For example, N=M·L=500·2, then instead of to perform 10
6complex multiplications via direct computation of DFT, this method leads to 503.000 complex multiplication that represents a reduction by about a factor of 2.
• If N can be factored into a product of prime numbers of the form N=i
1·i
2·... · i
ν( ) ( )
2 2 2
1 1
L M⋅ + ⋅L M + M L⋅ = ML M + + =L N M + + <L N
1 2 3
(
1)
0(
1) (
2) (
1)
L⋅ M − M + +M L − L = N M + − <L N N −
1 2 3
Radix-2 FFT algorithms
• Of particular importance is the case in which N=rν, where number r is called the radix of the FFT algorithm. The most widely used FFT algorithms are the Radix-2 algorithms.
• The total number of complex multiplication is N/2·log2(N) and the complex additions is N·log2(N). The complexity reduction is compared in the table:
N α=N2/[N/2·log2(N)]
16 8
32 12.8
64 21.3
128 36.6
256 64
512 113.8
1024 204.8
Decimation-in-time radix-2 FFT algorithms
• The decimation-in-time based on the decimation of the data sequence which can be repeated again and again until the resulting sequences are reduced to one-point. The basic computation (2-point DFT) is the basic butterfly :
• Where the signal flowgraph notation describes the three basic DSP operations:
– Addition
– Multiplication by a constant – (and delay)
a
b
-1
r
WN
r
A= +a W bN
r
B= −a W bN
Three stages in the computation of an N=8-point DFT
2-point DFT
2-point DFT
2-point DFT
2-point DFT
Combine 2-point DFT’s
Combine 2-point DFT’s
Combine 4-point DFT’s
x(0) x(4)
x(2) x(6)
x(1) x(5)
x(3) x(7)
X(0) X(1) X(2) X(3) X(4) X(5) X(6) X(7)
8-point decimation-in-time FFT
• Eg.: x(n)=[1 1 1 1 0 0 0 0]
Spectral shaping of signals: filtering
• In the filter design process, we determine the coefficients of a causal FIR (or IIR) filter that closely approximates the H
d( ω ) desired frequency response specifications.
H
d( ω ) H( ω ) h(n)
desired approximation
Implementation on FIR (or IIR) architecture
Filter
( )
x n h n
( )
y n( ) ( ) ( )
= h n ∗x n( ) ( )
j nn
X ω ∞ x n e− ω
=−∞
=
∑
( ) ( )
j nn
H ω ∞ h n e− ω
=−∞
=
∑
( ) ( )
j n( ) ( )
n
Y ω ∞ y n e− ω H ω X ω
=−∞
=
∑
=Filter types
Lowpass filter Highpass filter
ω X(ω) Hd(ω)
X(ω) Hd(ω)
ω X(ω) Hd(ω)
X(ω) Hd(ω)
Lowpass filter
• The impulse response hd(n) of an ideal lowpass filter with frequency response characteristic
• The impulse response of this filter is
• Problems:
– Causality
– Infinite in duration (FIR implementation?)
( ) ( )
cc
c c
d d
c
sin
1 1
2 2
j n j n n
h n H e d e d
n
π ω
ω ω
π ω
ω ω
ω ω ω
π − π − π ω
=
∫
=∫
=( )
cd
c
1
H 0 ω ω
ω ω ω π
≤
=
< ≤
Noncausal
It is phisically unrealizable!
Note: IIR has stability problems.
Paley-Wiener Theorem
• What are the necessary and sufficient conditions that a frequency response characteristic H( ω ) must satisfy in order for the resultiong filter to be causal?
• If h(n) has finite energy and h(n)=0 for n<0, then
Conversely, if |H( ω )| is square intergarble and if the integral is finite, then we can associate |H( ω )| with a phase response Θ ( ω ), so that the resulting filter with frfequency response
( ) ( )
j ( )H ω = H ω e
Θ ω( )
ln H d
π
π
ω ω
−
< ∞
∫
Characteristics of phisically realizable filters
• Problem: Given δ
1
, δ
2
, ω
p
and ω
s
, find the lowest complexity filter that meets specification, according to
( )
H ω
( )
( )( ) ( )
2opt
min
dH
HH H d
π ω π
ω ω ω ω
−
= ∫ −
Digital filter design
• Approaches:
– Linear-Phase FIR filters using windows → our subject – Linear-Phase FIR filters by the frequency-sampling method – Optimum equiripple linear-phase FIR filters
– Design of IIR filters from analog filters
• design by approximation of derivatives
• design by impulse invariance
• design by the bilinear transformation
Linear-Phase FIR filters using windows
• In this method we begin with the desired frequency response specification H
d( ω ) and determine the corresponding impulse response h
d(n). Indeed, h
d(n) is related to H
d( ω ) by the Discrete Time Fourier Transformation (DTFT):
• For example in the case of ideal lowpass filter:
( )
c cd
c
sin n
h n n
ω ω
= π ω
( ) ( )
d d
1 2
h n H e
j nd
π ω
π
ω ω
π
−= ∫
c 4
ω =π
Linear-Phase FIR filters using windows
• The impulse response h
d(n) is infinite in duration and must be truncated at some point, say at |n|=(M-1)/2, to yield an FIR filter of length M.
• Truncation is equivalent to multyplying h
d(n) by a „rectangular window”, defined as
• Thus the impulse response ot the FIR filter becomes
( )
d( ) ( )
Rh n = h n w n
( )
R
1 1
2 0 otherwise
n M w n
−
≤
=
Illustration
( )
d( ) ( )
Rh n = h n w n
( )
R
1 1
2 0 otherwise
n M w n
−
≤
=
c 4
ω =π
( )
c cd
c
sin n
h n n
ω ω
= π ω
11 M =
Linear-Phase FIR filters using windows
• To realize an causal FIR filter we need a delay (M-1)/2:
• Clearly, g(n) is noncausal and infinite in duration.
( )
12 g n h n M −
= −
The effect of the window function
• Recall that multiplication of the window function w
R(n) with h
d(n) is equivalent to convulation of H
d( ω ) with W
R( ω ):
where W
R( ω ) is the DTFT of the rectangular window:
( ) 1
d( ) ( ) ,
H 2 H W d
π
π
ω ν ω ν ν
π
−= ∫ −
( ) ( ( ) )
( )
1 2
1 2
sin 1 / 2
sin / 2
M
j n n M
W e
ωω M
ω ω
−
−
=− −
= ∑ = +
The effect of the window function
( )
Hd ω
( )
WR ω
( )
H ω
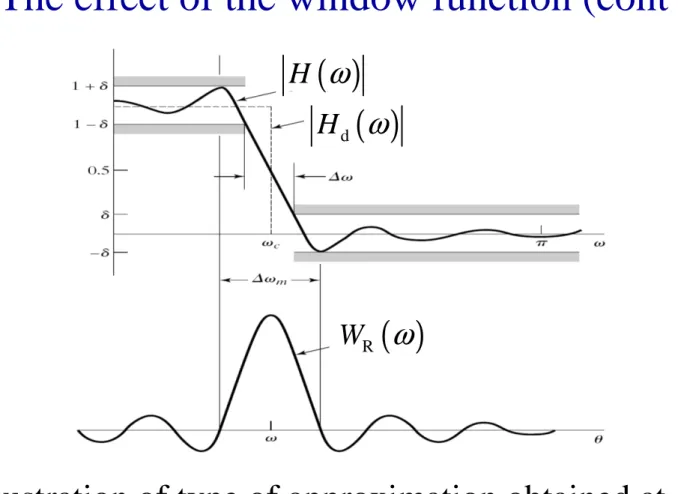
The effect of the window function (cont’)
( )
Hd ω
( )
H ω
( )
WR ω
Illustration of type of approximation obtained at
a discontinuity of the ideal frequency response.
The rectangular window
Main Lobe Width: 4π/(M+1) Sidelobe Magnitude= -13 db Stopband Attenuation=-21db
The rectangular window
( ) M=51
20 lg WR ω
Gibbs phenomena
( )
H ω H
( )
ω( )
H ω H
( )
ωWindow functions for FIR filter design
• The Gibbs effect is alleviated by the use of windows that do not contain abrupt discontinuities in their time-domain characteristics w(n), and have correspondingly low sidelobes in their frequency- domain characteristics W( ω ).
• Some window functions that posses desirable Gibbs phenomena:
– Bartlett window – Hamming window – Hanning window – Blackman window – ...
Bartlett window
M=11
2 4 6 8 10
0 0.2 0.4 0.6 0.8 1
Amplitude
Time domain
0 0.2 0.4 0.6 0.8
-120 -100 -80 -60 -40 -20 0 20
Magnitude (dB)
Frequency domain
( ) ( ) ( )
B R R
W ω =W ω W ω wB
( )
n = wR( )
n ∗wR( )
n( )
B
2 1 1 2
1 n M
w n
M
− −
= − −
Hanning window
M=11
2 4 6 8 10
0 0.2 0.4 0.6 0.8 1
Samples
Amplitude
Time domain
0 0.2 0.4 0.6 0.8
-80 -60 -40 -20 0 20
Normalized Frequency (×π rad/sample)
Magnitude (dB)
Frequency domain
( ) ( )
H R R R
4 4
1 1
W aW bW bW
M M
π π
ω = ω + ω − + ω +
− −
( )
H
0.5 0.5cos 2
1 w n n
M
= − π
−
Hamming window
M=11
( ) ( )
H R R R
4 4
1 1
W aW bW bW
M M
π π
ω = ω + ω − + ω +
− −
( )
H
0.54 0.46 cos 2
1 w n n
M
= − π
−
2 4 6 8 10
0 0.2 0.4 0.6 0.8 1
Amplitude
Time domain
0 0.2 0.4 0.6 0.8
-120 -100 -80 -60 -40 -20 0 20
Magnitude (dB)
Frequency domain
Blackman window
M=11 ( )
Bl
2 4
0.42 0.5cos 0.08cos
1 1
n n
w n
M M
π π
= − +
− −
2 4 6 8 10
0 0.2 0.4 0.6 0.8 1
Samples
Amplitude
Time domain
0 0.2 0.4 0.6 0.8
-140 -120 -100 -80 -60 -40 -20 0 20
Normalized Frequency (×π rad/sample)
Magnitude (dB)
Frequency domain
Important characteristics of some window functions
Window Type Peak Sidelobe Amplitude
(relative) [dB]
Approximate Width of Mainlobe
Peak
Approximation error 20 logδ
[dB]
Rectangular -13 4π/(M+1) -21
Bartlett -25 8π/(M+1) -25
Hanning -31 8π/(M+1) -44
Hamming -41 8π/(M+1) -53
Blackman -57 12π/(M+1) -74
Windows based FIR filter design
• Given δ
1
, δ
2
, ω
p
and ω
s
1. Compute
2. Compute 20lg( δ ) and select window type
3. Choose the filter order M, to meet transition width 4. Filter coefficients are given by
s
p
ω
ω ω
δ δ δ
−
=
∆
= min(
1,
2)
( )
d( ) ( )
Rh n = h n w n
c 2
p s
ω
=ω ω
+( ) ( )
d d
1 2
h n H e
j nd
π ω
π
ω ω
π
−= ∫ where
( )
12 g n h n M −
= −
Implemetation on
FIR architecture
Pros and Cons of Window based Design
• Advantages
– Easy to design
– Can be applied to general linear system design
• Disadvantages
– Exceeds the specs everywhere except at the edges of the passband and stopband
– δ
1, δ
2, cannot be independently controlled. Have to design more conservatively for the smaller of the two.
:
Summary
• We developed the DFT by sampling the spectrum X(ω) of the sequence x(n).
• We developed the structure of the basic decimation-in-time FFT.
• Use of the FFT algorithm reduces the number of multiplications required to perform the DFT by a factor of more than 100 for 1024-point DFTs, with the advantage increasing with increasing DFT size.
• We have described the FIR filters design using windows. Historically, it was the first proposed method for FIR design. Its major disadvantage is the lack of precise control of design parameters.
• As a general rule, FIR filters are used in applications where there is a need for a linear-phase filter.
Next lecture: Adaptive signal processing