INTEGRATION OF FREE FORM SURFACES INTO A VOLUMETRIC MODELLER
dr Tamas Varady
Studies 171/1985
A kiadásért felelős:
Dr Vámos Tibor
Főosztályvezető:
Dr Nemes László
ISBN 963 311 1927 ISSN 0324-2951
A lf a prin t
Acknowledgements
N o tatio n s
Chapter I - In tro d u c tio n
1 . Synthesis o f free-fo rm su rfa ce s and s o l i d m odelling... 11
2 . Free-form s u rfa c e s in engineering d e s ig n ... 15
3 . The BUILD g e o m e t r i c m odeller and i t s fre e -frc m f a c i l i t i e s ... 17
4 . Content of th e t h e s i s ... 27
Chapter I I - B asic eq u atio n s and sim ple g eo m etric p ro p e rtie s of double- -q u a d ra tic curve segments and s u rfa c e patches 1 . In tro d u c tio n ... 3i
2 . The equation of a d o u b le-q u ad ratic segm ent... 34
3 . The c h a r a c t e r i s t i c polygon of a d o u b le-q u a d ratic curve segm ent... 40
4. Seme p r o p e r tie s of th e planar d o u b le-q u a d ratic curve segm ent... 43
4 .1 . C urvature, i n f le c t i o n , lo o p s... 43
4 .2 . Line and c i r c l e approxim ation... 50
5 . The eq u atio n of a d o u b le-q u ad ratic p a tc h ... 54
6 . The c h a r a c t e r i s t i c polyhedron of a d o u b le-q u a d ratic p a tc h ... 56
7 . Minimum - maximum v a lu e s of d o u b le-q u a d ratic curves and s u r f a c e p a tc h e s ... 59
8 . Conclusion... 61
- 3 «•
la p te r I I I - Geom etric in te r r o g a tio n s fo r d o u b le-q u a d ratic c u rv es and d o u b le-q u a d ratic s u rfa c e s
1. In tro d u c tio n ... ... 65
2. Notes on v e c to r-s u rfa c e and c u rv e -su rfa c e in te r r o g a tio n s ... 68
3. Notes on s u rfa c e -s u rfa c e i n te r s e c t i o n s ... 72
4. IWo operand geom etric in te r r o g a tio n s ... 76
5. Simple geom etric elem ents... 78
6. D ouble-quadratic cu rv es... 81
7 . D ouble-quadratic s u rfa c e s ... 84
8. Global t e s t s ... 89
9. Vector - dq -cu rv e in te r r o g a tio n ... 93
10. Curve - dq-curve in te r r o g a tio n ... 94
11. Plane - d q-curve and q u a d ric - dq-curve in te r r o g a tio n s ... 96
12. Vector - d q -su rfa c e in te r r o g a tio n ... 96
13. Curve - d q -su rfa c e in te r r o g a tio n s ... 99
14. Surface - d q -su rfa c e in te r r o g a tio n s ... 104
15. Conclusion... 109
Chapter IV - A sim p le adaptive c u r v e - f it t i n g alg o rith m for g e n eratin g i n te r s e c tio n curves in volum etric m odellers 1. In tro d u c tio n ... 113
2. The dq-curve f i t t i n g a lg o rith m ... 116
3. C o n c lu sio n ... 119
- 4 -
5. Appendix - 2 , The n e a re s t p o in t on a d o u b le-q u a d ratic segment... 124
6. Appendix - 3 , Numerical e v alu atio n of B spline and dq-curve f i t t i n g w ith d i f f e r e n t f it- p a r a m e te r s ... 127
7 . Appendix - 4, D ouble-quadratic in te r s e c tio n cu rv es... 128
C h ap ter V - Analogy b etw een g e n e r a tin g p la n a r in te r s e c tio n curves and s ilh o u e tte curves of (d o u b le-)q u ad ra tic su rfa c e s 1. In tro d u c tio n ... 133
2 . I n te r s e c tio n of a p lan e and a b iq u a d ra tic p atch ... ... 136
3. S ilh o u e tte curve g e n e ra tio n to a b iq u a d ra tic p a tc h ... 139
4. Further problems in connection w ith s ilh o u e tte curve g e n e r a t i o n .... 143
Chapter VI - Conclusions 1. Free-form BUILD o b je c ts - sane en g in eerin g examples... 151
2 . Suggestion fo r fu r th e r re s e a rc h ... 160
3 . Summary... 162
R eferen ces... 164
L is t of F ig u re s... 174
- 5 -
I am in d e b te d t o th e M ech an ical E n g in e e rin g A u to m atio n D iv is io n of th e Computer and Automation I n s t i t u t e , e s p e c ia lly to Joe Hatvány, László Nemes and J u liu s Hermann fo r th e ir sup p o rt and encouragement to conduct t h i s geom etric m odelling re se a rc h . The c re a tiv e atm osphere of th e FFS s u rfa c e m odelling group a t CAI helped me very much in th e c l a r i f i c a t i o n of th e sy n th e s is problem. Many thanks to Malcolm Sabin and Mike P r a t t fo r d ir e c tin g me to th e BUILD G eom etric M o d e llin g G r o u p , C a m b rid g e U n i v e r s i t y E n g in e e r in g D ep artm en t. I am p a r tic u la r ly g r a te f u l to a l l members of the BUILD Group fo r t h e ir h o s p i t a l i ty and c o l l a b o r a t i o n , w hich made i t p o s s ib l e t o become f a m i l i a r w ith th e fu n d a m e n ta ls o f BUILD and t o overcom e many p ro b le m s. I am p a r t i c u l a r l y indebted to th e head of th e group, Graham Ja red , who in v ite d me to Cambridge, played an im p o rtan t r o le in th e U.K.-Hungarian re s e a rc h c o lla b o ra tio n and made s ig n i f ic a n t c o n trib u tio n s to th e re s e a rc h d escrib ed in t h i s t h e s is , in clu d in g th e c o rre c tio n o f my H ungarian-English.
7
NOTATION
L = (x ,y ,z ) v ecto r q u a n titie s w i l l be denoted by u n d erlin in g than
r-] L2 or
^ • X-2
^ X l2
s c a la r product of n-j and r.2
v ecto r product o f r-j and jz2
th e ab so lu te value of £
^0 index 0 always means u n itv e c to r
a11 a12 a13 a14 a21 a22 a23 a24.
a31
a32a33 ^34) a41 a42 a43 a44[
sign dependent m atrix - means depending on th e sign o f a c e r ta in param eter value (u) the t h ir d or th e fo u rth row o f th e m atrix w ill be taken
£ w ill be used fo r non equal
n ( t) v ecto r - s c a la r fu n ctio n
i t s d e riv a tiv e by param eter t
8
INTRODUCTION
1 .S y n th esis of fre e -fo rm s u rfa c e s and s o lid m odelling
Today's computer aid ed design system s employ a range of d i f f e r e n t methods fo r m o d e llin g com plex e n g in e e r in g o b j e c ts . The d a t a - s t r u c t u r e c r e a t e d by th e m o d e llin g s y s te m s makes i t p o s s ib l e to v i s u a l i z e th e o b j e c t s , draw t h e i r o r th o g o n a l and p e r s p e c t i v e v ie w s , g e n e r a te t o o l - p a t h s f o r NC m a c h in in g , analyze th e ir m echanical and thermodynamical c h a r a c t e r i s t i c s , and c a l c u l a t e t h e i r g e o m e tric and p h y s i c a l p r o p e r tie s . Two-dimensional draughting system s have obvious l im i ta t io n s fo r th e d e s c rip tio n of 3D shapes. While 3D w irefram e m o d ellers o ffe r a g re a te r p o te n tia l in t h i s re s p e c t, th e most advanced te c h n iq u es, which a re l ik e l y to be b a sic in fu tu r e CAD/CAM system s, a re th o se of su rfa c e m odelling and v o lu m e tric m odelling.
The two l a t t e r d i s c i p l i n e s have u n t i l r e c e n t l y been e v o lv in g s e p a r a t e l y . S c u lp tu r e d s u r f a c e m o d e llin g o r i g i n a t e d i n th e e a r l y s i x t i e s , when th e t h e o r e tic a l b a s is of piecew ise p aram etric su rfa c e s was developed by s e v e ra l w o rk e rs in c lu d in g Coons [23] , F erguson [33] , and B e z ie r [4] . V o lu m e tr ic m odelling s ta r te d in th e l a t e s i x t i e s by th e works of B raid [9] , V oelcker [79] , Okino [51] and o th e rs . I n i t i a l l y , th e only mode of c o n stru c tio n was th e use o f Boolean s e t o p e ra to rs on sim ple s o lid p r im itiv e s . The defin ed o b j e c ts w e re u s u a lly bounded by s im p le a n a l y t i c a l s u r f a c e s (p la n e s ,a n d q u a d r ic s ) d escrib e d by i m p l i c i t eq u atio n s.
Because of th e d iffe re n c e i n m athem atical su rfa c e fo rm u la tio n , th e two ty p e s o f sy ste m d e v e lo p e d l a r g e l y in d e p e n d e n tly . W hile p a r a m e t r ic e q u a tio n s a r e g e n e ra lly used to d e fin e bounded curve segments and su rfa c e reg io n s, i m p l i c i t
- 11
INTRODUCTION
e q u a tio n s s u g g e s t t h e use of i n f i n i t e h a l f - s p a c e s . D i f f e r e n t m a th e m a tic a l, a lg o rith m ic and com putational methods were ap p lied ; d i f f e r e n t design methods and user in te r f a c e s were created .
By th e l a t e s e v e n tie s , both d i s c ip l i n e s had s i g n if ic a n tly advanced and many co m m ercial s y s te m s w ere r e l e a s e d . At th e same tim e i t was r e c o g n is e d t h a t th e re a re many d e fic ie n c e s in bo th a re a s and t h a t many a p p lic a tio n s re q u ire th e sim ultaneous use of both tech n iq u es. Sculptured su rfa c e design system s had d i f f i c u l t i e s i n h a n d l i n g t o p o l o g y , i n d e f i n i n g c o m p o s ite s u r f a c e s , in c o r p o r a tin g i m p l i c i t s u r f a c e ty p e s and i n c r e a t i n g c lo s e d o b j e c t s . S o lid m odelling system s w ere not able t o d e sc rib e free-fo rm shapes, except by means of c o a r s e a p p ro x im a tio n s . They a l s o fa c e d th e pro b lem of a c c u r a t e l y re p re se n tin g i n te r s e c tio n curves, and blending s u rfa c e s , e tc ., which cannot be defined by sim ple a n a ly tic eq u atio n s.
From th e e a rly e ig h t i e s , in te n siv e re se a rc h work has been d ire c te d towards th e i n t e g r a t i o n o f f r e e - f o r m and s o l i d g eo m etry . T here a r e many g e o m e tric m odelling p r o je c ts , which a tta c k th e problem. J u s t a s h o rt l i s t of them, known t o th e a u th o r , and r e f e r e n c e s a r e g iv e n h e re : ALPHA-1 [21], [22]; BUILD [15],
[1] ; CATIA [3] ;COMPAC [66] , EUCLID [67]; EUKLID [31]; GBOMOD [44];GMSOLID [8] , MODIF/GBOMAP [41] ,[2 0 ], [45]; MEDUSA [37];ROMULUS [6] , [58]; REMUS [77] ; SYNTRAVISION [38]; TIPS [52]; IROREN [27]; UNIBLOCK [50]. D e ta ils can be found in th e a r t i c l e of P r a t t and Varady [55].
Some s i g n i f i c a n t r e s u l t s have b e e n p u b lis h e d . N e v e r th e le s s many q u e s tio n s s t i l l re m a in . In m o st c a s e s to a v o id p ro b lem s a c e r t a i n com prom ise m ust be made, which r e s u l t s i n t i g h t l i m i t a t i o n s on th e u se r of t h e s e advanced m o d ellers.
12
Some examples a re given as fo llo w s:
- New m ethods have been d ev elo p ed f o r c r e a t i n g f r e e - f o r m s o l i d s , b u t th ese cannot be combined using s e t o p e ra tio n s in a g en eral way.
- C ertain fre e -fo rm f a c i l i t i e s a re a v a ila b le in th e m o d eller, but th e s e a re i n s u f f ic ie n t to re p re se n t g e o m e tric a lly complex o b je c ts .
- The used s u rfa c e type i s a p p ro p ria te fo r d e scrib in g complex geometry (high d e g re e p o ly n o m ia ls ,a n d r a t i o n a l f u n c t i o n s ) , b u t t h e r e a r e r e s t r i c ti o n s fo r combining them, for example, free-fo rm s u rfa c e -s u rfa c e in te r s e c tio n i s not p e rm itte d , or th e com putation tim e i s unacceptable.
- The s u r f a c e s a r e r e p r e s e n te d o n ly a p p ro x im a te ly in f a c e t e d fo rm , c o n s e q u e n tly th e d i f f i c u l t i n t e r s e c t i o n p ro b lem i s a v o id e d , b u t t h e d a ta s tru c tu re may become in a c c u ra te , som etim es in c o n s is te n t.
- The su rfa c e s a re a c c u ra te ly re p re se n te d , b u t th e model, in clu d in g th e e d g e - c u r v e s a r e i m p l i c i t l y d e f i n e d , t h u s a t e a c h e v a l u a t i o n , com putationally expensive, m ostly num erical procedures must be ap p lied . The above l i s t e d geom etric m odelling system s, according to th e l a t e s t in f o r m ation known to th e a u th o r, s u ffe r from one or more of th ese "diseases". The BUILD p r o j e c t (Cam bridge U n iv e r s ity E n g in e e rin g D epartm ent) a d o p te d a compromise on th e s e le c tio n of the su rfa ce ty p e, b u t ra is e d high req u irem en ts on th e g e n e ra lity of th e so lu tio n .
A new f r e e - f o r m c u rv e and s u r f a c e r e p r e s e n t a t i o n c a lle d d o u b le-q u a d ratic s (h e re a fte r ab b rev iated to dq-s) was chosen. The d q -s not only have m athem atical and com putational b e n e f its , but a ls o s u f f i c i e n t freedom in making th e f r e e form co n tra s o lid s y n th e s is f le x ib le .
INTRODUCTION
The b a s i c id e a o f d o u b le - q u a d r a tic s i s t h a t i n s t e a d o f a c u b ic b le n d in g f u n c t i o n , two j o i n i n g p a r a m e tr ic q u a d r a t i c s a r e u se d . In t h i s way, a s u f f i c i e n t degree of freedom fo r designing a wide range of en g in eerin g o b je c ts i s p re s e r v e d , and s i g n i f i c a n t c o m p u ta tio n a l e f f i c i e n c y i s g a in e d , w hich c o m p en sates f o r t h e l o s s o f i n t e r n a l c u r v a t u r e c o n t i n u i t y . The g e o m e tric in te rro g a tio n s of dq-curves and s u rfa c e s can be solved m ostly by a n a ly tic and sim ple numerical methods. Comparing t h i s to o ther su rfa ce ty p es, t h i s lead s to ro b u st and e f f i c i e n t procedures, a p p r o p r i a te f o r b u i ld in g s o l i d s bounded by free -fo rm elem ents a s w ell.
BUILD uses a f u l ly evaluated boundary re p re s e n ta tio n . The edge curves, which l i e on th e s u rfa c e -s u rfa c e in te r s e c tio n curves a re a ls o e x p l i c i t l y sto re d . If th ese cannot be d e sc rib e d by sim p le a n a ly tic eq u atio n s, a very a cc u ra te f r e e form a p p ro x im a tin g c u rv e , i . e . a d q -c u rv e i s g e n e ra te d . I t i s f i t t e d u s in g a s p e c ia l technique, and i t s accuracy can be c o n tro lle d by th e to le ra n c e of the model.
The g r e a t e s t power o f th e BUILD d q -im p le m e n ta tio n i s t h a t th e f r e e - f o r m g eo m etry i s h a n d le d e x a c tly i n th e same way a s th e c o n v e n tio n a l one.
T h erefore, once fre e -fo rm s u rfa c e s have been in co rp o rated in to s o lid models, no d i s t i n c t i o n i s made a f t e r w a r d s , f o r ex am p le, a r b i t r a r y two s o l i d s w ith f r e e - f o r m fa c e s c a n be added t o g e t h e r . A ll BUILD o p e r a t io n s a r e e x te n d ed to s o l i d s bounded by d o u b le - q u a d r a tic e le m e n ts . T h is t h e s i s d i s c u s s e s th e com putational geometry side of th e s y n th e s is , what problem s need to be solved fo r ensuring the u n ifo rm ity of free-fo rm and conventional elem en ts, and how th e d o u b le-q u ad ratic curves and su rfa c e s were in co rp o rated in to BUILD.
- 14
2. Free-form s u rfa c e s in en gineering design
The use of f r e e - f o r m s u r f a c e s in p r a c t i c a l e n g in e e r in g d e s ig n c a n be c a te g o rise d in to four types from the u se r's p o in t of view , a s was suggested by M.J. P r a t t and th e author in [55]. These a re , in order of in c re a sin g d egree of geom etric c o n s tr a in ts on th e su rfa ce being designed:
(i) A e sth e tic su rfa ce s
( i i ) G en eralised duct su rfa c e s ( i i i ) Blends and f i l l e t s
(iv) F unctional or f i t t e d su rfa ce s
The d is tin c tio n s a re by no means c le a r - c u t, and in many case s some o v e rla p may o ccu r.
In th e c a se of a e s t h e t i c s u r f a c e s , a p p e a re n c e i s th e m ain c r i t e r i o n f o r a c c e p t a b i l i t y . O fte n th e r e a r e few p r e c i s e g e o m e tric c o n s t r a i n t s fro m th e p o i n t of view of f u n c t i o n a l i t y of w hat i s b e in g d e s ig n e d . D uring th e d e s ig n p r o c e s s , m o d if i c a t io n s a r e made u n t i l th e a p p e a re n c e i s a c c e p ta b le t o th e d esig n er. Examples in clu d e many p l a s ti c mouldings such as casin g s of household e l e c t r i c a l a p p lia n c e s .
G en eralised duct su rfa c e s a re su rfa c e s, which a re s u b je c t to more g eo m etric c o n s tr a in ts , u su a lly a t th e ir boundaries. O ften the p re c is e s p e c if ic a tio n of th e su rfa ce i s of no g re a t im portance, provided th a t i t g iv e s a smooth blen d between th e s p e c if ie d boundary co n d itio n s, and th a t i t s g ro ss c h a r a c t e r i s t i c s a re under th e d e s ig n e r's c o n tro l. Examples in clu d e many autom otive components such a s suspension arms, exhaust m anifolds and other ty p es of ducting.
INTRODUCTION
B le n d s and f i l l e t s a r e r e q u i r e d t o p ro v id e sm ooth t r a n s i t i o n s b etw een n e ig h b o u rin g p r e v i o u s ly d e fin e d o b j e c t f a c e s . I n t h i s c a s e , th e g e o m e tric c o n s t r a i n t s a re c l e a r l y g r e a t e r . The d e s ig n e r may w ish to have c o n tr o l over th e e x p l i c i t r e p re s e n ta tio n of th e f i l l e t s u rfa c e , in which case he w ill have to p rovide some sm a ll amount of in fo rm a tio n to supplement th e requirem ents fo r tangency w ith th e fa c e s being blended. A lte rn a tiv e ly , he may w ish to model th e f i l l e t e x p lic itly , b u t w ill sim ply la b e l an o b je c t edge as being blended. Many g e n e ra l engineering o b je c ts e x h ib it blends and f i l l e t s of th e kind d escrib ed , and th e y a re p a r t i c u l a r l y u s e f u l i n th e d e s ig n o f m o u ld in g s, c a s t i n g s and fo rg in g s .
The fo u rth c la s s o f su rfa c e s i s t h a t of fu n c tio n a l or f i t t e d su rfa c e s. Here a h ig h d e g re e of g e o m e tr ic c o n s t r a i n t i s a p p lie d t o th e s u r f a c e a s a w h o le, which i s usually f i t t e d to a la r g e number of measured or precomputed p o in ts . Examples include tu r b in e blades and th e aerodynamic su rfa ce s of a i r c r a f t s ; in both c a se s, the s u rfa c e s are o r i g in a ll y defined by refe ren c e to p h y sical law s, and m ust s a tis f y c e r t a i n o p tim a lity c r i t e r i a . D ev iatio n s from th e c o n s tr a in ts im p o sed w i l l le a d t o l o s s o f p e rfo rm a n c e . F i t t e d s u r f a c e s a r e a ls o w id e ly used in th e autom otive in d u stry f o r sp ecify in g car body shapes. These might be th o u g h t to be o f 'a e s t h e t i c ' v a r i e t y , b u t i n m o st com panies t h e a e s t h e t i c c r i t e r i a a re im posed d u rin g t h e c r e a t i o n o f a c la y m o d el, from w hich subsequently d i g it i s e d p o in ts a re used in th e g e n e ra tio n of a 'f i t t e d ' su rfa c e .
- 16 -
3 . The BUILD., geom etric m odeller and i t s f r e e - to r n f a c i l i t i e s
To be a b le t o f u l l y u n d e rs ta n d th e s i g n i f i c a n c e o f th e fo llo w in g c h a p t e r s , f i r s t th e s o lid m odelling background and th e design techniques fo r c re a tin g fre e -fo rm s o lid s must be p resen ted .
The BUILD g e o m e tr ic m o d e lle r (Cambridge U n iv e rs ity Engineering Department) r e p r e s e n t s one of th e b a s i c a p p ro a c h e s i n s o l i d m o d e llin g [1] , [15]. A ll to p o lo g ic a l and g eo m etrical in fo rm atio n concerning th e boundary of th e o b je c t i s s t o r e d i n th e s o - c a l l e d boundary r e p r e s e n t a t i o n . The l i n k s b e tw e e n th e v e r t i c e s , edges and f a c e s a r e s to r e d , to g e th e r w ith th e e q u a tio n s o f c u rv e s and s u r f a c e s on w hich th e ed g es and f a c e s l i e . I n t h i s c ase , th e " h i s t o r y " of th e o b j e c t c a n n o t be deduced from th e d a t a - s t r u c t u r e , b u t a l l th e n e c e s s a r y boundary d ata i s a t hand fo r subsequent a p p lic a tio n s .
I t m u s t be n o te d t h a t t h e o t h e r a p p r o a c h , t h e s o - c a l l e d CSG (C onstructive S olid Geometry) fac es problem s in in co rp o ra tin g fre e -fo rm geometry, which co n v en tio n ally re q u ire s th e use of bounded s u rfa c e s . CSG m o d ellers re p re s e n t th e o b je c ts in nonevaluated form by a t r e e - s t r u c t u r e , whose l e a v e s a r e v o lu m e tr ic p r i m i t i v e s , o f t e n e x p re s s e d i n t e r m s o f i n f i n i t e h a lf-s p a c e s and whose nodes a re th e Boolean o p e ra tio n s perform ed on them . Thus e i t h e r th e b a s ic CSG h a l f - s p a c e c o n c e p t or th e c o n c e p t of th e bounded p a ra m etric su rfa c e s must be extended.
17 -
INTRODUCTION
The o b je c ts in BUILD-4 can be bounded by s t r a ig h t l i n e s , conic segments, dq- c u rv e s , p la n e s , g e n e r a l q u a d r i c s and d q - s u r f a c e s . S t a r t i n g from p r i m i t i v e s o lid s such as b lo ck s, c y lin d e rs , cones, and sp h eres, e tc ., th e o b je c ts can be m o d ifie d by t r a n s l a t i o n , r o t a t i o n and s c a l i n g , and a f t e r w a r d s com bined by s e t - o p e r a t i o n s - "o r" (add), " a n d " ," d i f f e r ence" ( s u b t r a c t ) , and "n e g a te ".
BUILD-4 h as q u i t e a w ide ra n g e o f l o c a l o p e r a t io n s [42], w hich p ro v id e a means of making d ir e c te d changes to o b je c ts. These p reserv e to p o lo g ic al and geom etric c o n sisten c y , moreover avoid the expense of the g lo b al access to the e n tir e p a rt of th e model th a t i s necessary in Boolean s e t o p e ra tio n s. Examples of such lo c a l o p e ra tio n s are th e blending or cham fering of edges, the glueing to g eth er of two juxtaposed fa c e s , and th e s e ttin g of a "draught angle" on th e v e r t i c a l faces of an o b je c t, which i s to be m anufactured by a c a s tin g process, e tc .
The BUILD group h av e made many s i g n i f i c a n t c o n t r i b u t i o n s n o t o n ly to th e p r in c ip le s and b a s ic theory of g eo m etric m odelling [ 9 ] , [11], [12], but a ls o t o th e p r a c t i c a l a p p l i c a t i o n s i d e o f t h i s te c h n iq u e in th e a r e a of f i n i t e - - e le m e n t mesh g e n e r a tio n [8 0 ], a u to m a tic NC t o o l - p a t h g e n e r a tio n [53] , dim ensioning and to le ra n c in g [13], and fe a tu re -re c o g n itio n [46], e tc .
There i s a su b s y ste m in BUILD-4 c a l l e d " d esig n dq", f o r d e f i n i n g f r e e - f o r m e le m e n ts . F re e -fo rm s u r f a c e s c an be c r e a te d by d q - i n t e r p o l a t i o n or by q u a d r a t i c B - s p lin e a p p ro x im a tio n [69] ,[7 5 ]. (In b o th c a s e s d q -p a tc h e s a r e d e fin e d i n t e r n a l l y . ) In many p r a c t i c a l a p p l i c a t i o n s , s u r f a c e s a r e d e sig n e d based on c u rv e s or c u rv e - n e tw o r k s , s im p lif y in g th e w hole d e s ig n p ro c e d u re . W e ll-k n o w n t e c h n i q u e s su c h a s "sw eeping" ( t r a n s l a t i o n ) or "sw inging"
(ro tatio n ) a fre e -fo rm p r o f ile or c re a tin g a su rfa ce blended through a s e t of
18
s e c t i o n c u rv e s a r e a l s o a v a i l a b l e in th e c o u rs e of a " d e s ig n dq" s e s s io n . F in a l lo c a l adjustm ent of th e patches can be made by m odifying th e p o s itio n and th e ta n g e n t v e c t o r s o f th e s u r f a c e g r i d . The r e s u l t of th e " d e s ig n dq"
se ssio n i s an open or clo sed (at most one boundary) free -fo rm s u rfa c e , ready fo r fu rth e r use, th a t i s to be in co rp o rated in to a s o lid model.
A s e t of recommended o p e ra tio n s for s y n th e tiz in g free-fo rm s u rfa c e s and s o lid geometry are d escrib ed in th e a r t i c l e of P r a t t and Varady [55], Here only the m ost im p o r ta n t c a t e g o r i e s w i l l be o u t l i n e d . These o p e r a t io n s a r e under d ev elo p m en t i n BUILD. The f i r s t two g ro u p s a r e c o m p le te , th e " i n s e r t a new fa c e " and th e "ru b b er o b j e c t" o p e r a tio n s t o g e th e r w ith a l i m i t e d s u b s e t of autom atic blending a re planned to be com pleted in th e near fu tu re .
1. Surface - s o l i d o p e ra tio n s
Two o p eran d s - a f r e e - f o r m s u r f a c e and a p r e v io u s ly d e s ig n e d s o l i d - a re given. The r e s u l t i s a new s o lid w ith one or more faces ly in g on th e su rfa ce . Examples for th ese o p e ra tio n s a re shown in Fig.3.1. "SECTIONING" (b) c u ts o ff a c e r ta in p a r t of the s o lid , "SETSURF" (c) re p la c e s the geometry of a s e le c te d f a c e by th e f r e e - f o r m s u r f a c e , and "ADDSURF" (d) do es th e sam e, b u t only
"above" the s e le c te d fa c e . 2. Free-form p rim itiv e s
An open or c lo s e d f r e e - f o r m s u r f a c e i s g iv e n . Adding s t r a i g h t f o r w a r d g eo m etrical and to p o lo g ic a l e n t i t i e s according to d i f f e r e n t r u le s , p rim itiv e s o lid s can be c re ate d . T ypical examples a re th e follow ing as shown in Fig.3.2.
A DQPRISM (a) i s c r e a t e d by p r o j e c t i n g th e f r e e - f o r m s u r f a c e o n to a n o th e r s u r f a c e , and a DQCYLINDER (b) by a d d in g e n d - f a c e s t o a c lo s e d f r e e - f o r m su rfa ce . A DQOFFSET (d) s o lid i s made by th ick en in g th e free -fo rm s u rfa c e .
- 19
Figure 3.1
INTRODUCTION
3 . " I n s e r t a new face" o p e ra tio n
A s o l i d i s g iv e n . S p e c if y in g c o n s t r a i n t s f o r th e c o rn e r p o i n t s and th e boundaries of a s u rfa c e , a new - m o stly four sid ed - face can be added. E ither p o s i t i o n a l or t a n g e n t i a l c o n t i n u i t y can be s p e c i f i e d a c r o s s th e s u r f a c e boundaries in re s p e c t to the e x is tin g fa c e s. The in te r io r of th e su rfa c e can be a lte r e d as needed. The topology of th e s o lid i s lo c a lly changed depending on th e p o sitio n of th e boundaries and th e ir tangency. (See Fig. 3.3.)
4. "Rubber ob ject" o p e ra tio n s
C e r ta in p a r t s of t h e s o l i d - s p e c i f i e d by t o p o lo g i c a l e n t i t i e s , such as v e r tic e s , edges, ed g e-lo o p s, and fa c e s - can be converted to be e l a s t i c w ith or w ith o u t c o n s t r a i n t s c o n c e rn in g th e d e g re e s o f freedom f o r an e l a s t i c d e fo r m a tio n . As shown in F ig .3 .4 , th e e l a s t i c p ie c e s can be m o d ifie d or redesigned by using free -fo rm d esign tech n iq u es, w hile p reserv in g th e topology of th e o rig in a l s o lid .
5. Blending o p e ra tio n s
This o p eratio n i s of major im portance in en g in eerin g design. I t may be needed f o r a e s t h e t i c r e a s o n s , t o e n s u re m a c h i n a b i l i t y alo n g concave e d g es or to ensure d e sira b le m echanical p ro p e rtie s . Blending r e s u l ts in smooth tr a n s it i o n s u rfa c e s between f a c e s , rep la cin g sh arp co rn ers and edges of th e given so lid . I t can be " s u p e rfic ia l" named by B raid in [14], i.e . th e blends a re only glued t o th e body, or t o p o l o g i c a l , when th e b le n d s g e t e v a lu a te d and im p ly l o c a l changes in th e boundary d a ta s tr u c tu r e (see Fig. 3.5 and 3.6).
- 22
JÍ
I NJCO
I
c
b
F ig u r e 3 ,3
NOiio
c Figure 3.4 d
NOIJDDQOHLNI
F i g u r e 3 -
INTRODUCTION
T h ere i s a g e n e r a l g e o m e tr ic i n t e r f a c e i n BUILD f o r a l l p o s s i b l e g e o m e tr ic in te rro g a tio n s and in te r s e c tio n s of a l l curves and s u rfa c e s . A ll Boolean s e t o p e r a t io n s , l o c a l o p e r a t io n s and th e above s p e c i a l f r e e - f o r m v s. s o l i d o p e ra tio n s are implemented p u rely in term s of g e n e ra lise d p o in ts , curves and s u rfa c e s . This h o ld s fo r the g rap h ic subsystem , th e NC p ro c e ss o r, the f i n i t e — e le m e n t g e n e r a to r , e t c . , a s w e l l. A ll d e t a i l e d know ledge of th e a c t u a l r e p r e s e n t a t i o n s u sed and t h e i r p r o p e r t i e s i s c o n fin e d t o a c e n t r a l i s e d
"geom etric package". Thus, fo r example, where a p a ir of fa c e s a re in te r s e c te d d u r in g a s e t - o p e r a t i o n on tw o o b j e c t s , th e a lg o r ith m t o p r o c e s s th e r e s u l t d e a l s i n a g e n e r a l m anner w ith a s e t o f i n t e r s e c t i o n c u r v e s , r a t h e r th a n examining th e two su rfa c e s involved, d isc o v erin g t h a t maybe they a re p lan ar and using p ro p e rtie s s p e c if ic to s t r a ig h t l i n e in te r s e c tio n curves.
In t h i s way, new curve and su rfa c e types can be g rad u a lly introduced by adding th e n e c e s s a ry r o u t i n e s t o th e c e n t r a l i s e d g e o m e tric p a c k a g e , a v o id in g th e necessary comprehensive re w ritin g of th e e n t i r e programme a t every stag e. This a p p lie s in the case of th e d o u b le-q u ad ratic curves and su rfa c e s .
- 26
4. Content of th e th e s is
T h is t h e s i s i s a r e s u l t of th e r e s e a r c h work co n d u cted i n th e M ech an ical Engineering Automation D ivision of the Computer and Automation I n s t i t u t e of th e H u n g arian Academy of S c ie n c e s in th e p e r io d betw een 197 6 and 1984. The resea rch on th e fre e -fo rm vs. s o lid s y n th e s is , th e in te r r o g a tio n alg o rith m s and th e a c tu a l im plem entation of the d o u b le-q u ad ratic so ftw a re in BUILD were c a r r i e d o u t d u rin g th e a u t h o r 's v i s i t s t o th e BUILD G roup a t th e Cam bridge U n iv ersity Engineering Department in th e sp rin g of 1982 and in th e academic year of 1983/84.
T h is t h e s i s o b v io u s ly c an n o t co v er a l l t h e t h e o r e t i c a l and c o m p u ta tio n a l problem s, w h ic h h a d t o be s o l v e d to accom plish th e p r o je c t. Only a sm all p a r t was e la b o ra te d by th e au th o r, and only a p a r t of t h i s i s d iscu ssed here.
The d o u b le-q u ad ratic curve and su rfa ce d esig n methods, th e a lg o rith m s of th e f r e e - f o r m v s. s o l i d s y n t h e s i s and some o th e r t o p ic s m u st be n e g le c te d , in o rd e r t o fo c u s on th e m ain p o i n t s of t h i s t h e s i s , t h a t i s th e p ro b lem s and r e a l i z a t i o n o f th e g e o m e tric a lg o r ith m s f o r th e p r e v i o u s ly d e s c r ib e d c e n tra liz e d geom etric package in BUILD.
B a s ic a lly , t h i s t h e s is c o n s is ts of four independent essay s (Chapter I I , I I I , IV, V), each o f them can s ta n d by th e m s e lv e s and co v er one w e l l- d e f in e d p ro b lem . (T his l e d t o some o v e r la p s a t c e r t a i n p la c e s . The f i g u r e s and th e m athem atical form ulas a re a ls o numbered by chapters.) The common ro o t i s t h a t each o f them d i s c u s s e s c o m p u ta tio n a l g e o m e try p ro b lem s r e l a t e d t o d o u b le - - q u a d r a t i c s . A fte r th e i n tr o d u c to r y c h a p t e r , w hich d e f i n e s and d e s c r i b e s d o u b le-q u ad ratic curves and su rfa c e s , s o lid m odelling problem s a re p resen ted .
- 27
INTRODUCTION
Based on th e ir m ath em atical background, new a lg o rith m s a re d e scrib e d to g eth er w ith t h e i r a d v a n ta g e s and d is a d v a n ta g e s com pared to th e o th e r m ethods p u b lis h e d in l i t e r a t u r e . The c o m p u ta tio n a l a s p e c t s a r e a l s o fo c u s e d on throughout the t h e s i s .
In Chapter II th e b a s ic equations and th e most im p o rtan t geom etric p ro p e r tie s o f d o u b le - q u a d r a tic s a r e p r e s e n te d . The d o u b le - q u a d r a tic c u rv e and s u r f a c e c l a s s , as i t i s s t a t e d h e re i s my own " in v e n tio n " . The p r e s e n te d g e o m e tric in v e tig a tio n s can be s im ila r to th o se of other s o r t s of curves and su rfa c e s.
In C hapter I I I t h e g e o m e tric i n t e r r o g a t i o n s and i n t e r s e c t i o n s o f d o u b le - - q u a d ra tic s are d isc u sse d . Apart from th e s im p le s t g lo b al t e s t s and geom etric
in te rro g a tio n s th e s e a lg o rith m s a re th e r e s u l t of my own re s e a rc h work.
In C hapter IV a v o l u m e t r i c m o d e lle r o r i e n t e d c u r v e - f i t t i n g a lg o r ith m i s p r e s e n te d , which u s e s d q -c u rv e s . In C h ap ter V th e problem o f v i s u a l i z i n g fre e -fo rm so lid s i s tac k le d . An alg o rith m i s given fo r g e n eratin g s ilh o u e tte c u r v e s of d o u b le - q u a d r a tic s u r f a c e s . The c u r v e - f i t t i n g and t h e s i l h o u e t t e alg o rith m s are a l s o my own re se a rc h developments.
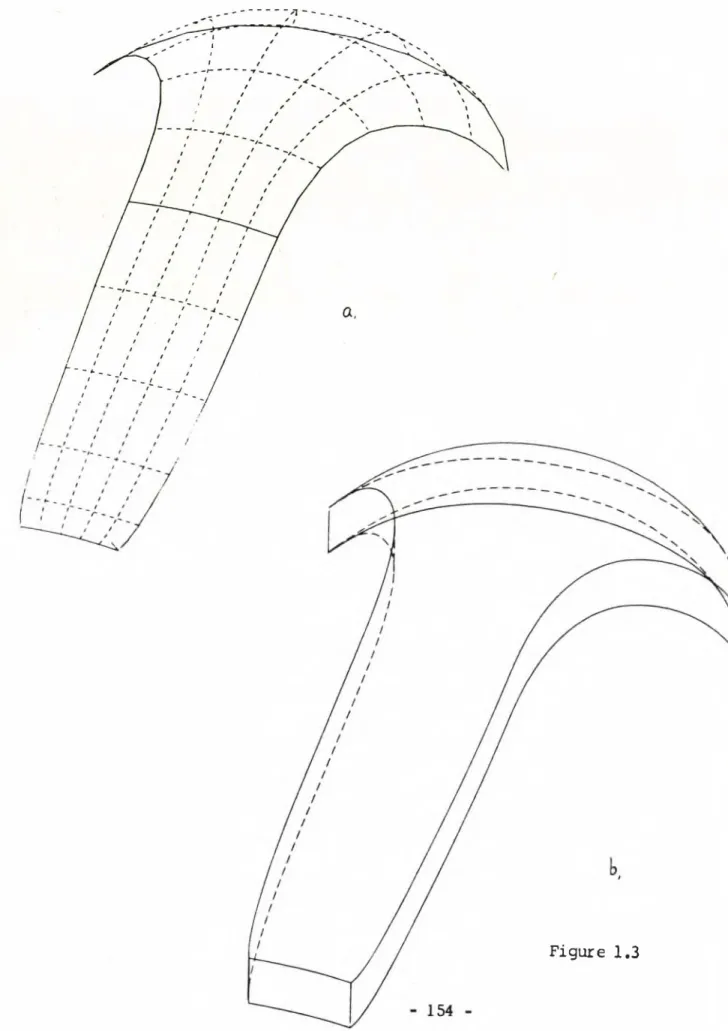
In C hapter VI a c o n c lu s io n i s draw n. A fte r su m m arizin g t h e r e s u l t s some p r a c t i c a l , m echanical engineering o b je c ts a re shown to i l l u s t r a t e th e design f a c i l i t i e s of th e BUILD free-fo rm m odelling. Suggestions fo r f u r th e r work a re a ls o giv en .
The l i s t of re fe re n c e s and f ig u r e s conclude th e th e s is .
The p i c t u r e s of t h e s o l i d o b j e c t s i n t h i s d i s s e r t a t i o n w ere a l l draw n w ith lo c a l hidden-line removal by the BUILD geom etric m odeller.
28
OF DOUBLE-QUADRATIC CURVE SEGMENTS AND SURFACE PATCHES
29
1. Introduction
The use of p iecew ise p aram etric eq u atio n s in computer a id ed geom etric d esig n was f i r s t in tro d u ced by Ferguson [33]. Since then th e m athem atical th eo ry of free-fo rm curve segments and su rfa c e p atch es was thoroughly e la b o rated in th e w orks of Coons [2 2 ], B e zier [4] , F o r r e s t [3 4 ], S ab in [5 9 ], [61] and o t h e r s . S e v e ra l d i f f e r e n t c o m p o site d e s ig n te c h n iq u e s w ere d e v e lo p e d , w e ll known examples a re th e s p lin e , B ezier, and B -sp lin e, e tc ., curves and su rfa ce s [24],
[49] , [5] , [39] ).
A la r g e p a r t o f th e e x i s t i n g co m m erc ial and r e s e a r c h s c u lp tu r e d s u r f a c e systems uses cubic equations. This i s m ainly due to th e fundam ental f e a tu r e of c u b ic s , t h a t th e y have s u f f i c i e n t freedom to d e s ig n com plex e n g in e e r in g sh a p e s. In th e e q u a tio n of a c u b ic c u rv e seg m en t, t h e r e a r e fo u r v e c to r c o e f f ic ie n ts . A convenient way to d e scrib e t h i s segment i s to supply th e two e n d p o in ts and th e two ta n g e n t v e c t o r s t h e r e , w hich u n iq e ly d e f in e a l l fo u r v e c to r c o e f f i c i e n t s . A nother c h a r a c t e r i s t i c f e a t u r e o f c u b ic s i s t h a t cu rv atu re c o n tin u ity i s ensured w ith in a segment.
C o n s id e rin g s u r f a c e d e f i n i t i o n s , t h e s e a r e m ost f r e q u e n t l y based on th e s im p lifie d v e rs io n of Coons's p atch es, th e b icu b ic te n so r product p a tc h es [32], sin c e th e corner p o in ts and th e tan g en t v e cto rs along th e boundaries can be blended in a convenient and s tra ig h tfo rw a rd way by cu b ic polynom ials. (Four t w i s t v e c t o r s m u st a l s o be added t o make th e g iv en 16 v e c to r c o e f f i c i e n t s f u lly c o n stra in e d .)
- 31
BASIC EQUATIONS
Many r e s e a r c h e r s a l s o i n v e s t i g a t e d th e p r o p e r tie s of p a ra m etric q u a d ra tic s , see fo r example th e q u a d ra tic B ezier and B ^spline curves. Due to th e lack of d esign freedom they were g e n e ra lly neglected in p r a c t ic a l design system s. Only a l im ite d a p p lic a tio n of them has been p u b lish ed , a s o u tlin e d h ere. In 1975, C h a ik in proposed a f a s t a lg o r ith m fo r h ig h -s p e e d c u rv e g e n e r a tio n in [18], L a te r i t was p ro v en ( [57], [3 5 ]), t h a t th e a lg o r ith m d e f in e s q u a d r a t i c B- s p l i n e s . That te c h n iq u e was g e n e r a l i s e d t o t h e r e c u r s i v e s u b d iv is io n a lg o rith m s for sm oothing down i r r e g u la r ly shaped polyhedrons as d iscu ssed in Sabin and Doo's p a p ers [29], [30], S ta rtin g from th e approxim ating polyhedron, t h i s method g en erated a s e t of q u a d ra tic B ^spline patches. Where no n -fo u r- s id e d re g io n s w e re fo rm ed , th e s u b d iv is io n m u st have been r e p e a te d , w hich e v e n tu a lly c o n v erg ed t o a sm o o th , Cl c o n tin u o u s s u r f a c e . (A new t h e o r e t i c a l r e s u l t by Sabin i s t h a t in ste a d o f perform ing su b d iv isio n s, th e 3 and 5 sid ed reg io n s can be re p la c e d e x p l i c i t l y by 3 and 5 sid e d patches, which smoothly j o in th e surrounding ones [63].) This su b d iv isio n concept was implemented in th e REMUS system [7 7 ],however, i t turned out t h a t th e o b jec t d e f in itio n based on t h i s approxim ating scheme i s q u ite d i f f i c u l t from an engineering p o in t of view [78].
R eturning to cu b ics - in s p ite of th e prev io u sly mentioned a t t r a c t i v e f e a tu r e s , many d i f f i c u l t i e s a r i s e when th e c o m p u ta tio n o f d i f f e r e n t g e o m e tr ic a l p r o p e r t i e s , i n t e r s e c t i o n s w ith o th e r g e o m e tric e le m e n ts , e tc ., a r e n eed ed , h o w e v er, in f a c t , th e s e a r e t h e m ost f r e q u e n t ta s k s in com puter a id e d g e o m e tr ic d e s ig n . G e n e r a lly , c o m p u ta tio n a lly e x p e n s iv e , n o t v e ry r o b u s t , i t e r a t i v e methods m ust be used. And here comes th e idea of d o u b le-q u a d ratic s.
Using two jo in in g p a ra m e tric q u a d ra tic eq u atio n s in s te a d of th e cubic one, th e com plexity, smoothness and the degrees of freedom of cubics can be re ta in e d .
- 32 -
M o reo v er, re d u c in g th e d e g re e o f th e used p o ly n o m ia ls , s i g n i f i c a n t com putational e ffic ie n c y can be gained to g eth er w ith o th er p r o p e r tie s , which emerged l a t e r when cubics and d o u b le-q u ad ratics were compared.
The " lo s s " i s c u r v a tu r e c o n t i n u i t y , w hich i s n o t n e c e s s a r i l y needed i n th e la rg e m a j o r it y of e n g in e e r in g a p p l i c a t i o n s . The s i m p l e s t exam ple i s an
"engineering" p iec e, where a plane and a c y lin d r ic a l s u rfa c e meet each o th e r, o b v io u s ly w ith c u r v a tu r e d i s c o n t i n u i t y . Another argument, however, i s t h a t cu b ics or th e higher order polynom ials ensure in te r n a l cu rv atu re c o n tin u ity , in most design system s, only ta n g e n tia l or normal c o n tin u ity a re s a t i s f i e d , when th e neighbouring patches a re a c tu a lly jo in e d to g e th e r.
T h e r e f o r e , i t was f e l t t h a t d o u b le - q u a d r a tic s re p re s e n t a good compromise between design freedom and com putational s i m p l i c i t y . F u r th e r i n v e s t i g a t i o n s w ere i n i t i a t e d in th e s e n s e t h a t n o t q u a d r a t i c s and c u b ic s , b u t d o u b le - -q u a d ra tic s and cubics were compared w ith each o th e r. This "double-thinking" , according to th e a u th o r's b e s t knowledge, has not been used in computer aided g e o m e tr ic d e s ig n . The o n ly s i m i l a r m ethod was th e u se o f b i a r c c u rv e s f o r c u r v e - f it t i n g [7 ]. Now, th e re i s a successor of th e d o u b le-q u ad ratic p atch es - th e s o - c a l l e d d o u b le - c y c l i d e s , d e s c r ib e d by d eP o n t i n h i s r e c e n t t h e s i s
[25] .
Double-quadratics (hereafter abbreviated to dq-s) were first tested in January 1981, as a part of the FFS (Free-Form Shapes) system [68], [36]. Since that time, a large project started in the BUILD geometric modelling Group, Cambridge University Engineering Department for integrating free-form surfaces into volumetric modelling. BUILD facilitates the design of complex
- 3 3 -
A S IC EQUATIONS
fre e -fo rm s o lid s bounded by d o u b le-q u a d ratic su rfa c e s b esid e th e conventional p lan ar and qu ad ric ones. D e ta ils can be found in [43],
In t h i s chapter, th e w e ll-k n o w n m eth o d s o f c r e a t i n g c o m p o s ite c u rv e s and s u r f a c e s a r e n o t d is c u s s e d . I t i s b e le iv e d t h a t t h e r e i s no s i n g l e b e s t technique fo r c re a tin g free-fo rm shapes, and d i f f e r e n t a p p lic a tio n s may need d i f f e r e n t methods, d i f f e r e n t in te r p o la tin g or approxim ating schemes. A wide v a r i e t y of them a r e d e s c r ib e d i n F a u x - P r a t t's book [32] . D esign w ith d q -s means th a t the b a sic c o n s titu tin g p ie c e s are dq-elem ents. In t h is in tro d u c to ry chapter we focus on th e b a s ic eq u atio n s of d o u b le-q u ad ratic curve segments and
su rfa c e patches to g e th e r w ith some sim ple p ro p e rtie s around them.
2 . The a5.uati.0iL .of a do u b le -q u a d ra tic curve segment
Given a curve segment, d efin ed by i t s endpoints xA, Xg and tangent v e c to rs x^, Xg, i t s p aram etric d e s c r ip tio n can be in te r p r e te d , t h a t th e curve re p re s e n ts th e p a th of a moving p o i n t , w hich ru n s from x_A to x.gr a s th e p a ra m e te r v a lu e r u n s a lo n g th e p a r a m e t r ic i n t e r v a l . The ta n g e n t v e c t o r s d e te r m in e th e d ir e c tio n and a ls o th e v e lo c ity of th e motion a t the endpoints.
Figure 2 .1 .
Since cubics and d o u b le-q u ad ratics a re very s im ila r to each o th e r, f i r s t l e t us s e e how a p a r a m e tr ic c u b ic e q u a tio n can s a t i s f y t h e above b o u n d a ry co n d itio n s. I t i s given in th e form of:
w here a q , i = 0 ,1 ,2 ,3 a r e th e v e c to r c o e f f i c i e n t s o f th e e q u a tio n , u i s th e p a ra m e te r. U s u a lly th e p a ra m e te r v a lu e s u=0 and u=l a r e a s s ig n e d t o th e e n d p o in ts , w ith 0 < u < 1 in betw een . The shape o f th e c u b ic se g m e n t i s uniquely defined by th e above four independent v ecto r q u a n ti t ie s , s in c e four degrees of freedom a re a v a ila b le .
S a tis fy in g th e end c o n d itio n s, th e fo llo w in g system of four equations can be o btained:
% + 2 ^ 2 + 3^3 = i ß
Solving t h i s fo r &q, aq, & 2' ^3 th0 fo llo w in g ex p ressio n s a re obtained:
* 0 =
(2.1)
(2.2)
^ 0 " ^A
+ a2 + ^3 = Lq
a- 1 =
(2.3)
* 1 = ^A
^ • 2 = 3 ^ ” -^-A )
a.3 = 2 ( Ia - I ß ) + Ía + Íb
- 3 5 -
BASIC EQUATIONS
For c o m p u ta tio n a l p u rp o s e s g e n e r a l l y th e w e ll-k n o w n b le n d in g f u n c tio n form alism i s used [32]. The b lending fu n c tio n s ensure th e appearence and the d is a p p e a re n c e of t h e g iv e n p o s i t i o n a l and t a n g e n t i a l c o n s t r a i n t s a s th e p a ra m etric v a ria b le ru n s along th e p a ra m e tric i n te r v a l. I f th e fg , f^ , g g , g^
blending fu n ctio n s s a t i s f y the fo llo w in g co n d itio n s
f 0(0) = 1, f 0 (l) = 0, f^O) = 0, ^ (1 ) = 1, (2.4) f0 '(0) = f0 *(l) = f i '( 0 ) = f i ( l ) = 0,
g0(°) = g0 d ) = 9i (0) = 9 i (l) =■ o,
g0 ' (0) = i f g0 ' (l) = 0 , g1 , (0) = u , ' (1 ) = l
then th e above s p e c if ie d curve-segm ent can be w r itte n in th e follow ing form:
(2.5) jl(u) = x& fo (u ) + Lq f x (u) + x& g(u) 0 + i ß 9 i(u ) • In th e cubic case, fo r example:
f0 (u) = 1 - 3u2 + 2u3 (2 .6 ) f i ( u ) = 3u2 - 2u3
gg(u) = u - 2u2 + u3 9 i(u ) = -u2 + u3
This lea d s us to th e commonly used m a trix -e q u atio n of cubic segments:
(2.7) X. = II £ S.
where
LL = [ 1 u u2 u3 ] ,
1 0 0 0
V
0 0 1 0 , S =
-3 3 -2 -1 Z-A
2 -2 1 1
zb
- 36
A param etric d o u b le-q u ad ratic curve segment i s defined in th e form of:
(2 .8 ) x = x(u) =
X (u) = ^ 2 “ + ^1 u + ^0 - 0 .5 <= u <= 0
X+ (u) = h.2 + kq u + &o 0 < u <= 0.5
where äq/kq; i = 0 ,1 , 2 are th e vector c o e f f ic ie n ts of th e eq u atio n , u i s th e param eter.
As th e eq u atio n shows, the segment i s composed of two q u a d ra tic s . P reserving th e u n i t p a r a m e t r ic le n g th , th e p a ra m e te r i s chosen t o ru n from -0 .5 t o 0.5 fo r symmetry reasons. We have gained four c o n s tra in ts a s p rev io u sly and six degrees of freedom , since th e re are six v ecto r c o e f f ic ie n ts to be determ ined in (2.8). The rem aining two a re fo r s a tis f y in g p o s itio n a l and f i r s t d e riv a tiv e c o n t i n u i t y a t u=0. A fte r s u b s t i t u t i o n th e f o llo w in g sy ste m of e q u a tio n s i s obtained:
0.25^2 “ 0 . 5 ^ + = x^q, (2.9) -& 2 + üq - Lfrr
0.25)22 + 0 .5 k q + ]2q = Xg, h 2 + ill = i ß
At th e m idpoint
(2.10) lim x (u) = lim x (u) ,
u —0 u-*0
lim x- (u) = lim x+ (u) ,
u - 0 u —0
th u s:
(2.11) = & 0 and aq = bq,
- 37
BA SIC EQUATIONS
N o te , t h a t äq, &q and a ^ , g iv e th e m id p o in t p o s i t i o n and ta n g e n t v e c t o r s r e s p e c t iv e ly . S o lv in g th e sy ste m of th e above s i x e q u a tio n s f o r a.^, we g ain th e so lu tio n below:
(2.1 2)
ao = bo = 0 .5 (1 * + Lq) + 0 .1 2 5 (£a - ig )
% = k l = " Z f ) - ° * 5 < 4 +
a2 = 2 (lß - jla ) - 0 .5 ( 3 ^ + iß ) = A l - i * t>2 = 2 ( i * - iß ) + 0 .5 ( i * + 3 iß ) = -J^! + i ß
The b le n d in g f u n c t i o n e q u a tio n h o ld s f o r d o u b le - q u a d r a tic s a s in c a s e o f c u b ic s, see (2.4). A ll d o u b le-q u ad ratic blending fu n c tio n s a re composed of two q u a d ra tic p ieces, a s follow s:
fg (u) = - 2 \ r - 2u + 0 .5 , (2.13) f f ( u ) = 2u2 + 2u + 0 .5 ,
f0+ (u) = 2u2 - 2u + 0 .5 , f^~*"(u) = —2u2 + 2u + 0 .5 , g0 (u) = - 1 .5 u2 - 0.5u + 0.125, gg+ (u) = 0.5u2 - 0.5u + 0.125, g1“ (u) = - 0 .5 u2 - 0.5u - 0.125, g-j + fu) = 1.5u2 - 0.5u - 0.125.
To be a b le to use t h e r e l a t i n g m a tr ix f o r m a lis m , we have t o in tr o d u c e th e n o ta tio n of sign-dependent c o e f f ic ie n ts . For example,
(2.14) xu =
5 8
m eans, t h a t d e p e n d in g on w h e th er a n o th e r v a r i a b l e , say u i s l e s s - e q u a l or g r e a t e r than z e r o , x u e q u a ls 5 o r 8 , r e s p e c t i v e l y . Going f u r t h e r , u s in g signdependent m a tr ic e s , the t h ir d or the fo u rth row must be tak en depending on th e sig n of another v a ria b le . In th e case of a d o u b le-q u ad ratic curve segment, th e equation can be given in th e form of :
- 38 -
(2.15) JL =
i
where
II = [ 1 u u2] ,
0.5 0.5 0.125 -0.125
2 - 0 .5 -0 .5
2 - 1 .5 -0 .5
- 2 0 .5 1.5
£ i s as in ( 2 .7 ) .
r
The s o -c a lle d f u lln e s s of d o u b le-q u ad ratic cur v e - segments can be a d ju ste d i n th e same way as in case of cu b ics. With fix ed e n d p o in ts, th e and ig ta n g e n t v e c to rs can be w r itte n in th e form below:
~ ^ ^AO'
(2.16) Lq = ß Lqq.
i.AQ and i_BQ d e f i n e s th e u n i t d i r e c t i o n v e c t o r s , «>< and ß d e f in e s t h e m agnitudes of the tan g en ts. Having fix e d the u n it v e c to rs , th e adjustm ent of c* and ß a l t e r s th e shape o f t h e segm ent, a s shown in F ig .2.2 and F ig .2 .3 .
- 3 9 -
BASIC EQUATIONS
This fe a tu re i s s ig n if ic a n t from th e design p o in t of view , t h a t i s when lo c a l shape m o d ifica tio n i s needed and a ls o for adequate curve f i t t i n g , where th e b e s t a lte r n a tiv e i s generated by t h i s s o rt of adjustm ent of f u lln e s s .
3. The c h a r a c t e r i s t i c polygon of a double-ciuadratic curve, segm ent
B e z ie r chose a s p e c i a l r e p r e s e n t a t i o n f o r d e f in in g c u r v e s [4] . From a m athem atical p o in t of view, th e cubic Bezier curve i s only a rearrangem ent of th e (2.5) e q u a tio n . In B e z ie r 's fo rm :
(3 . 1) jl(u) = (1- u ) 3 zq + 3u ( l - u ) 2l1 + 3u/ (] -u)i_2 + u3jl3 , where
*0 = lA'
(3.2) L-i = La + L f /3,
L-2 = Lq ~ Lq/ 3,
^3 = *B*
The s i g n i f i c a n c e o f t h i s f o r m u la ti o n i s t h a t by means o f th e above v e c t o r s , th e s o - c a l l e d c h a r a c t e r i s t i c p o ly g o n can be c o n s tr u c te d (F ig .3.1). In f a c t , t h e cu rv e i s c h a r a c t e r i z e d by t h i s p o ly g o n , s in c e i t p a s s e s th ro u g h th e e n d p o in ts and i t i s t a n g e n t i a l to th e (l.± - and ^ 3 " Lq) v e c t o r s , r e s p e c t i v e l y . The c h a r a c t e r i s t i c polygon i s n o t o n ly an a d e q u a te t o o l f o r a d ju s ti n g c u r v e s , b u t i t f a c i l i t a t e s th e u n d e rs ta n d in g o f many r e l a t i n g geom etric p r o p e r tie s [32]. These include th e convex h u ll p ro p erty and a ls o th e stra ig h tfo rw a rd geom etric i n te r p r e ta tio n of c u rv a tu re , p o in ts of in f le c tio n s , and lo o p s, e tc .
- 40
The c h a r a c t e r i s t i c polygon of d o u b le-q u ad ratics can be d eriv ed analogously (based on th e q u a d ra tic B ezier fo rm u la tio n ):
= L h '
(3 .3 ) = JLA + i . f / 4 , I_ 2 = l£. “
U nlike in equation (3.2) here we use o n e-fo u rth of the tan g en t v e c to rs. The p r o p e r t i e s o f th e c u b ic B e z ie r cu rv e can a l s o be g e n e r a liz e d fo r d o u b le q u a d ra tic s . Moreover, c a lc u la tin g th e jl(u) and i(u ) v ecto rs a t th e m idpoint we
o b ta in :
(3.4) JL(0) = 0.5 ( jla + Xß) + 0.125 ( i A - i ^ ) , i ( 0) = 2 ( Iq - - 0 .5 ( iß + iß )
T h is means t h a t th e m id p o in t o f a d o u b le - q u a d r a tic segm ent i s e q u al t o th e m idpoint of the c h a r a c te r is tic polygon, th a t i s to the a rith m e tic mean of and i_2- F u rth e rm o re , th e d i f f e r e n c e v e c to r o f jl2 and r.^ i s t a n g e n t i a l t o th e curve t h e r e .
(3.5) 1.(0) = 0.5(12 + jl2) f 1.(0) = 2 (i 2 - Iq) •
41
BASIC EQUATIONS
To sum i t up , t h e c h a r a c t e r i s t i c polygon o f d o u b l e - q u a d r a t ic s g iv e s a m ore c o n v e n ie n t t o o l f o r l o c a l a d ju s tm e n t th a n t h a t of c u b ic s . C o n s tr u c tin g th e c h a r a c te r is tic poly g o n , one can im m ediately see the behaviour of th e cu rv e, sin c e not only th e endpoints, b u t th e m idpoint and the corresponding ta n g e n t v ecto r become " v is ib le " in t h i s way.
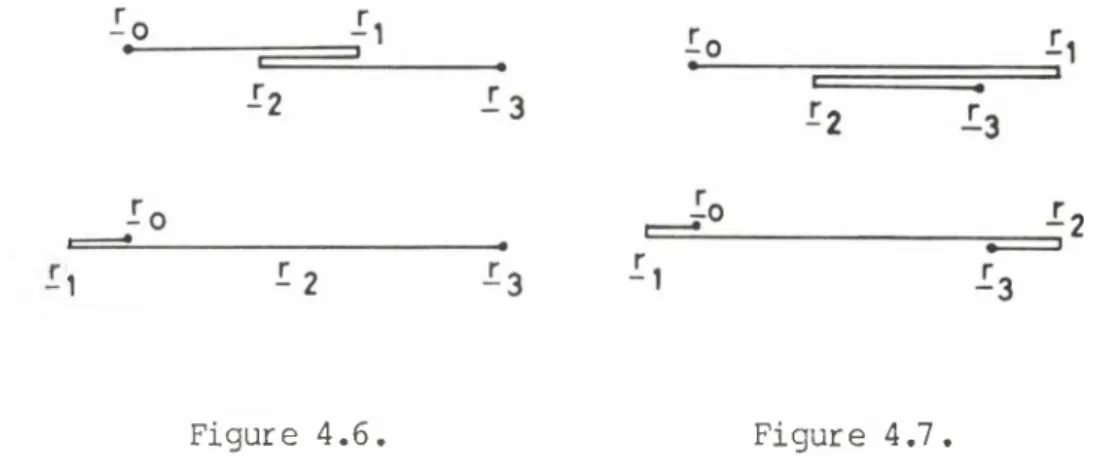
D o u b le -q u a d ra tic c u rv e -s e g m e n ts can r e p r e s e n t t w i s t e d 3D c u rv e s a s w e l l , in s p ite of t h a t they are made up of p la n a r p ie c e s , a s shown in F i g .3.2 b elo w . The t w i s t i s alw ay s a t t h e m id p o in t, u n lik e c u b ic s , w here i t c h an g e s continuously along the segment.
I b(u=0.5)
The midpoint of th e cubic segment can be expressed by s u b s titu tin g u=0.5 in to th e (2.5) eq u atio n .
(3.7) 1.(0.5) = 0.5Qla + Lq) + 0.125(£A - j^)
- 4 2 -
S u rp ris in g ly , t h i s i s th e same fo r the d o u b le-q u ad ratic segment w ith th e same e n d - c o n d itio n s . T h is i s one m ore argum ent f o r th e p r e v io u s ly m e n tio n e d s i m i l a r i t y (see F ig . 3 .3 ), i . e . th e two d i f f e r e n t ty p e s o f cu rv e se g m e n ts b e s id e b eh av in g s i m i l a r l y i n th e v i c i n i t y o f th e e n d p o in ts , go th ro u g h th e sam e m id p o in t a t th e p a r a m e tr ic h a l f . I t m ust a l s o be n o te d t h a t s i n c e th e c h a r a c t e r i s t i c polygon of dq-s i s th e 3 /4 -th of cu b ics, more e f f i c ie n t convex h u ll t e s t s can be perform ed on them.
4. Some p ro p e rtie s of th e planar d o u b le-c u ad ra tic curve segment
4.1. Cmvature> in flectio n , loops
Examining th e shape of a p a ra m etric curve segm ent, one may wonder whether i t has got a p o in t of in f le c tio n or i t i s looping. Having th e given p o s itio n and ta n g e n t v e c t o r s , th e s e q u e s t io n s can be e a s i l y an sw ered by means o f th e c h a r a c t e r i s t i c polygon or by a lg e b ra ic a n a ly s is of the c u rv a tu re. We fo llo w th e geom etric in te r p r e ta tio n .
The c u rv a tu re of a p a ra m etric curve i s c h a ra c te riz e d by th e vector K^u) B(u), w here kf (u) i s th e r e c i p r o c a l v a lu e of th e r a d i u s of th e o s c u l a t i n g c i r c l e , B.(u) denotes th e s o -c a lle d binormal u n it v e c to r.
D en o tin g th e ta n g e n t and n o rm al u n i t v e c t o r s of th e c u rv e by 2 and N, re s p e c tiv e ly , we can w rite :
Ijl(u) X £(u) I £(u) X £(u)
(4.1) IC(u) =
li.(u) X £(u)
(4.2) H = B X 2 .
- 43
BA SIC EQUATIONS
In th e case of p lan ar curves,B i s alw ays p erp en d icu lar to th e plane, where th e curve and the corresponding T, N v e c to rs l i e . N always p o in ts to the c e n tre of th e o s c u la tin g c i r c l e . The s ig n o f th e jl(u) X £(u) v e c to r p ro d u c t t e l l s us i n which side of th e curve th is c e n tre l i e s . Whenever the B u n it vector changes i t s s ig n , a p o i n t o f i n f l e c t i o n o c c u rs , su p p o sin g £(u) / 0 . T h is l a s t c o n d itio n holds in th e p r a c tic a l c a se s, o th erw ise we g et cusps as in F ig .4.1.
Expressing the c u rv a tu re by the s c a la r c o e f f ic ie n ts of a dq curve-segm ent, we o b ta in :
- 2
Figure 4.1 Figure 4.2
a2yalx " a2xaly I
I 13 - 0 .5 <= u <= 0
(4.3) K*(u)
^2y^lx ^2x*3ly
0 < u <= 0.5
44
t h a t i s th e sig n of th e c u rv a tu re i s co n stan t w ith in one q u a d ra tic p ie c e , and can change only a t th e m idpoint. This means t h a t a d o u b le-q u ad ratic segment h a s a p o i n t o f i n f l e c t i o n i f and o n ly i f th e s ig n of th e above e x p r e s s io n s d i f f e r . I t can be se en t h a t th e two p i e c e s e i t h e r j o i n each o th e r w ith c u rv a tu re c o n tin u ity , i f th e two num erators a re equal, or th e re i s a jump in K"(u), i f n o t.
One s tra ig h tfo rw a rd way of d e sc rib in g c u rv a tu re s i s using th e v e cto rs of the B e z i e r - l i k e c h a r a c t e r i s t i c p o ly g o n .U sin g th e e q u a tio n s (2.8) and (3.3) we o b ta in :
£ ( - 0 . 5 ) = 4(x.1 - Xq)
(4.4) £ ( - 0 . 5 ) = 8(1^ - x.-j_) + 4 (x_2 - JLX)
£ ( 0 .5) = 4 ( 1 3 - ^
£ ( 0 .5 ) = 8(jl2 - JL3 ) + 4(jl1 - jl2)
Consequently
(4.5) ( - 0 .5 ) = [ t q - xo) X (jl2 - j ^ ) ] / 4 1 ^ - j ^ l 3 K (0.5) = [ (n3 - jl2 ) X (£]_ - jl2 )] / 4 |jl3 - JL2 13
Since th e c u rv a tu re does not change i t s sign w ith in one q u a d ra tic p ie c e , th e c e n tre of th e o sc u la tin g c i r c l e in the f i r s t h a lf " d ire c ts " towards th e chord PqP2, in th e second tow ards P^P^. As was shown, the sig n s of the c u rv a tu re a t th e e n d p o in ts a r e d e fin e d by th e v e c t o r s of th e c h a r a c t e r i s t i c p o ly g o n , and th e s e determ ine th e cu rv atu re in th e whole segment. C onsidering th e s t r a i g h t l i n e , w hich g oes th ro u g h P^ and P2 , i f PQ and P3 l i e in t h e same s id e o f th e l i n e , then:
(4.6) £ (-0 .5 ) = £ ( 0 . 5 ) ,