AUTOMATIKA
AUTOMATIKA
Dr. Tóth János
TERC Kft. • Budapest, 2013
© Dr. Tóth János, 2013
Kézirat lezárva: 2012. november 9.
ISBN 978-963-9968-57-8
Kiadja a TERC Kereskedelmi és Szolgáltató Kft. Szakkönyvkiadó Üzletága, az 1795-ben alapított Magyar Könyvkiadók és Könyvterjesztők Egyesülésének a tagja
A kiadásért felel: a kft. igazgatója Felelős szerkesztő: Lévai-Kanyó Judit
Műszaki szerkesztő: TERC Kft.
Terjedelem:8,25 szerzői ív
TARTALOMJEGYZÉK
1. AZ AUTOMATIZÁLÁS JELENTŐSÉGE ... 13
2. IRÁNYÍTÁSTECHNIKAI ALAPFOGALMAK ... 15
2.1. A JELEK FELOSZTÁSA ... 17
2.2. AZ IRÁNYÍTÁSTECHNIKA FELOSZTÁSA ... 19
2.2.1. A vezérlés ... 19
2.2.2. A szabályozás ... 19
2.2.3. A vezérlés és a szabályozás összehasonlítása ... 20
2.3. A VEZÉRLÉS ÉS A SZABÁLYOZÁS CSOPORTOSÍTÁSA ... 22
2.4. IRÁNYÍTÁSI RENDSZER ÁBRÁZOLÁSA ... 23
2.5. A RENDSZERELEMEK KAPCSOLÁSI MÓDJAI ... 25
2.5.1. Soros kapcsolás ... 25
2.5.2. Párhuzamos kapcsolás ... 26
2.5.3. Visszacsatolás ... 27
2.6. HATÁSVÁZLATOK ÁTALAKÍTÁSA ... 27
3. VEZÉRLÉSTECHNIKAI FÜGGVÉNYEK ÉS ALKALMAZÁSUK ... 30
3.1. HALMAZELMÉLETI ALAPFOGALMAK ... 30
3.2. BOOLE‐LOGIKAI ALGEBRA ... 31
3.3. A LOGIKAI ALGEBRA SZABÁLYAI, AZONOSSÁGAI ... 33
3.4. EGY ÉS KÉTVÁLTOZÓS VÁLTOZÓS LOGIKAI FÜGGVÉNYEK ... 33
3.5. LOGIKAI FÜGGVÉNYEK REALIZÁLÁSA KAPUKKAL, KONTAKTUSOKKAL, IGAZSÁGTÁBLÁZATTAL ÉS KV TÁBLÁZATTAL ... 34
3.6. FUNKCIONÁLISAN TELJES RENDSZEREK ... 36
3.6.1. Kapcsolások megvalósítása NAND és NOR kapukkal ... 36
3.7. A DISZJUNKTÍV ÉS A KONJUNKTÍV ALAK KAPCSOLATA ... 39
3.7.1. 2, 3 és 4 változós mintrem és maxterm KV táblák ... 40
3.8. GRAFIKUS MINIMALIZÁLÁS SORÁN ELVÉGZENDŐ FELADATOK ... 40
3.8.1. Primimplikánsok keresése ... 40
3.8.2. A szükséges primimplikánsok kiválasztásának lépései ... 41
3.9. LOGIKAI FÜGGVÉNYEK KÉTSZINTŰ REALIZÁLÁSA ... 43
3.10. KOMBINÁCIÓS HÁLÓZATOK TERVEZÉSÉNEK LÉPÉSEI ... 44
3.11. A PROGRAMOZHATÓ LOGIKAI VEZÉRLŐ (PLC) ... 49
3.11.1. A programozható vezérlők főbb jellemzői: ... 50
3.11.2. A szoftverjellemzők bemutatása példákon keresztül ... 50
4. SZABÁLYOZÁSTECHNIKAI ÁTVITELI TAGOK JELLEMZÉSE ... 55
4.1. MATEMATIKAI ALAPOK ... 57
4.1.1. Fourier transzformáció ... 58
4.1.2. Laplace transzformáció ... 59
4.1.3. Műveleti szabályok ... 60
4.2. AZ IDŐTARTOMÁNYBAN ... 63
4.2.1. Tipikus vizsgálójelek ... 63
4.3. AZ ÁTVITELI TAGOK CSOPORTOSÍTÁSA ÉS JELLEMZŐIK ... 64
4.3.1. Arányos, időkésés nélküli tag (P) ... 66
4.3.2. Egytárolós arányos tag (PT1) ... 68
4.3.3. Kéttárolós arányos tag (PT2) ... 71
4.3.4. Időkésés nélküli tag Integráló tag (I) ... 74
4.3.5. Integráló, elsőrendű időkésleltetett tag (IT1) ... 76
4.3.6. Integráló, másodrendű időkésleltetett tag (IT2) ... 78
4.3.7. Differenciáló, időkésés nélküli tag (D) ... 80
4.3.8. Differenciáló, elsőrendű időkésleltetéses (DT1) tag ... 82
4.3.9. Differenciáló, másodrendű időkésleltetéses (DT2) tag ... 84
4.3.10. Holtidős, H tag ... 86
4.3.11. Arányos, elsőrendű időkésleltetett holtidős (PT1H) tag ... 89
4.3.12. Integráló, holtidős (IH) tag ... 91
4.4. KÜLÖNBÖZŐ ÁTVITELI FÜGGVÉNYEK MEGVALÓSÍTÁSA MATLABBAL ... 93
4.5. ÁTVITELI TAGOK LEÍRÁSA ÁLLAPOTEGYENLETEKKEL ÉS ÁLLAPOTVÁLTOZÓKKAL ... 97
5. STABILITÁSVIZSGÁLAT ... 101
5.1. A ROUTH‐HURWITZ STABILITÁSI KRITÉRIUM ... 102
5.2. A NYQUIST STABILITÁSI KRITÉRIUM ... 104
5.3. STABILITÁSVIZSGÁLAT BODE‐DIAGRAMOKKAL ... 106
5.4. FELÉPÍTÉSBŐL ADÓDÓ, FELTÉTELES STABILITÁS ... 107
5.5. A SZABÁLYOZÁSI MINŐSÉG MEGÍTÉLÉSE ÉS A MINŐSÉG BIZTOSÍTÁSA ... 108
6. SZABÁLYOZÓK KOMPENZÁLÁSA, OPTIMÁLIS BEÁLLÍTÁSA ... 112
6.1. A P SZABÁLYOZÓ ... 113
6.2. A PI SZABÁLYOZÓ ... 114
6.3. A PD SZABÁLYOZÓ ... 115
6.4. A PID SZABÁLYOZÓ ... 116
6.5. AKTÍV LENGÉSCSILLAPÍTÁSI FELADAT MATLAB PROGRAMMAL ... 118
6.5.1. Megoldás P típusú szabályzóval ... 120
6.5.2. Megoldás PD típusú szabályzóval ... 121
6.5.3. Megoldás PI típusú szabályzóval ... 122
6.5.4. Megoldás PID típusú szabályzóval ... 123
6.5.5. Különböző típusú szabályozók kimenő jelre gyakorolt hatásai ... 124
6.6. ERŐSÍTÉS ÉS FÁZISELTOLÁS MEGHATÁROZÁSA MATLAB SEGÍTSÉGÉVEL ... 125
6.7. KOMPENZÁCIÓ BEÁLLÍTÁSA ZIEGLER‐NICHOLS SZERINT ... 126
6.7.1. Frekvencia válasz módszer ... 126
6.7.2. Átmeneti függvény módszer ... 127
6.8. A KOMPENZÁCIÓ KIVÁLASZTÁSA BODE‐DIAGRAMOK SEGÍTSÉGÉVEL ... 129
FELHASZNÁLT SZAKIRODALOM ... 133
ALKALMAZOTT JELÖLÉSEK JEGYZÉKE
1(t) egységugrásfüggvény
A átviteli tényező
A állapotmátrix
Ap arányos átviteli tényező
B kontrollmátrix
C konstans
C kimenőjel mátrix
Cn amplitúdó
CC1 felfelé számláló címzése PLC-nél
de nevező
D átviteli mátrix
DC1 lefelé számláló címzése PLC-nél
f súrlódási tényező
F Fourier-transzformáció
F-1 inverz Fourier-transzformáció
I1, I2, …, In PLC bemeneteinek fizikai címe
Iabsz abszolút integrál
Ilin lineáris integrálkritérium
Iidő idővel súlyozott integrálkritérium
Inégy négyzetes integrálkritérium
j frekvenciatartomány jele
k konstans
k1, k2, …, kn időállandók
K rugóállandó
Kd differenciáló erősítési tényező
Ki integráló erősítési tényező
Kkrit kritikus körerősítés
Kp arányos erősítési tényező
L Laplace-transzformáció
L-1 inverz Laplace-transzformáció
min minterm
Min maxterm
nu számláló
p1, p2, p3, …, pn gyökök
[Q1, [Q2, …, [Qn PLC kimeneteinek fizikai címe
s operátortartomány jele
s1, s2, …, sn gyökök
u beavatkozójel
u(t) bemenőjel
UCC,UT tápfeszültség
UIH bemeneti 1 szint
UIL bemeneti 0 szint
UOH kimeneti 1 szint
UOL kimeneti 0 szint
T1, T2, tárolós időállandó
Ta, Tb időállandók
TD differenciálási idő
Tf felfutási idő
Th, TH holtidő
TI integrálási idő
Tn időállandó
Ts periódusidő
[Q1, [Q2, ..., [Qn kimenetek fizikai címei
v(t) átmeneti függvény
vt(t) sebességugrás válaszfüggvénye
vt2
/2(t) gyorsulásugrás válaszfüggvénye
w(t) súlyfüggvény
x állapotváltozó
xa alapjel
xb beavatkozójel
xb(t), Xb bemenőjel
xe ellenőrző jel
xé érzékelt jel
xk, xk(t), Xk kimenőjel
xm módosítójellemző
xr rendelkezőjel
xs szabályozott jellemző
X1, X2, …, Xn jelek
xz zavarójellemző
y(t) kimenőjel
Y1, Y2, …, Yn tagok jelformáló hatása Y1(s), Y2(s), …, Yn(s) tagok átviteli függvénye
(t) Dirac-impulzus függvény
csillapítási tényező
1, 2, m időállandó
fázisszög
körfrekvencia
TÁBLÁZATOK JEGYZÉKE
3.1 táblázat: A Boole-algebra alaptételei ... 31
3.2 táblázat: A három logikai alapművelet bemutatása: ... 32
3.3 táblázat: A három logikai alapművelet igazságtáblázata ... 32
3.4 táblázat: A logikai algebra szabályai, azonosságai ... 33
3.5 táblázat: Egyváltozós logikai függvények ... 33
3.6 táblázat: Kétváltozós logikai függvények ... 34
3.7 táblázat: Többváltozós NAND kapu logikai kapcsolata ... 37
3.8 táblázat: Többváltozós NOR kapu logikai kapcsolata ... 37
3.9 táblázat: A megtervezett hétszegmenses kijelző igazságtáblája ... 44
4.1 táblázat: Néhány egyszerű függvény és Laplace-transzformáltja ... 60
4.2 táblázat: A tagokat típusuk és a tárolóik száma szerint osztályozhatjuk ... 64
4.3 táblázat: A proporcionális tag súly- és átmeneti függvénye ... 67
4.4 táblázat: A PT1 tag súly- és átmeneti függvénye ... 69
4.5 táblázat: A PT2 tag átmeneti függvénye ... 72
4.6 táblázat: Az I tag súly- és átmeneti függvénye ... 74
4.7 táblázat: Az IT1 tag súly- és átmeneti függvénye ... 76
4.8 táblázat: A DT1 tag súly- és átmeneti függvénye, t0 ... 82
4.9 táblázat: A H tag súly- és átmeneti függvénye ... 86
4.10 táblázat: Az e−sTd tag első-, másod- és harmadfokú PADE-közelítései ... 89
4.11 táblázat: A PT1H tag és átmeneti függvénye ... 89
5.1 táblázat: Integrálkritérium számítása ... 111
6.1 táblázat: A Kp, Ki, Kd paraméterek kimenetre gyakorolt hatásai ... 124
6.2 táblázat: A Ziegler- és Nichols-féle frekvenciaválasz-módszer szerinti beállítás .... 127
6.3 táblázat: A Ziegler- és Nichols-féle átmenetifüggvény-módszer szerinti beállítás .. 128
ÁBRÁK JEGYZÉKE
2.1 ábra: Az irányítási folyamat elvi vázlata ... 16
2.2 ábra: Tag ábrázolása ... 17
2.3 ábra: A jelek felosztása ... 17
2.4 ábra: Az irányítás felosztása ... 19
2.5 ábra A vezérlés működési vázlata ... 19
2.6 ábra: A szabályozás működési vázlata ... 20
2.7 ábra: A hatásvázlat jelképei ... 25
2.8 ábra: Tagok soros kapcsolása ... 25
2.9 ábra: Tagok párhuzamos kapcsolása ... 26
2.10 ábra: Tagok visszacsatolása ... 27
2.11 ábra: Hatásvázlat-átalakítás ... 28
2.12 ábra: Példa hatásvázlat egyszerűsítésére ... 29
3.1 ábra: Logikai függvények grafikus ábrázolása ... 31
3.2 ábra: Vezérléseknél használatos jelölések ... 32
3.3 ábra: Alapfüggvények létradiagramos megvalósítása ... 33
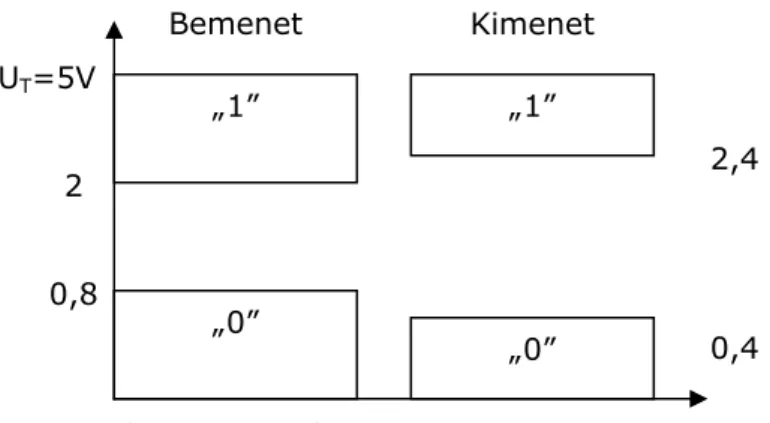
3.4 ábra: A TTL áramkörök logikai szintjei ... 37
3.5 ábra: Minterm és maxterm táblák ... 40
3.6 ábra: Kettes implikánsok ... 41
3.7 ábra: Négyes implikánsok ... 41
3.8 ábra: Nyolcas implikánsok ... 41
3.9 ábra: Logikai függvény megvalósítása kétbemenetű kapukkal-1 ... 43
3.10 ábra: Logikai függvény megvalósítása kétbemenetű kapukkal-2 ... 43
3.11 ábra: Hétszegmenses kijelző ... 44
3.12 ábra: A szegmensek egyszerűsített logikai függvényei ... 45
3.13 ábra: A függvények megvalósítása létradiagramos szimbólumokkal ... 46
3.14 ábra: A megvalósított NEM-ÉS-VAGY hálózat működési állapotai-1 ... 47
3.15 ábra: A megvalósított NEM-ÉS-VAGY hálózat működési állapotai-2 ... 48
3.16 ábra: A PLC (PLV) funkcionális felépítése ... 49
3.17 ábra: A Schneider Zelio Logic család ... 50
3.18 ábra: Az ÉS, VAGY, NEGÁLÁS logikai kapcsolat LD programnyelven ... 51
3.19 ábra: Az ÉS, VAGY, NEGÁLÁS logikai kapcsolat FBD programnyelven ... 51
3.20 ábra: LD programnyelven felfelé és lefelé számláló ... 52
3.21 ábra: Fel- és lefelé számláló megvalósítása FBD programnyelven ... 52
3.22 ábra: Bekapcsolásra való késleltetés (TON)... 52
3.23 ábra: A TON idődiagramja ... 53
3.24 ábra: Kikapcsolásra való késleltetés (TOFF) ... 53
3.25 ábra: A TOFF idődiagramja ... 53
3.26 ábra: Impulzusidőzítő (TP) ... 53
3.27 ábra: A TP idődiagramja ... 53
3.28 ábra: A TON és TOFF időzítő megvalósítása FBD programnyelven ... 54
3.29 ábra: Analóg bemenet kezelése FBD blokkok segítségével ... 54
4.1 ábra: Az átviteli tag vizsgálatának lehetőségei ... 55
4.2 ábra: Lineáris átviteli tag ... 57
4.3 ábra: A tag időtartományban ... 63
4.4 ábra: Az átviteli tag vizsgálatára szolgáló jelek ... 63
4.5 ábra: Az ideális P tag ... 67
4.6 ábra: A P tag Nyquist-féle ábrázolásban ... 68
4.7 ábra: A P tag Bode-féle ábrázolásban ... 68
4.8 ábra: A PT1 tag ... 69
4.9 ábra: A PT1 tag Nyquist-féle ábrázolásban ... 69
4.10 ábra: A PT1 tag Bode-féle ábrázolásban ... 70
4.11 ábra: Az PT2 tag ... 72
4.12 ábra: A PT2 tag Nyquist-féle ábrázolásban ... 73
4.13 ábra: A PT2 tag Bode-féle ábrázolásban ... 73
4.14 ábra: Az I tag ... 75
4.15 ábra: Az I tag Nyquist-féle ábrázolásban ... 75
4.16 ábra: Az I tag Bode-féle ábrázolásban ... 76
4.17 ábra: Az IT1 tag ... 77
4.18 ábra: Az IT1 tag Nyquist-féle ábrázolásban ... 77
4.19 ábra: Az IT1 tag Bode-féle ábrázolásban ... 78
4.20 ábra: Az IT2 tag ... 79
4.21 ábra: Az IT2 tag Nyquist-féle ábrázolásban ... 79
4.22 ábra: Az IT2 tag Bode-féle ábrázolásban ... 80
4.23 ábra: A D tag ... 81
4.24 ábra: A D tag Nyquist-féle ábrázolásban ... 81
4.25 ábra: A D tag Bode féle ábrázolásban ... 82
4.26 ábra: A DT1 tag ... 83
4.27 ábra: A DT1 tag Nyquist-féle ábrázolásban ... 83
4.28 ábra: A DT1 tag Bode-féle ábrázolásban ... 84
4.29 ábra: A DT2 tag ... 85
4.30 ábra: A DT2 tag Nyquist-féle ábrázolásban ... 85
4.31 ábra: A DT2 tag Bode-féle ábrázolásban ... 86
4.32 ábra: A H tag ... 87
4.33 ábra: A H tag Nyquist-féle ábrázolásban ... 87
4.34 ábra: A H tag Bode-féle ábrázolásban ... 88
4.35 ábra: A PHT1 tag ... 90
4.36 ábra: A PHT1 tag Nyquist-ábrázolásban ... 90
4.37 ábra: A PHT1 tag Bode-féle ábrázolásban ... 91
4.38 ábra: A PHT1 tag ... 92
4.39 ábra: Az IH tag Nyquist-ábrázolásban ... 92
4.40 ábra: A PHT1 tag Bode-féle ábrázolásban ... 93
4.41 ábra: A két PT1 tag Bode-diagramja ... 93
4.42 ábra: A PT2 Bode-diagramja ... 94
4.43 ábra: Az IT0 Bode-diagramja ... 95
4.44 ábra: Az IT1 Bode-diagramja ... 95
4.45 ábra: A DT0 Bode diagramja ... 96
4.46 ábra: A DT1 Bode-diagramja ... 97
4.47 ábra: A feladat állapotegyenlete által kapott eredmény ... 99
4.48 ábra: A feladat: átmeneti függvény görbéje ... 100
5.1 ábra: Nyquist-diagram. Bal:0 típusú szabályozás, jobb:1 típusú szabályozás ... 104
5.2 ábra: A Nyquist-kritérium szemléltetése ... 104
5.3 ábra: Felnyitott szabályzási kör hatásvázlata ... 105
5.4 ábra: Stabil szabályozás Nyquist- és Bode-diagramjai ... 106
5.5 ábra: Stabilitásvizsgálat Bode-diagramokkal ... 107
5.6 ábra: Strukturálisan instabil rendszer ... 107
5.7 ábra: Minőségi jellemzők zárt kör átmeneti függvényében ... 108
5.8 ábra: A fázistartalék, az amplitúdótartalék, a vágási körfrekvencia szemléltetése
Nyquist- és Bode-diagramon ... 109
6.1 ábra: Visszacsatolás megvalósítása soros kompenzálással ... 112
6.2 ábra: Az erősítési és az arányossági tényező hatásai ... 114
6.3 ábra PI közelítő fáziskésleltető tag... 115
6.4 ábra: PI kompenzálása PT2 eredőjű rendszerben ... 115
6.5 ábra: PD közelítő fázissiettető tag ... 116
6.6 ábra: PD kompenzálása IT1 eredőjű rendszer fázistartalék-növelésére ... 116
6.7 ábra: PID közelítő kombinált tag maximális szelektivitás esetén ... 117
6.8 ábra: PID tag kompenzálásénak hatása IT1 eredőjű rendszerben ... 117
6.9 ábra: PI, PD, PID szabályozók ugrásjel hatására adott ideális átmeneti függvényei 118 6.10 ábra: Visszacsatolt rendszer ... 118
6.11 ábra: Lengéscsillapított tömeg sémája ... 119
6.12 ábra: A D függvény egységugrásfüggvényre adott válasza ... 120
6.13 ábra: A P szabályozó egységugrásfüggvényre adott válasza ... 121
6.14 ábra: A PD szabályozó egységugrásfüggvényre adott válasza ... 122
6.15 ábra: A PI szabályozó egységugrásfüggvényre adott válasza ... 123
6.16 ábra: A PID szabályozó egységugrásfüggvényre adott válasza-1 ... 124
6.17 ábra: A PID szabályozó egységugrásfüggvényre adott válasza-2 ... 125
6.18 ábra: Az erősítés fáziseltolásának meghatározása Bode-diagram segítségével .... 126
6.19 ábra: Átmeneti függvény közelítésének lehetőségei ... 128
6.20 ábra: Az integrálórész Bode-diagramja ... 129
6.21 ábra: Az integráló- és az arányos rész Bode-diagramja ... 130
6.22 ábra: A kompenzált rész Bode-diagramja ... 130
6.23 ábra: Az új vágási frekvencia és fáziseltolás Bode-diagramja ... 132
1. AZ AUTOMATIZÁLÁS JELENTŐSÉGE
A társadalom célja a jólét megteremtése a tagjai számára, s ez anyagi javak termelésével érhető el. Egy társadalmat akkor tekintünk technikailag fejlettebbnek egy másiknál, ha több és jobb termék előállítására képes. A régi korokban az anyagi javak termeléséhez szükséges munkát kizárólag – vagy majdnem kizárólag – emberi, ill. állati erővel végezték el.
Később a gépek átvették az ember szerepét a nehéz fizikai munkában, ill. lehetővé tették egy sor olyan feladat elvégzését, amely kizárólag emberi erővel lehetetlen lett volna. A gépeket azonban irányítani kell, ez pedig az ember feladata. A technikai haladás egyre bonyolultabb gépeket teremt, amelyek irányítása egyre nehezebb feladat. Nehezebb azért, mert a gépek gyorsabb működése gyorsabb beavatkozást is kíván, és a feladatok összetettségüknél fogva sok szempont egyidejű mérlegelését teszik szükségessé. Az ember az irányítótevékenységet is igyekszik egyre nagyobb mértékben a gépekre bízni, azaz automatizálni őket.
Az automatizálás az a tevékenység, amelynek eredményeképpen az ember irányítószerepét gépek, berendezések veszik át. Az automatizálás még nem nagy múltú, de jelentős eredményei alapján megalapozott a feltételezés, hogy széles körű elterjedése hasonló eredményekkel fog járni, mint járt a gépek alkalmazása a termelésben, azaz az
„ipari forradalom” során. Ennek értelmében nevezik az automatizálást második ipari forradalomnak.
Amikor a gépek, berendezések egyre bonyolultabbakká váltak, az emberi érzékszervek egyre kevésbé feleltek meg, az emberi érzékszervek kiváltására észlelőberendezéseket, illetve -műszereket kellett alkalmazni. A műszerezés nagymértékben segítette, sőt egyes esetekben helyettesítette az ember megfigyelő-, érzékelő-, mérő-, ellenőrző tevékenységét.
A kézi irányítás a műszerezésnek köszönhetően pontosabbá, megbízhatóbbá, hatékonyabbá vált.
A fejlődésnek ezen a fokán megteremtődtek annak a feltételei is, hogy az irányítás legfontosabb mozzanatát, az ítéletalkotást (döntést) és a vele kapcsolatos rendelkezést (beavatkozást) is gépi berendezésekre lehetett bízni; az ember az irányítás műveletének gépesítése, azaz az automatizálás révén felszabadult a gépek, berendezések sokszor megerőltető, egyhangú, ismétlődő és sok esetben az ember teljesítőképességét is meghaladó közvetlen, direkt működtetése alól. Kezdetben az automatizálás is részleges volt, csak egyes munkafolyamatokra terjedt ki, napjainkban viszont egyre gyakrabban vagyunk tanúi a bonyolult, összetett folyamatokra, sőt akár teljes üzemekre, gyárakra
kiterjedő komplex automatizálásnak. Minthogy a komplex automatizálás számos bonyolult folyamat fizikai paramétereinek érzékelését, rendkívül sok és összetett ítéletalkotó tevékenység „gépesítését” teszi szükségessé, igen nagy szerepet kaptak és kapnak ma is az ítéletalkotó fázisok elvégzésében a folyamatirányító számítógépek.
Az automatizálás műszaki előfeltétele a gépesítés. Természetes, hogy a műszaki feltételek megléte mellett a gazdasági indokok, feltételek megléte is elengedhetetlen, hiszen az automatikus gépek, berendezések nem lehetnek öncélú alkotások, hanem végső soron a termelés mennyiségének fokozói, és ami legalább ilyen fontos, minőségének javítói. Adott munkafolyamat részleges vagy teljes körű automatizálása tehát csak akkor lehet indokolt, ha a befektetett szellemi és anyagi érték az automatizált termelés folyamán megtérül.
Az automatizálás előfeltételei:
• megfelelő gépesítés,
• magas színvonalú technológia,
• biztonságos üzemmenet,
• megfelelő műszerezettség,
• nagy termékmennyiség előállítása (gyártmányok sorozat-, ill. tömeggyártása),
• a technológiai folyamatok egyes paramétereinek, azok összefüggéseinek kellő ismerete,
• megbízható automatikaelemek,
• jól felkészült szakemberek.
Az irányítástechnika (automatika) a műszaki tudományok egyik ága, s a gyártási folyamatok, a gépi műveletek önműködő (automatikus) irányításával foglalkozik.
Az irányítástechnika főbb területei a következők:
• Az irányításelmélet az önműködő irányítás törvényszerűségeit, feltételeit vizsgálja.
• Az irányítószervek (elemek) technikája az irányítás gyakorlati megvalósításához szükséges berendezések kidolgozásával, felhasználásával foglalkozik.
• Az alkalmazott automatika a különféle iparági (pl. gépipari, vegyipari, kohászati), közlekedési, mezőgazdasági stb. folyamatok önműködő irányításával kapcsolatos.
2. IRÁNYÍTÁSTECHNIKAI ALAPFOGALMAK
A műszaki-technológiai folyamatokra jellemző, hogy ezeket a megfelelő pillanatban kell megindítani, majd leállítani, s kimenetelüket tervszerűen kell befolyásolni. E folyamatokkal kapcsolatos tevékenységet irányításnak nevezzük. Az irányítás tehát olyan művelet, amely valamely folyamatot elindít, fenntart, megváltoztat vagy megállít. Az irányítás során egy nagy energiatartalmú folyamatot általában kis energiájú hatásokkal befolyásolunk.
Az irányítási folyamatok műveletei a következők:
• érzékelés: információszerzés az irányítandó folyamatról,
• ítéletalkotás: az értesülés alapján döntés a rendelkezés szükségességéről,
• rendelkezés: utasítás a beavatkozásra,
• jelformálás: a beavatkozás módjának meghatározása (jelmódosítás, jelerősítés),
• beavatkozás: az irányítandó folyamat befolyásolása.
Amíg az irányítás alacsony energiaszinten valósul meg, addig a beavatkozáshoz már rendszerint nagyobb energiák szükségesek. Az irányított folyamat tényleges megvalósulásáról az érzékelőszervek (szenzorok) révén lehet értesülést (információt) szerezni. Maga az ítéletalkotás jelentheti annak eldöntését, hogy két jellemző egyenlő-e, illetve, ha nem, akkor melyik a nagyobb közülük. Gyakran tehát az ítéletalkotás (előjelhelyes) összegzést vagy bizonyos logikai műveletek elvégzését jelenti. Az ítéletalkotás eredménye a rendelkező hatás, amely a szükséges jelátalakítások után eljut a beavatkozószervhez; ez a szerv hajtja végre a rendelkezést.
Az irányítás célja:
Egy folyamat egy vagy több jellemzőjét (ezek az irányított jellemzők) adott értéken tartani (a zavaró jellemzők ellenére), vagy adott törvényszerűség szerint változtatni azokat.
Ha a teljes irányítási folyamat kezelőszemélyzet beavatkozása nélkül megy végbe, akkor önműködő irányításról, ha az irányítás valamely műveletét kezelőszemélyzet végzi, akkor kézi irányításról beszélünk.
2.1 ábra: Az irányítási folyamat elvi vázlata
A hatásláncon hatások (jelek) terjednek tovább, mégpedig a nyilakkal jelzett irányban. A hatások haladása nincs anyag-, ill. energiaáramláshoz kötve. E hatások hordozói, azaz a jelhordozók különféle mérhető fizikai, kémiai paraméterek (pl. levegőnyomás, villamos áram, ill. feszültség stb.) lehetnek.
A jel legfőbb sajátossága az információtartalom, a jel energiaszintje csupán másodlagos jelentőségű. A jel a jelhordozó minden olyan értéke vagy értékváltozása, amely alkalmas a hozzárendelt információ megszerzésére, továbbítására vagy tárolására. Az irányított folyamat állapotát jellemző, ill. befolyásoló paramétereket (pl. hőmérséklet, nyomás, koncentráció stb.) jellemzőknek nevezzük.
Az irányítási rendszert az irányított és az irányítóberendezés együttese képezi. Előbbi az irányítás tárgya (az irányítástól egyébként függetlenül meglévő műszaki létesítmény, berendezés, gép, technológiai egység), utóbbi azon szervek összessége, amelyek révén az irányítás megvalósul.
A szerv önállóan végzi el az irányítás valamely részműveletét, az irányítási rendszert gyakran egymással összeépített szerkezeti elemek alkotják. Az elem irányítástechnikai szempontból tovább már nem bontható szerkezeti egység. Az egyes szervek között a jeleket a jelvivő vezetékek viszik át.
Válasszunk ki tetszés szerint egy szervet (elemet) az irányítás hatásláncából. A szervet működtető jelet (bemenőjel) tekintsük az oknak, s a szerv működése következtében létrejött jel (kimenőjel) lesz az okozat, azaz a kimenőjel a bemenőjel függvénye. Az egyes szervek adott bemenőjelből más és más kimenőjelet képezhetnek aszerint, hogy milyen jelformáló, jelátvivő tulajdonsággal rendelkeznek.
A szervek jelformáló tulajdonságait képviselő fogalmat tagnak (2.2 ábra) nevezzük, amely megadja, hogy milyen differenciálegyenlettel, függvénnyel jellemezhető törvényszerűség szerint történik a jelformálás, a jelátvitel. A tag tehát független a szerkezeti kiviteltől. A továbbiakban a visszahatásmentes tagokat tételezünk fel, azaz a jel a tagon a bemenőjel felől a kimenőjel felé mutató irányban halad. Az irányított berendezés jelátvivő sajátosságait jellemző tagot irányított szakasznak nevezzük.
Érzékelő Ítéletalkotó
Jelformáló Módosító Termelési folyamat Bemenő energia
Bemenő anyag
Kimenő energia Kimenő anyag
Beavatkozás
Rendelkezés
Információ Információ
2.2 ábra: Tag ábrázolása
Az irányítás során különböző hatások haladnak tovább az irányítási lánc egyes elemein, amíg a rendelkezés, illetve a beavatkozás hatásra a termelési folyamatot a kívánt mértékben befolyásoljuk.
ELEM: Az irányítástechnikai szempontból tovább már nem bontható szerkezeti rész (pl.
hidraulikus vagy pneumatikus szelep, kapcsoló, érintkező, tranzisztor stb.). Az elem egy vagy több alkatrészből állhat.
SZERV: szerkezeti elemek egy bizonyos célból összeállított, adott funkciójú, szervezetten működő egysége (pl. erősítő, érzékelő, LCD-kijelző stb.). A szerv egy vagy több elemből állhat.
IRÁNYÍTÁSI RENDSZER: szervek irányítási, szabályozási célból létrehozott rendszere.
JEL: olyan fizikai mennyiség, állapothatározó (vagy ezek megváltozásai), amelynek információtartalma van.
JELLEMZŐ: a folyamat olyan jele, amely irányítás nélkül is jelen lenne, és azzal közvetlen kapcsolatban áll.
TAG: az elem, szerv vagy berendezés (működés szempontjából bármely önálló rész) dinamikus sajátosságainak kifejezésére létrehozott elvonatkoztatás, absztrakció.
2.1. A jelek felosztása
A jel valamely fizikai állapothatározó (jelhordozó) minden olyan értéke vagy értékváltozása, amely alkalmas az egyértelműen hozzárendelt információ megszerzésére, továbbítására vagy tárolására. A jel a konkrét fizikai folyamattól elvonatkoztatott absztrakt fogalom, amely nem az energetikai, hanem az informatikai tulajdonság hordozója. Jelhordozó lehet minden mérhető fizikai (kémiai) állapothatározó (mennyiség). A jeleket feloszthatjuk az ábrán látható szempontok szerint.
2.3 ábra: Jelek felosztása Forrás: [3]
TAG Xb
Bemenő jel
Xk Kimenő jel
a. Az értékkészlet szerint:
FOLYTONOS a jel, ha – meghatározott tartományban – tetszés szerinti értéket felvehet és értékkészlete folytonos (2.3 ábra a, b, d, e). A folytonos jelmodellek leírásához hatékony matematikai apparátus áll rendelkezésre, kissé hátrányt jelent azonban, hogy ez nem illeszkedik közvetlenül a digitális jelfeldolgozás széles körben elterjedt eszközeihez.
SZAKASZOS (nemfolytonos) a jel, ha csak meghatározott, diszkrét értékeket vehet fel, két szomszédos diszkrét értéke közötti értékkészlete hiányzik (2.3 ábra c, f, g, h).
Bizonyos, a gyakorlat szempontjából nem túl szigorú feltételek (a mintavételi törvények) teljesülése esetén a diszkrét jelekkel történő rendszerleírás a folytonos esettel egyenértékű leírást ad. A kitüntetett tér- és időpontok egyenletes elhelyezkedése esetén a diszkrét jelmodellek leírására is legalább olyan hatékony matematikai eszközök állnak rendelkezésre, mint folytonos esetben. Kedvező, hogy e módszerek jól illeszkednek a digitális jelfeldolgozás eszközeihez.
b. Az időbeli lefolyás szerint:
FOLYAMATOS a jel, ha – adott időtartományban – megszakítás nélkül fennáll (2.3 ábra a, b, c, g).
SZAGGATOTT (nemfolyamatos) a jel, ha csak meghatározott időközönként és időtartamban szolgáltat információt, időközönként megszakad (2.3 ábra d, e, f, h).
c. Az információ megjelenési formája szerint:
ANALÓG a jel, ha az információt a jelhordozó értéke vagy értékváltozása közvetlenül képviseli (2.3 ábra a és c modulálatlan analóg; b, d, e, f modulált analóg jel időfüggvényét).
DIGITÁLIS a jel, ha az információ a jelhordozó számjegyet kifejező, diszkrét, jelképi értékeiben (kódjaiban) van jelen (2.3 ábra a és g binárisan kódolt, h soros kód segítségével előállított digitális jel időfüggvényét).
d. Az érték meghatározottsága szerint:
DETERMINISZTIKUS a jel, ha értéke meghatározott időfüggvénnyel egyértelműen megadható (2.3 ábra valamennyi jele). Determinisztikus jelmodellt használunk, ha a jelet létrehozó kölcsönhatások kimenetele a megfigyelő számára egyértelműen meghatározottnak tűnik.
SZTOCHASZTIKUS a jel, ha véletlen lefolyású, és csak valószínűség számítási módszerekkel írható le. Sztochasztikus jelmodellt használunk, ha a jelet létrehozó kölcsönhatások kimenetele a megfigyelő számára véletlennek tűnik elsősorban abból adódóan, hogy a kölcsönhatások létrejöttének okát azok nagy száma és bonyolultsága miatt nem ismeri, vagy a jelenség fizikai természetéből adódóan nem ismerheti.
2.2. Az irányítástechnika felosztása
Az irányítás közvetlen célja: egy folyamatba alkalmas helyen úgy beavatkozni, hogy a beavatkozás következtében egy adott paraméter állandó értéken maradjon, vagy meghatározott módon változzon a zavaró hatások ellenére. A beavatkozás pillanatnyi eredménye vagy visszahat a további beavatkozásra, vagy nem befolyásolja azt. Eszerint az irányításnak két fő csoportját, a VEZÉRLÉST és a SZABÁLYOZÁST különböztetjük meg.
2.4 ábra: Az irányítás felosztása 2.2.1. A vezérlés
A vezérlés művelete során az xr rendelkezőjel végighalad a vezérlőberendezés alkotó szerkezeti egységein, az ún. szerveken. A 2.5 ábrán látható működési vázlat utolsó szerve a beavatkozószerv, amelynek feladata a vezérelt berendezés (szakasz) anyag- és energiafolyamatának célirányos befolyásolása.
2.5 ábra: A vezérlés működési vázlata Forrás: [4]
Vezérlésnél az irányító személynek (vagy önműködő berendezésnek) az irányított folyamatban ténylegesen lejátszódó változásokról nincs folyamatos információvaja, így azokat figyelembe venni sem tudja. A beavatkozás eredménye tehát nem hat vissza a vezérlőberendezésre, a rendszerre ható zavaró hatásokat nem képes kiküszöbölni. A vezérlés hatáslánca nyitott.
2.2.2. A szabályozás
A szabályozás művelete során (2.6 ábra) az xr rendelkezőjel egy előzetesen megadott xa alapjelnek és az – xs szabályozott jellemző pillanatnyi értékétől függő – xe ellenőrző
IRÁNYÍTÁS
VEZÉRLÉS SZABÁLYOZÁS
Kézi vezérlés
Önműködő vezérlés
Kézi szabályozás
Önműködő szabályozás
jelnek a különbsége. Az xr rendelkezőjel (más néven hibajel) – rendszerint egy jelformáló és erősítőszerven végigfutva – az xb beavatkozójellel működésre készteti a beavatkozószervet. A beavatkozószerv kimenőjele, az xm módosított jellemző olyan hatást vált ki a szabályozott berendezésben, amely az xs szabályozott jellemzőnek az előírt értéktől való eltérését igyekszik megszüntetni. A megkívánt, előírt hatás kiváltásával, elérésével a szabályozás művelete befejeződött.
2.6 ábra: A szabályozás működési vázlata Forrás: [4]
A szabályozott berendezésre természetesen hatnak az xz zavarójellemzők. Igen gyakran éppen azért alkalmaznak szabályozóberendezéseket, hogy segítségükkel a nemkívánatos zavaró hatásokat kiküszöböljék. A szabályozás művelete tehát úgy befolyásolja a műszaki folyamatot, hogy az xs szabályozott jellemző megváltozása visszahat a hatáslánc elejére; ha eltérés mutatkozik az xa alapjel és az xe ellenőrző jel között, létrejön egy ún.
szabályozási eltérés, egy xr rendelkezőjel (hibajel), amely az előzőekben leírt módon fejti ki hatását.
Szabályozásnál a szabályozott jellemző értékét egy ellenőrző szerv (érzékelő) figyeli, és eltérés esetén (azaz abban az esetben, ha a folyamat lefolyása eltér az előírttól) megváltoztatja a rendelkezőjelet, és mindaddig korrigál, amíg a folyamat ismét az előírás szerint zajlik. A szabályozás hatáslánca zárt. A szabályozási művelet a negatív visszacsatolás elve alapján valósul meg.
2.2.3. A vezérlés és a szabályozás összehasonlítása a. Hatáslánc:
Azt kell megvizsgálnunk, hogy az irányítani kívánt jellemző változása visszahat-e az irányítási folyamatra, zárt- vagy nyitott–e az irányítás hatáslánca.
Vezérlésnél az irányított jellemző nem esik egybe a folyamatosan érzékelt és az irányítóberendezéshez továbbított jellemzővel. Így a vezérelt jellemző alakulása nem befolyásolja a folyamat menetét, nincs visszahatás, azaz a vezérlés hatáslánca nyitott.
Szabályozásnál az irányított jellemzőt ellenőrizzük folyamatosan, s ennek időbeli alakulása, az elérni kívánt alapértéktől való különbsége szabja meg a folyamatba való beavatkozást. A szabályozás általában negatív visszacsatolás alapján valósul meg, hatáslánca zárt.
b. Zavarójellemző:
Arra kell választ adni, hogy a kialakított irányítási rendszer mely zavarójellemzők hatását képes kompenzálni
Vezérlés esetén csupán az előre számításba vett és folyamatosan érzékelt zavaró jellemző (pl. a hűtendő folyadék betáplálásának ingadozása) hatását tudjuk kompenzálni.
Szabályozás kialakításával – adott határokon belül – számos, előre számításba nem vett zavaró hatás is ellensúlyozható.
c. Az irányítási eltérés:
Az összehasonlítás alapja az, hogy az irányított jellemző elérni kívánt értékét (pl. 25 °C- os termékhőmérséklet) a tényleges érték (pillanatnyi termékhőmérséklet) – helyesen beállított irányítási műveleteket feltételezve – hogyan közelíti meg.
Vezérlést alkalmazva – amennyiben csak számításba vett zavarójellemző hat – még átmenetileg sincs vezérlési eltérés.
Szabályozáskor kismértékű, ideiglenes szabályozási eltérés – a visszacsatolás következtében – nem kerülhető el.
d. Az irányítási rendszer ismerete:
E szempont azt célozza, hogy milyen mélységben kell ismerni az irányítandó folyamat és az irányítószervek viselkedését.
A vezérlés kialakításához feltétlenül szükséges az irányítási rendszer működésének leírására alkalmas, pontos matematikai összefüggések ismerete, továbbá valamennyi szerv viselkedését megszabott korlátok között kell tartani.
Szabályozás megvalósításánál legtöbbször nem szükséges a szabályozási rendszer mélyreható matematikai elemzése, s az egyes szervek működése sem oly mértékben korlátozott, mint a vezérlés esetén.
e. Stabilitás:
A stabilitás az irányítási rendszer működési sajátossága. Vizsgálatakor azt kell eldöntenünk, hogy az irányított paraméter bizonyos idő elteltével állandósul, vagy lengéseket végez–e.
A vezérlés a nyílt hatásláncból adódóan mindig stabil.
A szabályozás labilissá válhat.
Az összehasonlításból kiderül, hogy a szabályozásnak a vezérléshez képest számos előnye van. Azonban a vezérlést kell a szabályozással szemben előnyben részesíteni, ha az előírt érték átmenetileg sem léphető túl, vagy az irányítandó berendezésre (folyamatra) csak az ellenőrzött zavarás hat. Gyakran előfordul, hogy egyazon irányított rendszeren mind szabályozási, mind vezérlési műveletek végzésére van lehetőség (pl. az önműködő folyamatszabályozási rendszer kialakításánál az indítási és a leállási műveletek végzéséhez vezérlési rendszert is kiépítenek).
2.3. A vezérlés és a szabályozás csoportosítása
a. A rendelkezés létrejötte szerint:
kézi (akaratlagos),
önműködő
vezérlést és szabályozást különböztetünk meg. Az irányítás során szükséges–e tudatos emberi közreműködés, vagy nem.
Az irányítás kézi, ha a kezelőszemély végzi például:
− a termék hőmérsékletének ellenőrzését (leolvassa a hőmérő pillanatnyi állását),
− az ítéletalkotást (a pillanatnyi értéket összehasonlítja pl. 25 °C-kal vagy az elérendő értékkel),
− a rendelkezést (a szelepet zárni kell),
− a beavatkozást (zár a szelepen).
Ha az előbbi műveletek bármelyike nem önműködően történik, már kézi irányításról beszélünk.
b. Az elvégzett tevékenység szerint ismeretes:
értéktartó szabályozás,
követő- (arány-, helyzet-) szabályozás,
időterv-szabályozás,
program- (időterv-, lefutó) vezérlés,
követővezérlés, ismertetés.
Az ÉRTÉKTARTÓ SZABÁLYOZÁSNÁL a szabályozott jellemző állandó értéken tartása.
KÖVETŐSZABÁLYOZÁSNÁL egy időben előre nem ismert módon változó alapjel követése a cél.
A követőszabályozás egyik formája az ARÁNYSZABÁLYOZÁS, ilyenkor két vagy több jellemző arányát kell állandó értéken tartani. (Kazánok, kemencék tüzelésszabályozásánál a terheléstől függően nemcsak a tüzelőanyag-betáplálást kell módosítani, hanem vele együtt – a légfelesleg által megszabott arány szerint – az égetéshez szükséges levegőáramot is. Elegyedési folyamatoknál, keverékek készítésénél, homogenizálásnál, kémiai reakcióknál akkor nyerhető előírt minőségű termék, ha bizonyos tömegarányokat állandósítanak a betáplálási áramokban.)
A követőszabályozás másik fajtája a HELYZETSZABÁLYOZÁS. Ezen esetben a szabályozott jellemző mechanikai elmozdulás (pl. autóbuszok, repülőgépek szervokormányának kialakításánál alkalmazzák).
Az IDŐTERV-szabályozás esetén az alapjel egy időben előre megadott függvény (program) szerint változik, melyet a szabályozott jellemzőnek követnie kell (pl. egyes szárítási műveleteknél a hőmérséklet és a légnedvesség kívánatos alakulását programszabályozással valósítják meg a megfelelő termékminőség biztosítása és a fajlagos hőenergia-igény csökkentése érdekében).
A programvezérlés egyik formája az időtervvezérlés, a másik a lefutó vezérlés. Az időtervvezérlésnél egy időtől függő program határozza meg a beavatkozást. Lefutó vezérlésnél bizonyos feltételek teljesülése indítja el a folyamat következő szakaszát (pl.
önműködő felvonók vezérlése).
c. A működési mód szerint megkülönböztetünk:
folytonos,
nemfolytonos (állásos, digitális) irányítást.
FOLYTONOS szabályozás esetén a hatáslánc bármely helyén a jelek folytonosan (szakadás nélkül) változnak, NEMFOLYTONOS szabályozásnál egyes szervek működésük során csak meghatározott, diszkrét állapotot vesznek fel (pl. egy relé meghúz vagy elenged, egy mágnesszelep nyitott vagy zárt állapotban van). A nemfolytonos szabályozások kategóriájába sorolhatók a mintavételes (digitális) szabályozások is.
d. A segédenergia szerint megkülöntöztetünk:
segédenergia nélküli (az irányított rendszerből vett energiával működő),
pneumatikus (a jelhordozó a sűrített levegő nyomása),
hidraulikus (a jelhordozó a működtető folyadék nyomása),
villamos (a jelhordozó villamos áram vagy feszültség),
kombinált (elektropneumatikus, elektrohidraulikus) irányítási rendszereket.
Egy termelési folyamat teljesen önműködő megvalósítása már komplex automatizálási feladatot jelent. Az összetett irányítási eljárások az analóg működésű irányítóberendezések mellett rendszerint digitális folyamatirányító számítógépet is igényelnek.
A későbbiek során főként az önműködő, értéktartó, folytonos szabályozással kapcsolatos problémákat tárgyaljuk.
2.4. Az irányítási rendszer ábrázolása
A hatáslánc az irányítási rendszer (az irányítási rendszert az irányított és az irányító berendezés együttesen alkotja) azon szerkezeti egységeinek sorozata (láncolata), amelyeken keresztül az irányítási hatás érvényesül. Az irányítási rendszer szerkezeti vázlattal, működési vázlattal és hatásvázlattal ábrázolható. A 2.1 ábra a hatáslánc szerkezeti részeinek, a 2.2 ábra a szerkezeti egységektől elvonatkoztatott „tagjainak”
jelképes ábrázolási módja.
• A szerkezeti vázlat az irányítási rendszer olyan vázlatos vagy jelképes ábrázolási módja, amely főként a rendszer irányítási szempontból lényeges részeit tünteti fel.
• A működési vázlat a hatáslánc szerkezeti részeinek jelképi ábrázolását tartalmazza. A szerkezeti egységeket téglalapok, míg a jelek útját hatásvonalak jelképezik. Gyakran alkalmazott ábrázolási mód, ilyen működési vázlat az 2.1 ábra is.
• A hatásvázlat a hatáslánc elvi, elvonatkoztatott ábrázolásmódja, amelyben a tagokat és jeleket egyszerű geometriai alakzatok jelképezik (2.2 és 2.7 ábra). Az irányítástechnikai tagokat ábrázoló jelképekbe esetenként beírt vagy berajzolt függvény a tag statikus vagy dinamikus viselkedését jellemzi. A hatásvázlatnak két fajtáját, a tömbvázlatot és a jelfolyamábrát különböztetjük meg, amelyek jelképeit a tagok alapkapcsolásai esetén a 2.7 ábra tartalmazza. (Az Y a tag dinamikai tulajdonságait jellemző függvényt jelöli.)
A hatásvázlat részei:
• a tag,
• az irányított szakasz,
• a hatásirány és
• a jelek.
Az irányítástechnikai TAG (röviden: a tag) elvonatkoztatás, absztrakció útján nyert fogalom, amely az irányítási rendszer (hatáslánc) valamely tetszés szerint kiválasztott részének jelformáló tulajdonságát fejezi ki. A tagot a jelformáló hatását egyértelműen kifejező, leíró matematikai alakkal (differenciálegyenlettel, függvénnyel) vagy grafikusan (jelleggörbével) adhatjuk meg.
IRÁNYÍTOTT SZAKASZNAK nevezzük azt a tagot, amely az irányított berendezés (folyamat) jelátviteli tulajdonságait írja le. Az irányított szakasz irányítása során annak egyes (fizikai) mennyiségeit módosítják, ennek révén érik el – a kívánt célnak megfelelően – más jellemző fizikai mennyiségek megváltoztatását. Az irányított szakasz bemenőjelei a módosított jellemzők; míg a kimeneten az irányított jellemzők jelennek meg. A gyakorlatban használatos irányítóberendezések esetében minden esetben számítani kell ún. zavaró jellemzőkre is, amelyek gyakran váratlanul, akaratunktól függetlenül zavarják az irányítás teljes folyamatát.
A jel a tagon csak egy irányban, a HATÁSIRÁNYBAN haladhat, visszafelé nem fejthet ki hatást.
A BEMENŐJEL a tagot működésre késztető független, külső jel. A tag működése során, annak eredményeként létrejövő jel a kimenőjel. A KIMENŐJEL tehát egyrészt a bemenőjeltől, másrészt a tag módosító, jelformáló hatásától függ.
MEGNEVEZÉS ÉS MATEMATIKAI ÖSSZEFÜGGÉS
HATÁSVÁZLAT
Tömbvázlat Jelfolyamábra Jel – elágazás
3
1
X
2X
X
Jel – összegzés
3 2
4
X
1X X
X
Tag, bemenő- és kimenőjelek
1
2 Y X
X Tagok által módosított jelek összegzése
2 2 1 1
3
Y X Y X
X
X1
Y X2 X1 Y X2
X1
X2
X3
Y1 -Y2
X3
X1 1 X4
X2 -1 1
X1
Y1
X3
X2
Y2
X2 X4
X1
-X3
X2
X3
X1 1
X3 1 X2 X1
Tagok párhuzamos kapcsolása
1 2 1
2 (Y Y ) X
X
Tagok soros kapcsolása
1 1 2 2 2
3
Y X Y Y X
X
Visszacsatolás
1 2 1 2 1
1 X
Y Y X Y
2.7 ábra: A hatásvázlat jelképei
A hatásláncban haladó jeleket folytonos egyenes vonalak, a hatásirányt pedig nyilak jelölik. A jelek összegképzésének, illetve különbségképzésének jelképe egy sík negyedekre osztott kör. A negatív előjellel belépő jel körcikkét besötétítik, és többnyire a negatív előjelet is feltüntetik.
Figyelem! A jelek általában valamilyen fizikai jellemzővel, dimenzióval rendelkeznek!
Összekapcsolni csak az azonos mértékegységűeket szabad! Figyelembe veendő továbbá, hogy a tagok idealizáltak, tehát pl. bemenetük nem terhel, és kimenetük tetszőlegesen terhelhető, valamint nem rendelkeznek visszahatással. (Ha mégis, úgy tagcsoport eredőjeként kell ezt figyelembe venni.)
2.5. A rendszerelemek kapcsolási módjai
Műszaki rendszerek, objektumok vizsgálatánál, jellemzésénél meg kell határoznunk a vizsgált rendszer határait, fel kell bontani a rendszert elemeire (részrendszerekre), s szükséges megismernünk az elemek kapcsolódását, egymásra hatását. Az elemek közötti ok-okozati kapcsolatok szemléletesen ábrázolhatók a hatásvázlat segítségével. A továbbiakban a rendszerelemek, a teljes rendszer jelátvitelének elemzésénél a jelátviteli tag, tagcsoport fogalmat használjuk.
A jelátviteli tagok között alapvetően a következő kapcsolatok adhatók meg:
soros kapcsolás,
párhuzamos kapcsolás,
visszacsatolás.
2.5.1. Soros kapcsolás
2.8 ábra: Tagok soros kapcsolása
Tekintsük a 2.8 ábrán látható n számú, egymással sorba kapcsolt jelátviteli tagot. Legyen ismert az egyes tagok Yi(s) átviteli függvénye. Ismeretes, hogy minden tag
X1
Y1
X2
Y2
X3
X1
Y1
X2
Y2
X3
X1
Y1 Y2
X2
Y1
X2
Y2
X1
±
X2
X1
Y1
Y2
X2
X1
Y1
±Y2
Y1(s) X1(s)
Y2(s)
X2(s) X3(s)
Yn(s) Xn+1(s) Xn(s)
…
kimenőjelének Laplace-transzformáltja az átviteli függvény definíciója szerint a bemenőjel Laplace-transzformáltjának és a tag átviteli függvényének ismeretében a következőképpen fejezhető ki:
s Y s X s
X
i1
i i az i-edik tagra, (2.1)illetve
s Y s X s
X
n1
n n az utolsó tagra. (2.2)Minden tag bemenőjele azonos az azt megelőző tag kimenőjelével. Tehát az egyenletet a hatásláncban a legutolsó tagra célszerű felírni, s a bemenőjel Laplace-transzformáltjába mindig a megelőző tag átviteli függvénye és bemenőjele transzformáltjának szorzatát behelyettesítve eljutunk a tagcsoport bemenőjeléig:
s Y s Y s Y s Y s X s
X
n1
n n1...
2 1 1 , (2.3)amelyből kifejezhető a sorba kapcsolt tagok eredő átviteli függvénye:
Y s Y s Y s Y s s
X s s X
Y
n n n 1 2 11
1
...
. (2.4)Tehát a tagok sorba kapcsolása esetén az egyes átviteli függvények szorzata adja az eredő függvényt.
2.5.2. Párhuzamos kapcsolás
2.9 ábra: Tagok párhuzamos kapcsolása
Kapcsoljunk össze n darab jelátviteli tagot a 2.9 ábra szerint. A hatásvázlatban ponttal jelölt elágazási hely után valamennyi elágazásban azonos információ (X
1(s)) halad tovább és jut az egyes elemek bemeneteire. Az előbbiekhez hasonló gondolatmenet, illetve a 2.6 ábra alapján az eredő átviteli függvény:
.
...
2 1
1
1 1
2 1 1 1
2
s Y s
Y s Y
s X
s X s Y s
X s Y s X s Y s X
s s X
Y
n
n
(2.5)
Tehát párhuzamosan kapcsolt tagok esetén az eredő az egyes átviteli függvények összegeként adódik.
X1(s)
Y1(s) Y1(s)X1(s)
X2(s) .
. . Y2(s)
Yn(s)
Y2(s)X1(s)
Yn(s)X1(s)
2.5.3. Visszacsatolás
2.10 ábra: Tagok visszacsatolása
A visszacsatolást az jellemzi, hogy az előremenő ágban lévő tag kimenőjele a visszacsatoló ágban lévő tagon keresztül visszajut bemenetére, s előjelhelyesen összegeződik a bemenőjellel. Két esetet különböztetünk meg: a pozitív és a negatív visszacsatolást (2.10 ábra). Az előző kapcsolásoknál már alkalmazott összefüggések, illetve a 2.10 ábra alapján:
s Y
s
X s X
sY s
X2 1 1 2 2 ;
s
Y
sY s
Y
s X sX2 1 1 2 1 1 .
Az eredő átviteli függvény tehát pozitív visszacsatolás esetén:
s Y s Y
s Y s
X s s X
Y
2 1
1 1
2
1
,
(2.6)illetve negatív visszacsatolásnál:
s Y s Y
s s Y
Y
2 1
1
1
. (2.7)Az Y1
sY2 s szorzatot hurokátviteli függvénynek nevezik.2.6. Hatásvázlatok átalakítása
Az összetett rendszerek vizsgálatához szükség van a hatásvázlat ismeretére. A rendszervizsgálat esetenként egyszerűsíthető a hatásvázlatok egyenértékű átalakításával, s így egyszerűbben határozhatók meg az eredő átviteli függvények, egyéb rendszerjellemzők. A 2.11 ábra a legfontosabb átalakítási szabályokat foglalja össze. A hatásvázlatokban a jelek Laplace-transzformáltjai és az átviteli függvények szerepelnek, de azonos átalakítási szabályok vonatkoznak a Fourier-transzformáltakra és a frekvenciafüggvényekre is.
Y1(s)
X2(s)
Y2(s) X1(s)±X2(s)Y2(s)
X2(s)Y2(s) X1(s)
±
Egyenértékű hatásvázlatok
eredeti átalakított 1.
2.
3.
4.
5.
6.
7.
8.
2.11 ábra: Hatásvázlat-átalakítás
X3(s) X2(s) Y(s)
Y(s) X1(s)
X1(s)
X3(s) X2(s) Y(s)
1/Y(s)
Y(s)
X1(s) X3(s)
X2(s) X1(s)
X2(s)
X3(s) Y(s)
Y(s) X1(s)
Y(s) X2(s)
X3(s) X1(s)
X2(s)
X3(s) Y(s)
X2(s) X1(s) X1(s) X2(s)
X1(s)
X3(s) X2(s)
X4(s) X1(s)
X2(s) X3(s)
X4(s) Y1(s) X2(s) Y2(s)
X1(s)
± Y2(s) X1(s)
Y1(s) X2(s)
Y3(s)
) ( ) ( 1
) (
2 1
1
s Y s Y
s Y
X1(s) X2(s)
Y1(s)+Y2(s)+Y3(s)
X1(s) X2(s)
Y1(s)Y2(s)Y3(s)
X1(s) X2(s)
X1(s)
Y1(s) Y2(s) Y3(s) X2(s)
Az átalakítások szemléltetésére a 2.12 ábrán egyenértékű hatásvázlatok láthatók, amelyek az a) hatásvázlaton lévő eredeti változat egyenértékű átalakításával, a 2.11 ábra átalakítási szabályainak alkalmazásával készültek. A 2.12 ábra b) hatásvázlata az 1., 2. és 3. sorszámú, a c) hatásvázlat pedig a 6. sorszámú átalakítási szabály figyelembevételével került felvázolásra az eredeti a) kapcsolást módosítva.
a)
b)
c)
d)
2.12 ábra: Példa hatásvázlat egyszerűsítésére
4 2 3 2
1
1
) 1
( Y Y Y Y
Y
Xb Xk
Xb
Y1
Xk
Y2Y4
Y2
Y3
Xb
Y1
Xk
Y2Y4
Y2
Y3
Xb
Y1
Xk
XkY4 Y4
Y2
Y3
3. VEZÉRLÉSTECHNIKAI FÜGGVÉNYEK ÉS ALKALMAZÁSUK
Az automatika, automatizálás egyik nagy részterülete a vezérléstechnika, ahol főleg digitális jelek irányítását kell megvalósítani. A digitális jelek logikai kapcsolatait és azok egyszerűsítését, realizálását ismerjük meg a következő fejezetben.
3.1. Halmazelméleti alapfogalmak
Halmazon valamilyen közös tulajdonsággal rendelkező dolgok összességét értjük. A halmazhoz tartozó „dolgok összességét” a halmaz elemeinek nevezik. Az adott tulajdonságokkal nem rendelkező dolgok összessége alkotja a komplemens vagy kiegészítő halmazt.
A halmazok lehetnek végesek vagy végtelenek a halmazt alkotó elemek számától függően. Két speciális halmazt is definiálnak: az üres halmazt, amelynek egyetlen eleme sincs, és a teljes vagy univerzális halmazt, amelyet valamely halmaz és ennek komplemense alkot.
A közös rész jelölésére az halmazelméletben a vagy jelet, illetve a Boole-algebrában a logikai szorzást és ennek jelét használják. A B = A B=A· B.
Az egyesített halmaz jelölésére az U vagy V szimbólumot, illetve a Boole-algebrában a logikai összeadást és ennek jelét használják: A U B = A V B = A + B
A halmazok és a rajtuk értelmezett műveletek jól szemléltethetők (a J. Venn és Weitch matematikusról elnevezett) diagramokkal is. A teljes halmazt egy négyzettel, míg a rész- halmazokat egy zárt alakzattal – célszerűen egy körrel (Venn-diagramban) – vagy egy téglalappal (Weitch-diagramban) jelölik.
Venn-diagram Részhalmazok metszete Részhalmazok egyesítése
3.1 ábra: Logikai függvények grafikus ábrázolása
Az ábra a metszésnek (ÉS művelet) azt a változatát szemlélteti, amelyik mindegyik változó valamelyik értékének közös területe. Ez metszi ki a legkisebb elemi területet, ezért nevezik ezt minterm-nek. A másik ábrán az összes változó valamely értékeihez tartozó együttes terület látható. Az egyesített terület a legnagyobb részterület, amelyet maxterm-nek neveznek. Mind a két kitüntetett területből 2n–en darab van, ahol n a változók száma.
3.2. Boole-logikai algebra
Azokat az áramköröket, amelyek ki- és bemenőjelei csak két állapotot vehetnek fel, kétállapotú vagy bináris áramköröknek nevezzük. Az egész rendszer azon az elven alapszik, hogy a logikai megállapítások lehetnek igazak vagy hamisak. Egy villamos kapcsoló lehet zárt vagy nyitott. Egy izzó világít vagy nem. A gondolat leírásához nem szükséges a szavak használata, elég, ha a szimbólumokat használjuk (1 = igaz, 0 = hamis).
3.1 táblázat: a BOOLE-algebra alaptételei
Alaptétel Duáltétel
1. tétel X = 1, ha X ≠ 0 X = 0, ha X ≠ 1
2. tétel 0*0 = 0 1+1 = 1
3. tétel 1*1 = 1 0+0 = 0
4. tétel 1*0 = 0 0+1 = 1
5. tétel 0 = 1 1 = 0
A „*” a közönséges algebrában a szorzást jelenti, itt azonban jelentése: logikai ÉS. A „+”
operátor nem összegzést, hanem a logikai VAGY kapcsolatot fejezi ki. Más megfogalmazásban a „+” a maximumképzés (max) jele, a „*” a minimumképzésé (min).
A B
C D
A B
C D
A B
C D
Metszet
A B DC
Egyesítés
A B C D
A
B
3.2 táblázat: A három logikai alapművelet bemutatása Logikai
alapművelet
Logikai kapcsolat
neve
Művelet
jele Algebrai alak Összeadás VAGY
(OR) + F = A + B +…+ N Szorzás ÉS
(VAGY) * F = A * B *…* N Tagadás NEM
(NOT)
fölül
– F = A
3.3 táblázat: A három logikai alapművelet igazságtáblázata
A B F=A+B F=A*B F=A
0 0 0 0
0 1 1 0 1
1 0 1 0 0
1 1 1 1
Az igazságtáblázat olyan táblázat, amely a független változók valamennyi lehetséges variációjához rögzíti a függő változó(k)nak az egyes értékvariációjához rendelt értékeit.
13.2 ábra: Vezérléseknél használatos jelölések +
A B F
+
A
B F F
A
+
3.3 ábra: Alapfüggvények létradiagramos megvalósítása
3.3. A logikai algebra szabályai, azonosságai
3.4 táblázat: A logikai algebra szabályai, azonosságai
1. A+0 =A A*0=0 Művelet 0-val
2. A+1=1 A*1=A Művelet 1-gyel
3. A+A=A A*A=A
4.
( A ) A ( A )
=A Negáció5.
A A 1
A*A0 Ponált és negáltváltozók
6.
A B B A A * B B * A
Kommutativitás7.
( A B ) C A ( B C ) ( A * B ) * C A * ( B * C )
Asszociativitás 8.A ( B * C ) ( A B ) * ( A C ) A * ( B C ) A * B A * C
Disztributivitás 9.A A * B A B A * ( A B ) A * B
10.
( A B ) * ( A C ) A ( B * C ) A * B A * C A * ( B C )
11.
A A * B A A * ( A B ) A
Abszorpció12. ABC A*B*C A*B*C AB C De Morgan
3.4. Egy- és kétváltozós logikai függvények
Az F alsó indexe a függvénykapcsolat sorszáma, a felső index a független változó számát mutatja.
3.5 táblázat: Egyváltozós logikai függvények
„A” független változó A 0 1
Függvény- kapcsolatok
Soha F = 0 1