Increased Cycle Time Achieved by Fractional Derivatives in the Adaptive Control of the
Brusselator Model
Kriszti´an K´osi (Phd student)
Doctoral School of Applied Informatics Obuda University´
Budapest, Hungary
Email: kosi.krisztian@phd.uni-obuda.hu
Adrienn Dineva (student) Don´at B´anki Faculty of Mechanical and Safety Engineering
Obuda University´ Budapest, Hungary Email: dineva.adrienn@gmail.com
J´ozsef K. Tar
Institute of Applied Mathematics Obuda University´ Budapest, Hungary
Email:
tar.jozsef@nik.uni-obuda.hu
Abstract—In the control of chemical reactions the goal is to stabilize the control and take care of the design that has to integrate engineering aspects, as restrictions concerning the control signals, and the phenomenological limits that are not necessarily expressed by the reaction kinetic equations (e.g. no negative concentrations can be physically interpreted, and the reactants at the side of ingress cannot be purely extracted from the stirring tank reactor). In this paper the Robust Fixed Point Transformation (RFPT)-based adaptive approach was chosen for the control of an approximately modeled Brusselator reaction.
The main reason of that was the fact that this methodology concentrates on the primary design goals as precise realization of the prescribed concentrations while the more conventional design methods that apply some Lyapunov function mainly concentrate on guaranteeing global stability without providing quasi-optimal solutions for the primary goals. Though the RFPT- based design has only local stability, its region of stability may be quite satisfactory for several practical applications. For controlling chemical reactions Continues Stirring Tank Reactors (CSTR) are widely used engines. The Busselator model will be represented in a CSTR in the simulations. In the present example two different reactants can be injected into the tank and the mixture is taken out in a single outlet. The necessary sampling frequency is a practically important design factor. It is shown that by the use of fractional order derivatives in the prescribed error relaxation considerably increases the necessary sampling time so it decreases the sampling frequency. This statement is substantiated by simulation results.
I. INTRODUCTION
Lyapunov’s direct method was introduced firstly in 1892 in his PhD Thesis [1] to determine the stability of special states of physical systems the equations of motion of which cannot be solved in closed analytical form therefore cannot discussed in the traditional manner. Its main virtue is that by the application of relatively simple considerations the fact of stability or instability can be determined without knowing any other details of the solution of the equations of motion.
In the sixties his method became very popular in the design of stable controllers (e.g. [2] [3], [4], [5], [6], [7], [8], [9], [10]). This design method is a very robust, it can be used for guaranteeing global stability of the controlled motion,
however, it does not reveal or guarantee other fine details of the motion of the controlled system. Such details can be revealed via simulations and can be manipulated by modifying the free parameters of the so created controllers that are not strictly and directly related to the primary design intents ad the fine structure of the error relaxation. This technique can be used for designing model-predictive controllers (if the designer is in the possession of a reliable and precise system model) as well for creating adaptive controllers when this model is imprecise and/or incomplete. In general it is unusual to have precise and complete models. Normally approximate models are available that are obtained by complicated identification techniques (e.g.
fuzzy model identification in [11]. In the practice the applica- tion of fuzzy controllers may work only with limited degree of freedom due to complexity problems [12]. In other cases the models can be intentionally simplified in order to reduce the complexity of TS fuzzy models by Higher Order Singular Value Decomposition (HOSVD) based technique (e.g. [13]).
An alternative method for achieving complexity reduction is the application of fuzzy rule interpolation techniques (e.g.
[14]). It can be stated that in general there is a need for the application of adaptive techniques that can utilize some initially available approximate system models.
In this paper for control method –as an alternative of Lyapunov’s methodology– the RFPT-based adaptive control was chosen [15], [16]. The reason is that it concentrates on the prescribed details of the error relaxation, and works with less number of free control parameters than Lyapunov’s technique does (e.g. [17], [18], [19]. The main drawback of this method, i.e. it has only a bounded region of convergence later was relaxed by simple auxiliary parameter tuning algorithms (e.g.
[20], [21]). It also became clear that leaving the region of convergence does not results in fatal consequences (appearance of some chattering) and the system can be lead back to the convergent regime while in the meantime this chattering can be reduced, too [23].
The Brusselator model is a very good representation of the autocatalytic chemical reactions in CSTR. The control
task will be represent with two inputs, where controlling the densities. The basics of the control of the Brusselator model was introduced in ([24], [25]). The new advantage is to improve the stability with fractional derivatives. The fractional derivatives was explained in Section II.
II. FRACTIONALDERIVATIVES
Though the idea of the fractional integrals and derivatives is as old sa that of the integer order ones (in 1695. L’Hospital asked Leibniz about the meaning of 𝐷𝑛𝑦 if 𝑛 = 12 [26]), in the development of natural sciences the integer order differentiation and integral calculus played the prime role till the first third of the 20th century (Gemant kb. 1930) when it was used for describing viscoelastic phenomena. (In the development of Classical Mechanics Galilei observed the fun- damental significance of the acceleration according to which the theory has been formalized in a variation principle using a Lagrangian that contained integer order derivatives of the state variable. Since Classical Mechanics served as a prototype for other physical theories this trend was deterministic for a long while. The mathematicians continuously worked on the development of this theory during the 19th century, too.) In connection with the description of physical systems of long term memory it became clear that the integer order description suffers from the need of very high order derivatives requiring a lot of data describing the initial condition. It was found that this difficulty can be elegantly evaded by fitting only a few parameters of a fractional order model [liquid-porous wall interaction, earthquake models, classical masses coupled by springs, etc. [26]]. Another problem with the use of the integer order derivatives consists in their sensitivity to measurement noises: the higher the order of derivation is the more sensitive the result is. The fractional order derivatives can be defined for functions that does not have integer order ones, furthermore their inherent memory make them promising tools for noise filtering applications.
In the here presented application the basic idea of using fractional order derivatives stemmed from the observation that due to the input coupling effect of adding reactants into a tank reactor required a 2nd order control for the Brusselator model [24] due to which the control system became noise- sensitive and required fast response, i.e. very short cycle time for the controller. It was theoretically expected that by the use of the noise filtering nature of the fractional order derivatives these advantageous properties could be used for increasing the necessary sampling time of the controller. Since this application was based on the use of an iterative adaptive controller in which machine learning happened via Robust Fixed Point Transformations that create the actual control value by observing the system’s response for the past signal this adaptive approach also has some memory. After switching on adaptivity normally a short, transient learning phase can be observed in which both monotone and fluctuating approaching of the fixed point (that is the solution of the control task) may happen Figs. 1, and 2. It can be expected that the memory of the fractional order derivative does not seriously
concern the learning abilities of the controller if it works in the monotone regime, however, in the fluctuating mode the memory of the fractional order derivatives can keep in the system of the transient fluctuation of iterative learning and may act in unfortunate manner. In the simulations published in this paper it was found that within certain limits the use of fractional derivatives had good and useful action. It worths noting the in our approach the finite Taylor series expansion of the z-transform of the fractional order derivatives was applied that corresponded to the use of input signals with different delay times that were integer multiples of the cycle time of the controller.
y
x 0
y=x
f(x)
Fig. 1. Schematic picture explaining a possible operation of the algorithm that iteratively approaches the fixed point: the case of a monotone sequence that helps noise reduction and may be combined with the long term memory properties of the fractional order derivatives
y
0 x
y=x
f(x)
Fig. 2. Schematic picture explaining a possible operation of the algorithm that iteratively approaches the fixed point: the case of a non-monotone sequence that fluctuates around the fixed point and may not be combined with the long term memory properties of the fractional order derivatives: the long memory may save or conserve the transient fluctuation of the RFPT-based iterative learning that may cease to be a transient effect
III. THERFPTMETHOD FOR THEBRUSSELATOR MODEL
The Fixed Point Transformation is an adaptive control originally was developed from simple geometrically similar triangles in 2007 [15]. The RFPT (its robust version) was introduced in 2008 [28].
The basic ide was the deformation of the input until the controller produces the requested output. It is computed from a rough model and from the observable output of the system.
Normally it generates a Cauchy sequence, which converges to the fixed point that is the solution of the adaptive control problem. The control of the Brussalator model with RFPT was introduced [25]. The input coupling phenomenon was explained in [24].
The basic equations of the RFPT (1, 2) taken from [15], where 𝐴𝑐,𝐵𝑐,𝐾𝑐 are the control parameters, 𝜎 is a standard sigmoid function, ℎ𝑛+1 is a response error, 𝑒𝑛+1 is a unit vector for the present control cycle, 𝑟𝑛 response for the previous cycle. The first RFPT equations generates a Cauchy sequence, which converges to the solution of the control task, if the mapping realized by (1, 2) is contractive. This method can be regarded as a special version of iterative learning control.
𝑟𝑛+1= (1 +𝐵𝑛+1)𝑟𝑛+𝐾𝑐+𝑒𝑛+1 (1) 𝐵𝑛+1=𝐵𝑐𝜎(𝐴𝑐∥ℎ𝑛+1∥ (2) The fractional derivatives are represented by the Taylor series of the Z transform as (1−𝑧−1)0.8 ≈ 1−0.8𝑧−1− 0.08𝑧−2−0.032𝑧−3−0.0176𝑧−4−0.011264𝑧−5+𝑂(𝑧−6), where𝑧−𝑛corresponds to the signal of𝑛step delay in a digital controller [27]. These delays are applied for the error signal according a following formula (3):
𝑆¨= ¨𝑆𝑁 + 3𝜆1.2[(𝑆𝑁 −𝑆𝑆)−45(𝑆𝑁(1)−𝑆𝑆(1))−
−252(𝑆𝑁(2)−𝑆𝑆(2))−1254 (𝑆𝑁(3)−𝑆𝑆(3))−
−62511(𝑆𝑁(4)−𝑆𝑆(4))−15625176
(𝑆𝑁(5)−𝑆𝑆(5))]/𝑑𝑡0.8+ 3(𝜆2)(𝑆𝑁 −𝑆𝑆) +𝜆3𝑒𝑟𝑟𝑖𝑛𝑡
(3) For the convergence of the RFPT-based iterative learning sequence only the limitation of the absolute value of the derivative of the response function is prescribed in the close vicinity of the fixed point. The derivative itself may be either positive or negative as in Figs. 1, and 2. However, these local properties depend on the global shape of the nonlinear functionapplied in the RFPT. Consequently, besides concerning the monotone or fluctuating approach of the fixed point the aftermaths of leaving the region of convergence may be significantly different, too. This subject area needs more detailed investigations in the future.
IV. SIMULATIONRESULTS
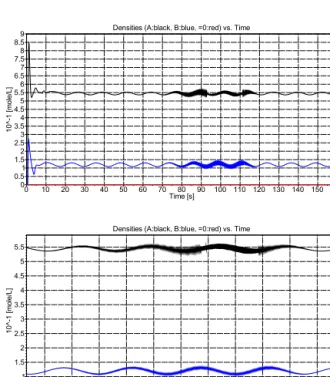
The control parameters for the simulation were: 𝐾 = 150,𝐵 = −1, 𝐴𝑠𝑡𝑒𝑝 = 0.5, 𝐴𝑐𝑒𝑛𝑡𝑟 = −2,954, 𝐴(𝑖)𝑚𝑖𝑛 = 𝑙𝑜𝑔10(𝐴𝑐𝑒𝑛𝑡𝑟)−𝑖𝑛𝑡(𝐴𝑠𝑡𝑒𝑝2 ),𝐴𝑐𝑡𝑟𝑙(𝑖+ 1,1) = 10(𝐴(𝑖)𝑚𝑖𝑛+ 𝐴𝑠𝑡𝑒𝑝∗𝑖), where 𝑖 : 𝑠𝑎𝑚𝑝𝑙𝑒𝑐𝑦𝑐𝑙𝑒 One of the goals was in the simulations was the reduction of the sampling time. Two cases were investigated, the difference between them was in the sampling time. In the first case the sampling time was 0.08s, in the second case it was 0.05s. The trajectoriesseem to be precise, in both cases approximately a same result was obtained Fig. 3. In the first case in the 2nd time derivatives for concentrationsfluctuation appeared and grew up to around 3×10−1𝐿⋅𝑠𝑚𝑜𝑙2 in the second half of the time-frame, but the controller eliminated it, the zoomed Figs shows that effect Fig. 4. In the second case there are two places, where the fluctuations grew up. The controller could control it, and reduced both of then (Fig. 5). The correlation buffer shows where can the controller adaptively handle the reactions. It is approximately same for both cases. If the value is 1 on the buffer, the controller can work adaptively.Densitiesshow
the concentrations of reagents A and B in the tank. In the first case, in the second half of the time-frame, where small fluctuations appear in correlation with the chattering in the control signals. (Fig. 6 and 10). In the second case are three places, where small fluctuations appear in correlation with the chattering in the control signals (Fig. 7 and 11). The voting weights weight the proposals generated by the different 𝐴𝑐
values for the next cycle (Fig. 8 - 9). The control signals show the way, how the controller try to handle the reactions.
In the first case, the zoomed figure shows the input coupling effects, where the cut below 0can be observed, too (Fig 10 - 11). In the figures of thenontransient tracking erroris cut off the big initial transients are hidden in order to reveal the fine structure of the graphs the errors (the great initial transients can be seen in the diagrams describing the trajectory tracking) (Fig 12 - 13).
Fig. 3. Trajectories (both cases approximately same) (in the first case the sampling time was 0.08s, in the second one it was 0.05s): the nominal (“A”
input concentrations: black lines, “B” input concentrations: blue lines) and the simulated (“A” input concentrations: green lines, “B” input concentrations: red lines)
V. CONCLUSION
In this paper possible increase of the necessary cycle-time of a digital adaptive controller by the use of fractional order derivatives in the feedback was investigated in the case of an approximately modeled Brusselator reaction in a CSTR.
Any possible increase in the cycle time means reduction in the frequency of the necessary measurements so this aim has practical significance. The effects of the estimation er- rors were compensated by an RFPT-based iterative adaptive controller the applies delayed feedback in machine learning.
The noise-reducing and smoothing property of the fractional order derivatives in this case is combined with the “memory”
of the iterative learning for which more fortunate (monotone convergence in the iteration) and less advantageous (non- monotone fluctuations in the iterative learning) combinations can be expected. According to the simulations it was found that by using a truncated Taylor series expansion of a widely applied z-transform of a fractional order (approximately 0.8) derivative resulted in significant increase in the allowable cycle time.
Fig. 4. 2ndtime derivatives of the concentrations in first case, where the sampling time was 0.08s. The first chart is the full picture, the second and third display zoomed excerpts, Desired (“A” input concentrations: black line,
“B” input concentrations: blue line), Realized (“A” input concentrations: green line, “B” input concentrations: red line), Requested (“A” input concentrations:
magenta line, “B” input concentrations: purple line)
ACKNOWLEDGMENT
The authors thankfully acknowledge the grant provided by the National Development Agency in the frame of the projects T ´AMOP-4.2.2/B-10/1-2010-0020 (Support of the scientific training, workshops, and establish talent management system at the ´Obuda University) and T ´AMOP-4.2.2.A-11/1/KONV- 2012-0012: Basic research for the development of hybrid and electric vehicles - The Project is supported by the Hungarian Government and co-financed by the European Social Fund.
REFERENCES
[1] A.M. Lyapunov: A general task about the stability of motion. (in Russian), PhD Thesis, 1892.
[2] A.M. Lyapunov: Stability of motion. Academic Press, New-York and London, 1966.
[3] R. Isermann, K.H. Lachmann, and D. Matko: Adaptive Control Systems, New York DC, Prentice-Hall, USA, 1992.
Fig. 5. 2ndtime derivatives of the concentrations in second case, where the sampling time was 0.05s. The first chart is the full picture, the second displays zoomed excerpts, Desired (“A” input concentrations: black line, “B” input concentrations: blue line), Realized (“A” input concentrations: green line, “B”
input concentrations: red line), Requested (“A” input concentrations: magenta line, “B” input concentrations: purple line)
Fig. 6. Densities of the concentrations for the first case, where the sampling time was 0.08s: (“A” input concentrations: black line, “B” input concentrations: blue line, “0”: red line)
[4] Jean-Jacques E. Slotine, W. Li: Applied Nonlinear Control, Prentice Hall
Fig. 7. Densities of the concentrations for the second case, where the sampling time was 0.05s: (“A” input concentrations: black line, “B” input concentrations: blue line, “0”: red line)
Fig. 8. Voting Weights, for the first case, where the sampling time was 0.08s:
(1: black, 2: blue, 3: green, 4: cyan, 5: red, 6: magenta lines)
Fig. 9. Voting Weights, for the second case, where the sampling time was 0.05s: (1: black, 2: blue, 3: green, 4: cyan, 5: red, 6: magenta lines)
International, Inc., Englewood Cliffs, New Jersey, 1991.
[5] R.M. Murray, Z. Li, S.S. Sastry: A mathematical introduction to robotic manipulation, CRC Press, New York, 1994.
[6] Charles C. Nguyen, Sami S. Antrazi, Zhen-Lei Zhou, Charles E. Campbell Jr.: Adaptive control of a stewart platform-based manipulator, Journal of Robotic Systems, Volume 10, Number 5, 1993, pp. 657–687, 1993.
[7] R. Kamnik, D. Matko and T. Bajd: Application of Model Reference Adaptive Control to Industrial Robot Impedance Control, Journal of Intelligent and Robotic Systems, vol. 22, pp. 153–163, 1998.
[8] J. Soml´o, B. Lantos, P.T. C´at: Advanced robot control, Akad´emiai Kiad´o, Budapest, 2002.
[9] K. Hosseini–Suny, H. Momeni, and F. Janabi-Sharifi: Model Reference Adaptive Control Design for a Teleoperation System with Output Pre- diction, J Intell Robot Syst, DOI 10.1007/s10846-010-9400-4, pp. 1–21, 2010.
Fig. 10. Control Signals for the first case, where the sampling time was 0.08s: (“A” input: black line, “B” input: blue, “0”: red line)
Fig. 11. Control Signals for the second case, where the sampling time was 0.05s: (“A” input: black line, “B” input: blue line, “0”: red line)
[10] C.J. Khoh and K.K. Tan: Adaptive robust control for servo manipulators, Neural Comput & Applic, vol. 12, pp. 178–184, 2005.
[11] J. Botzheim, C. Cabrita, L. T. K´oczy, A. E. Ruano: Fuzzy rule extraction by bacterial memetic algorithms, International Journal of Intelligent Systems, vol. 24, pp. 312 - 339, 2009.
[12] R.-E. Precup, S. Preitl, E. M. Petriu, J. K. Tar, M. L. Tomescu, C. Pozna:
Fig. 12. Nontransient Tracking Error for the first case, where the sampling time was 0.08s: (X: black line, Y: blue line, “0”: red line)
Fig. 13. Nontransient Tracking Error for the second case, where the sampling time was 0.05s: (X: black line, Y: blue line, “0”: red line)
Generic two-degree-of-freedom linear and fuzzy controllers for integral processes, Journal of the Franklin Institute, vol. 346, no.10., pp. 980 - 1003, 2009.
[13] P. Baranyi, A.R. Varkonyi-Koczy, Yeung Yam, R.J. Patton: Adaptation of TS fuzzy models without complexity expansion: HOSVD-based ap- proach, Instrumentation and Measurement, IEEE Transactions, vol. 54, pp. 52 - 60, 2005.
[14] Tikk, D., Cs. Johany´ak, Z., Kov´acs, S. and Wong, K.W.: Fuzzy rule interpolation and extrapolation techniques: Criteria and evaluation guide- lines. Journal of Advanced Computational Intelligence and Intelligent Informatics, vol. 15, no. 3., pp. 254 - 263, 2011.
[15] J.K. Tar, I.J. Rudas and K.R. Kozłowski, Fixed Point Transformations- Based Approach in Adaptive Control of Smooth Systems.Lecture Notes in Control and Information Sciences 360 (Eds.: M. Thoma and M.
Morari), Robot Motion and Control 2007 (Ed.: Krzysztof R. Kozłowski), Springer Verlag London Ltd., pp. 157–166, 2007.
[16] J.K. Tar, J.F. Bit´o, L. N´adai, J.A. Tenreiro Machado, Robust Fixed Point Transformations in Adaptive Control Using Local Basin of Attraction, Acta Polytechnica Hungarica, Vol. 6 Issue No. 1, pp. 21–37, 2009.
[17] J.K. Tar, Towards Replacing Lyapunov’s “Direct” Method in Adaptive
Control of Nonlinear Systems, (invited plenary lecture), Prorc. of the 3rd Conference in Mathematical Methods in Engineering, 21–24 October 2010, Coimbra, Portugal, Paper 11 (CD issue) 2010.
[18] J.K. Tar, J.F. Bit´o, I.J. Rudas: Replacement of Lyapunov’s Direct Method in Model Reference Adaptive Control with Robust Fixed Point Transformations, Proc. of the 14th IEEE International Conference on Intelligent Engineering Systems 2010, Las Palmas of Gran Canaria, Spain, May 5–7, pp. 231–235, 2010.
[19] J.K. Tar, I.J. Rudas, J.F. Bit´o, S. Preitl, R.-E. Precup, Convergence stabilization by parameter tuning in Robust Fixed Point Transforma- tion based adaptive control of underactuated MIMO systems, Proc. of the International Joint Conference on Computational Cybernetics and Technical Informatics (ICCC-CONTI 2010), 27–29 May 2010, Timis¸oara, Romania, pp. 407–412, 2010.
[20] J.K. Tar, L. N´adai, I.J. Rudas, T.A. V´arkonyi, RFPT-based Adaptive Control Stabilized by Fuzzy Parameter Tuning,Proc. of the 9th European Workshop on Advanced Control and Diagnosis, ACD 2011. Budapest, Hungary,pp. 1–8. Paper 6, 2011.
[21] T.A. V´arkonyi, J.K. Tar, I.J. Rudas, Fuzzy Parameter Tuning in the Stabilization of an RFPT-based Adaptive Control for an Underactuated System, Proc. of the 2011 IEEE 12th International Symposium on Computational Intelligence and Informatics (CINTI), 21-22 Nov. 2011, Budapest, pp. 591–596, 2011.
[22] T.A. V´arkonyi, J.K. Tar, I.J. Rudas, I. Kr´omer,VS-type Stabilization of MRAC Controllers Using Robust Fixed Point Transformations, Proc.
of the 7th IEEE International Symposium on Applied Computational Intelligence and Informatics, May 2426, 2012, Timis¸oara, Romania, pp.
389–394, 2012.
[23] K. K´osi, Sz. Hajdu, J.F. Bit´o, J.K. Tar:Chaos Formation and Reduction in Robust Fixed Point Transformations Based Adaptive Control, 4th IEEE International Conference on Nonlinear Science and Complexity (NSC 2012), August 6-11 2012, Budapest, Hungary, pp. 211-216.
[24] J. K.Tar, I. J. Rudas, L. Ndai, K. K´osi: Adaptive Controllability of the Brusselator Model with Input Coupling, 4th IEEE International Sympo- sium on Logistics and Industrial Informatics (LINDI 2012), September 5-7 2012, Smolenice, Slovakia, pp. 157-162.
[25] K. K´osi, J.F. Bit´o, J.K. Tar: On the Effects of Strong Asymmetries on the Adaptive Controllers Based on Robust Fixed Point Transformations, IEEE 10th Jubilee International Symposium on Intelligent Systems and Informatics (SISY 2012), September 20-22 2012, Subotica, Serbia, pp.
259-264.
[26] J. A. Tenreiro Machado: Fractional Calculus and Dynamical Systems, invited plenary lecture at the IEEE International Conference on Compu- tational Cybernetics (ICCC 2006), Tallinn, Estonia, August 20-22, 2006.
[27] J.A. Tenreiro Machado, Alexandra M. Galhano, Anabela M. Oliveira, Jzsef K. Tar: Optimal approximation of fractional derivatives through discrete-time fractions using genetic algorithms, Commun Nonlinear Sci Numer Simulat, 6 May 2009, pp. 482490.
[28] Tar, J.K., Bito, J.F., Rudas, I.J., Kozlowski, K.R. and Tenreiro Machado, J.A. (2008), Possible adaptive control by tangent hyperbolic fixed point transformations used for controlling theΦ6-type Van der Pol oscillator, Proc. of the 6th IEEE International Conference on Computational Cy- bernetics (ICCC 2008), November 27-29, 2008, Stara Lesna, Slovakia, 15-20.