XXI. SZÁZADI VÍZGAZDÁLKODÁS A TUDOMÁNYOK METSZÉSPONTJÁBAN
II . Víztudományi Nemzetközi Konferencia
Konferencia kötet
Szarvas, 2019. március 22.
5540 Szarvas, Szabadság út 1-3.
honlap: www.gk.szie.hu
Felelős kiadó:
Dr. Futó Zoltán
egyetemi docens, Szent István Egyetem Agrár- és Gazdaságtudományi Karának megbízott dékánja
Rácz Istvánné dr.
főiskolai tanár, szakmai vezető EFOP 3.6.1-16-2016-00016 projekt
Szerkesztette:
Dr. Jakab Gusztáv – Csengeri Erzsébet
A kiadvány megjelenését támogatta:
Az EFOP 3.6.1-16-2016-00016 számú, SZIE Szarvasi Campusának kutatási és képzési profiljának specializálása intelligens szakosodással: mezőgazdasági vízgazdálkodás, hidrokultúrás növénytermesztés, alternatív szántóföldi növénytermesztés, ehhez kapcsolódó precíziós gépkezelés fejlesztése című ESZA által finanszírozott EU projekt.
Nyomda:
Digitális Kalamáris Kiadó és Gyorsnyomda 5540 Szarvas, Fűzfa u. 27.
ISBN 978-963-269-809-0
Szarvas, 2019
Rácz Istvánné dr. főiskolai tanár, EFOP szakmai vezető, SZIE AGK Víz- és Környezetgazdálkodási Intézet
Prof. Dr. Helyes Lajos egyetemi tanár, intézetigazgató, SZIE MKK Kertészeti Intézet
Dr. Skutai Julianna egyetemi docens, SZIE MKK Természetvédelmi és Tájgazdálkodási Intézet
Dr. Jakab Gusztáv egyetemi docens, mb intézetigazgató, SZIE AGK Víz- és Környezetgazdálkodási Intézet
Dr. Jakabné Dr. Sándor Zsuzsanna tudományos főmunkatárs, NAIK Halászati Kutató Intézet
Dr. Gombos Béla főiskolai docens, SZIE AGK Víz- és Környezetgazdálkodási Intézet
Dr. Virág Sándor főiskolai tanár, SZIE AGK Víz- és Környezetgazdálkodási Intézet
Dr. Mészáros Miklós főiskolai docens, SZIE AGK Víz- és Környezetgazdálkodási Intézet
Dr. Tirczka Imre egyetemi docens - SZIE MKK Természetvédelmi és Tájgazdálkodási Intézet
Dr. Centeri Csaba egyetemi docens, intézetigazgató, SZIE MKK Természetvédelmi és Tájgazdálkodási Intézet
Dr. Bodnár Károly főiskolai tanár, SZIE AGK Agrártudományi és Vidékfejlesztési Intézet
Dr. Egri Zoltán főiskolai docens SZIE AGK Agrártudományi és Vidékfejlesztési Intézet
Dr. Grónás Viktor egyetemi docens, SZIE MKK Természetvédelmi és Tájgazdálkodási Intézet
4
Tartalomjegyzék
Bányai Gréta - Gulyás Nikolett - Lemmer Balázs – Jákói Zoltán - Hodúr Cecilia:
Ultrahangos előkezelés hatása az enzimkinetikára ... 10 Bártfai Z. - Bognár I.-Faust D.-Lágymányosi A. - Tóth L. - Blahunka Z.: Robotok a precíziós mezőgazdaságban ... 16 Bártfai Zoltán – Kátai László – Szabó István – Gárdonyi Péter - Mezőgazdasági ékszíjhajtások precíziós gépüzemeltetés szempontjából lényeges üzemi paraméterei ... 29 Jákói Zoltán – Berta Adrienn – Papp Viktória– Hodur Cecilia – Beszédes Sándor:
Mikrohullámú előkezelés alkalmazási lehetőségei a szennyvíz és iszapkezelési eljárásokban ... 34 Bognár István – Bártfai Zoltán – Szabó István - Blahunka Zoltán Szakaszvezérlés teljesítményoptimalizálása ... 40 Czellér Krisztina – Tuba Géza – Kovács Györgyi – Sinka Lúcia – Zsembeli József–
Percze Attila: A Miscanthus giganteus vízfelhasználási hatékonyságának vizsgálata liziméteres kísérletben ... 48 Csengeri Erzsébet – Takács Sándor - Csányi Dániel – Barna Sándor – Jakab Gusztáv:
Integrált vízgyűjtő modellezés: MIKE SHE ... 56 Fazekas Ákos Ferenc – Veréb Gábor– Kertész Szabolcs– Beszédes Sándor– Hodur Cecília– László Zsuzsanna: Valós termálvíz nagyhatékonyságú oxidációs eljárásokkal való kezelésének költségbecslése ... 61 Futó Zoltán - Kruppa József - Orosz Szilvia - Bencze Gábor - Ifj. Kruppa József:
Gabonaszilázs előállítás lehetőségei kis vízigényű tritikálé fajták alkalmazásával a klímaváltozás tükrében ... 68 Gombos Béla– Hudák Roland: Csabacsűd község belterületén folytatott nagy területi sűrűségű csapadékmérések tapasztalatai ... 76 Grónás Viktor - Molnár Dániel - Skutai Julianna - Mohari Barbara: Térinformatikai és tájmetriai eljárásokon alapuló módszertan kidolgozása az agrárterületekhez kötődő madárfajok elterjedésének értékelésére ... 83
5
Jákói Zoltán - Hodúr Cecilia - László Zsuzsanna - Szalay Dóra - Beszédes Sándor:
Mikorohullámmal intenzifikált Fenton-eljárás alkalmazása szennyvízkezelésre ... 84 Kajári Balázs – Bozán Csaba: A belvízelöntések tartósságának elemzési lehetőségei néhány integrált hidrológiai modell összehasonlítása alapján ... 91 Kardos Máté Krisztián: Víz keretirányelv szerinti fiziko-kémiai minősítés alacsony mintaszám esetén ... 98 Kerezsi György – Kajári Balázs – Túri Norbert – Körösparti János – Bozán Csaba:
Vízvisszatartás tervezése belvizes területen UAV légifelvételből készített digitális magassági modell alapján ... 111 Kertész Szabolcs – Garai Dzsenifer – Apáti-Nagy Petra – Seres Zita – Veréb Gábor – Beszédes Sándor – László Zsuzsanna – Szalay Dóra – Hodúr Cecilia: Biológiai- és kétlépcsős előkezelések vizsgálata membránszeparációnál ... 117 Kun Ágnes – Oncsik B. Mária – Szőke Anita – Bozán Csaba: Magas nátrium tartalmú öntözővíz hatása réti talajon kialakuló Al-oldható nátrium akkumuláció intenzitására ... 123 Lemmer Balázs - Jákói Zoltán – Stefán Márk – Deák József – Hodúr Cecilia: Cellulózfermentumok szeparációja membrántechnikával ... 128 Mészáros Miklós – Virág Sándor: A precíziós öntözés helyzete az európai mezőgazdaságban ... 134 Molnár András - Módos Rita – Vári Enikő – Kiss Andrea: Az öntözés jövedelmezőségének vizsgálata a főbb szántóföldi növényeknél ... 140 Molnár Petronella –Nagy László – Hegedűs Szilárd: Magyar és szlovák közfeladatot ellátó vállalatok számviteli elemzése ... 147 Nagypál Virág - Mikó Edit – Hodúr Cecília: Vízlábnyom: egy új szemlélet... 157 Ördög Dorottya - Jákói Zoltán – Lemmer Balázs - Hodúr Cecília: Cukoroldatok fermentálása ... 165 Rákóczi Attila – Urbán Klaudia: A Vidékfejlesztési Program öntözésfejlesztési pályázatai és azok Békés megyei jellemzése ... 171 Ribács Attila: Alga felhasználása a halak takarmányozásában ... 179
6
Zakar Mihály- Farkas Dániel Imre - Szabó Anna - Hanczné-Lakatos Erika - Keszthelyi- Szabó Gábor - László Zsuzsanna: A Fenton-reakció és az ózonos előkezelés hatásának vizsgálata modell tejipari szennyvíz membránszűrése során ... 186 Szalókiné Zima Ildikó: Víz- és tápanyagellátás hatása a kukorica aminosav tartalmára ... 193 Szerencsés Szabolcs Gyula - Veréb Gábor - Beszédes Sándor- Lászlói Zsuzsanna- Hodúr Cecilia - Csanádi József - Kertész Szabolcs: Vibrációs membránszűrés működtetési paramétereinek vizsgálata a szennyvíztisztításban ... 201 Szőke Anita – Bozán Csaba – Jancsó Mihály – Kolozsvári Ildikó – Bíróné Oncsik Mária – Kun Ágnes: Fenológiai megfigyelések mezőgazdasági eredetű szennyvízzel öntözött alternatív növényeken ... 207 Szpisják-Gulyás Nikolett - Lemmer Balázs – Czupy Imre – Hodúr Cecilia: Ultraszűrés modellezése ... 213 Tuba Géza – Kiss Judit - Garcia A. Rivera - Czellér Krisztina - Kovács Györgyi - Zsembeli József: A fák és a köztesnövény vízfelhasználási konkurenciájának vizsgálata egy agrárerdészeti rendszer első évében ... 219 Túri Norbert – Körösparti János – Kerezsi György – Kajári Balázs – Bozán Csaba:
Belvízkárokkal érintett területek kiterjedésének felmérése és terméskiesés becslése drónnal készült légifelvételek felhasználásával ... 225 Virág Sándor – Mészáros Miklós – Csengeri Erzsébet: A Szarvas – Békésszentandrási Holt-Körös öntözési célú hasznosítása ... 231 Minoarimanana Ny Ania - István Waltner: Drought and its effects in Madagascar Rakotoarivony ... 238 Szandra Baklanov - Ágota Horel - Zsófia Bakacsi Eszter Tóth - Györgyi Gelybó - Márton Dencső - Imre Potyó: Investigation of changes in nitrogen cycling processes under different land use types in a small catchment ... 249 Betim Bresilla - Adam Csorba - Marta Fuchs - Tamas Szegi: Charecteization of hydromorphological features of some kosovo Soils ... 250 Zita Birkás - Dzsenifer Német - Gábor Balázs - Katalin Fekete - Zoltán Kókai: Sensory quality and chemical composition of different types of sweet pepper (Capsicum annuun L.) hybrids ... 251
7
Bojana Dabić – Jasna Grabić – Emina Mladenović: Greywater in the service of
horticultural crops ... 258 Egri Zoltán – Tímea Győri: Roles of country effect and country group effect in regional health inequality process of Europe and CEE ... 264 Katalin Fekete – Zoltán Pap - Zita Csapó-Birkás – Nour Alhadidi: The effect of mycorrhizal inoculation on inner content and yield in case of tomato, cucumber and potato in soilless systems and on field: A review ... 273 Jasna Grabić - Bojana Ivošević - Simonida Djurić - Marko Panić - Slobodan Birgermajer - Vasa Radonić: Remote sensing method for assessment of phytoplankton in aquatic environment ... 281 János Grósz – István Waltner– András Sebők – Zoltán Vekerdy: Results of a long-term data analysis for algae migration monitoring ... 287 Hella Fodor – Ádám Csorba – Bendegúz Sas – Tamás Szegi – Erika Michéli:
Investigation of soils affected by inland excess water ... 288 Jafar Al-Omari - Gábor Soma Szerdahelyi - Júlia Radó - Sándor Szoboszlay - István Szabó: Identification of plastic-associated bacterial strains originated from fresh and seawater ... 289 Gusztáv Jakab: Water management in the Medieval hungary: legacy and opportunity... 290 Jovito L. Opeῆa: Growth and Drought Resistance of Swietenia macrophylla (King) as Affected by Arbuscular Mycorrhizal Fungi ... 291 Lamlile Khumalo – Márk Horváth – György Heltai: Sampling procedure for monitoring processes for the mobility of radioactive elements and potentially toxic elements during the recultivation of the uranium mining deposit No.1 in Mecsek ... 292 Lyndre Nel: Mapping River Conservation Priority Areas along the bergriver, South Africa ... 293 Mohammed Ahmed Mohammed Zein - Abdelmagid Ali Elmobarak: Mapping and Assessment of Sand Dunes by Remote Sensing and GIS in Sufia Project Area, White Nile State, Sudan ... 294 Dániel Molnár – Julianna Skutai – Viktor Grónás: The monitoring approach of Common Agricultural Policy and the Water Framework Directive ... 295
8
Maryam Mozafarian Meimandi - Noémi Kappel: Role of grafted vegetables
under water stress conditions ... 302 Németh Dzsenifer – Balázs Gábor – Kappel Noémi: Vitamin C and soluble solid content of different Melon varieties ... 306 Osama “Moh’d Najeeb” Gazal: Hydro-geological investigation of groundwater aquifers in arid region, Case study of Azraq basin ... 310 Tibor Terbe - I. Rácz – Boglárka Ágoston – Barbara Schmidt-Szantner: Development pathways of water management in Hungarian hydroponic tomato production ... 322 Norbert Révész – Flórián Tóth – László Berzi-Nagy – Ferenc Demény – András Rónyai – Dénes Gál – Éva Kerepeczki: Effects of sustainable fish feed on water quality in semi- intensive ponds ... 329 Sadiq Al Maliki: Data Integration for Modelling of Environmental Impact of Using Brackish Water for Wetlands Restoration. Case Study: Al Hammar Marshland, Southern Iraq ... 336 Saeidi Sahar - Walter István - Centeri Csaba: Application of hydrodynamic and Quality Modeling of water resources ... 338 Barbara Scmidtné Szantner – Péter Milotay – I. Rácz – Tibor Terbe: Impacts of irrigation and potassium supply on the yield and dry matter content of industrial tomato examined in two different years ... 343 András Sebők – Imre Czinkota – Boglárka Anna Dálnoki – István Waltner – János Grósz: Long-term reduction effects to the extractable soil chemicals ... 349 Taha Ibrahim: Analysis of Irrigation Efficiency Based on Remote Sensing. Test area:
New Halfa scheme, Sudan ... 356 Terbe Tibor – I. Rácz – Barbara Schmidt-Szantner: Analysing plant monitoring data in hydroponic tomato cultivation ... 357 Tóth József A.: Bulk Density assessment in relation with Soil Moisture Characteristic ... 365
9
Tsedekech G. Weldmichael – Lubangakene Denish – Tamás Szegi – Erika Michéli – Barbara Simon: Soil moisture content is governed by a combination of soil texture and soil organic matter in selected soils of Hungary ... 366
10
ULTRAHANGOS ELŐKEZELÉS HATÁSA AZ ENZIMKINETIKÁRA
BÁNYAI Gréta1*- GULYÁS Nikolett1- LEMMER Balázs2- JÁKÓI Zoltán1- HODÚR Cecilia1
1 Szegedi Tudományegyetem, Mérnöki Kar, Folyamatmérnöki Intézet, 6725 Szeged, Moszkvai krt. 9
2 Szegedi Tudományegyetem, Környezettudományi és Műszaki Intézet, 6726 Szeged, Közép fasor 52
Bevezetés
Energetikai szempontból hasznosíthatósági potenciállal bíró növényi eredetű biomassza az ipari tevékenység miatt bizonyos szinten és mennyiségben átalakul, gyakran hulladékként megjelenik, amit érdemes lehet felhasználni. A mezőgazdasági tevékenységek során keletkező, növényi eredetű szerves hulladékok további feldolgozási lehetőségeinek feltárása ezen oknál fogva nagy jelentőséggel bír.
A kísérlet során az ultrahang, mint fizikai előkezelési módszer hatását vizsgáltuk növényi melléktermékben cellulóztartalom enzimes lebonthatóságának fokozása céljából. A felhasznált kukorica-csutka őrlemény bioetanol gyártás szempontjából optimálisnak tekinthető, mivel az ára alacsony, Magyarországon nagy mennyiségben keletkező ipari melléktermék, valamint energetikai szempontból előnyös összetétellel bír.
Többféle szubsztrát koncentrációval dolgoztunk, amelyeket különböző amplitúdón és kezelési időtartamban ultrahangos kezelésnek vetettük alá. A cellulóz degradációját végző hidrolizáló enzim csak a szonikálást követően lett a rendszerekhez adva. Ezáltal azt vizsgáltuk, hogy milyen hatással van az ultrahang magára a cellulóz szálra, ez miként befolyásolja a cukorlebontási hányadot, a hidrolízis sebességét és az enzimkinetikai állandók, vagyis a KM és a vmax értékeket.
Irodalmi áttekintés
A szárazföldön és a természetes vizekben a még élő és elhalt szervezetek, és az általuk termelt szerves anyagok összessége a biomassza. Ehhez hozzáadódnak az emberi tevékenységek során iparban előállított biotechnológiai termékek és a biológiai eredetű vagy természetes úton lebomló kommunális és ipari hulladékok, ugyanakkor a megtermelt mennyiségnek 10-15%-át nem tudják felhasználni a különböző iparágakban (Bartholy, et al., 2013).
Az energetikai szempontból is jelentős potenciállal bíró lignocellulóz tartalmú biomassza lignocellulóz frakciója három fő komponensből áll, cellulózból, hemicellulózból és ligninből (Shawn, et al, 2009). A cellulóz a 4C1-konformációban lévő β - (1→4) – D - glükopiranóz egységek lineáris polimere (A. D. French, 2017). A cellulóztól eltérően a hemicellulóz véletlenszerű és amorf szerkezetű, amely több heteropolimert tartalmaz, beleértve a xilánt, galaktomannán, glükuronoxilán, arabinoxilán, glükomannán és xiloglukán. A lignin egy fenilpropanoid egység háromdimenziós polimerje. Úgy működik, mint egy celluláris ragasztó, amely szilárdságot és merevséget ad a sejtfal számára és a rovarok és kórokozók elleni rezisztenciában is nagy szerepet játszik (Furkan H., et al., 2015). A hosszú láncú
11
cellulóz polimerek (20-300) hidrogén és van der Waals kötésekkel vannak összekapcsolva, ez okozza a cellulóz mikrofibrillákba történő csomagolódását, amelyek összekötődésével, lignin és hemicellulóz segítségével létrejönnek a cellulózrostok (Bajpai, 2016).
Az enzimes reakciókra az jellemző, hogy az enzimek csak termodinamikailag lehetséges, szabadenergia csökkenéssel járó reakciókat katalizálnak. A reakciók egyensúlyi állapotát nem változtatják meg, csak az elérését siettetik. Az enzim a szubsztráttal egy intermedier komplexet képez, majd a komplexben lévő szubsztrát átalakul a reakció végtermékévé. Az enzim miközben regenerálódik, újabb reakció katalizálására alkalmas lesz. Nagy szubsztrátkoncentráció esetén az enzim teljes mennyisége az enzim-szubsztrát komplexben található, így a reakciósebesség maximális. Ilyenkor a rendszer 0-rendű kinetikával jellemezhető, mivel a sebesség nem függ a szubsztrát mennyiségétől. Kis szubsztrát koncentrációnál, a reakciósebesség egyenesen arányos a szubsztrát koncentrációjával, ebben az esetben a reakció az elsőrendű kinetikai törvényszerűséget követi (Keleti, 1985).
A biodegradációt megelőző ultrahangos kezelés hatásait vizsgáltuk az enzimkinetikai jellemzőkre. Fizikai tulajdonságai alapján az ultrahang megegyezik a hallható hangokkal. A rövid hullámhosszuk miatt viszont terjedésük, a közeghatáron létrejövő törésük és visszaverődésük a fényéhez hasonló. Megállapodás szerint az 1 W/cm2, vagyis a 10000 W/m2 teljesítmény alatt passzív, míg felette aktív ultrahangról beszélünk (Friedrich, 2008).
A nagy intenzitású ultrahangos vibrációk hatására fellépő átmeneti és ismétlődő átmeneti kavitáció során keletkezett buborékok heves összeomlása lép fel, amely helyi szinten hatalmas hőmérsékletet tud generálni (> 5000 K). Ez a magas hőmérséklet és az egyidejűleg fellépő nagy nyomásváltozások számos kémiai változást okozhatnak. A nagy intenzitású, aktív ultrahang legfőbb jellemzője, hogy a kezelt mintán szerkezetbeli változást okoz, és ezzel megváltoztatja valamely tulajdonságát (Kentish, et al., 2012).
Kezelés alatt a kis részecskék összegyűlnek csoportokba, a hosszú polimerek pedig felbomlanak, a keményítő megváltozhat, illetve a molekulák láncolata széteshet (Carlin, 1949). A poliszacharidok molekulatömeg-eloszlásának csökkenése a vízoldhatóságot és adott esetben gélesedési képességét szabja meg (Todaro, et al., 2016). A reakció és az oxidációs hatások gyorsaságának növekedése, egyes vegyi anyagok elválasztása, kristályosítás, forráspontbeli változások, néhány az ultrahang általános kémiai hatásai közül. Az ultrahangos kezelés különösen nagy hatással van a kémiai kötésekre, ilyenek többek között a kolloid rendszerek és az intermolekuláris kötések, mint például a van der Waals kötés (Carlin, 1949).
Anyag és módszer
A kísérletek során aprított kukorica-csutka, (Cobex® Feeds 12/30) ultrahanggal elősegített enzimes hidrolízisét végeztük,1,4-ß-xilanáz (Aspergillus oryzae, SIGMA) segítségével különböző kísérleti paraméterek mellett.
1%, 2%, 3%, 4% és 5%-os szubsztrát koncentrációval dolgoztunk, amelyeket ultrahanggal 60%, 80% és 100% amplitúdón, 5, 18 és 30 percig kezeltünk.
A kísérlet során először kimértük a megfelelő mennyiségű anyagot, majd 100 cm3 desztillált víz segítségével szuszpenziót hoztunk létre, majd elvégeztük a szonikálást a
12
korábban említett paraméterekkel. Az enzim csak ezt követően lett a szuszpenzióhoz adva, 6 cm3 térfogatban. Az enzimes hidrolízist 5 napig végeztük, ez idő alatt naponta kétszer mintavételeztünk. Ezt követően pH mérő segítségével beállítottuk a szuszpenzió pH-ját, 5,5-re. A reakció során vett mintákban keletkezett cukor mennyiségének változását DNSA reagens alkalmazásával, fotometriás vizsgálattal követtük nyomon. A kapott eredményekből számoltuk ki az enzimkinetikai állandókat.
Eredmények és értékelésük
Az 1. ábra mutatja be a szubsztrát-koncentráció változását a sebesség függvényében, 5 perces kezelési idő, 100% amplitúdós ultrahangos kezelés esetén. A 2. ábra ezen értékek reciprokát ábrázolja függvényalakban. Ez utóbbi ábra segítségével számítottuk ki a Michaelis-Menten állandó és a vmax értékekeit, ez a Lineweaver-Burk féle ábrázolás.
1.ábra. A reakció sebességének ábrázolása a szubsztrát koncentrációjának függvényében 100% amplitúdós előkezelés esetén
Figure 1. Rate of enzymatic reaction in the function of susbtrate concentration after 100% amplitude ultrasound pretreatmen
(1)hydrolysis rate (2)substrate concentration
A 1. ábrán megfigyelhető, hogy a reakció sebessége a szubsztrát koncentrációval egyenesen arányosan nő egy bizonyos pontig, majd ennél magasabb koncentrációnál a növekedés mértéke lelassul, míg el nem éri a vmax értéket. Itt beáll a biokémiai (és termodinamikai) egyensúly az enzim-szubsztrát-termék átalakulásban. Itt a reakciósebesség maximális, nem függ tovább a szubsztrát koncentrációtól, tehát további szubsztrát hozzáadásával már nem növelhető a reakció sebessége.
2. ábra Lineweaver-Burk féle ábrázolás a 100% amplitúdón kezelt minták esetében Figure 2. Lineweaver-Burk representation of the samples that were being sonicated with 100% amplitude
13
A Lineweaver-Burk féle ábrázolás segítségével számított enzimkinetikai paramétereket mutatja be az 1. táblázat, több különböző ultrahang-amplitúdó esetén.
1. táblázat Különböző amplitúdón kezelt minták vmax értéke és Michaelis-Menten állandója
60% 80% 100% Kontroll
vmax 77,519 37,594 36,630 26,316
KM 36 16,654 15,817 7,266
Table 1 .vmax and Michaelis-Menten constant of samples treated at different amplitudes
A vmax a kontroll minták esetén a legkisebb. Az ultrahangos kezelés során a 80-100%
amplitúdón vmax a kontrollhoz hasonló értéket mutat, a 60%-os amplitúdón kezelve értéke jelentősen megnő, a kontroll minták értékeinek több mint kétszerese. A KM
értéke az enzimreakcióra jellemző állandó, a kontroll minta KM értéke mutatja az enzim Michaelis-Menten állandóját szonikáció nélkül, normál körülmények között. Az eredmények azt mutatják, hogy a szubsztrát ultrahangos kezelése során olyan változások léptek fel, amelyek az enzimes hidrolízis során az enzimre is hatással voltak.
80 és 100% amplitúdón kezelve a KM érték közel azonos, a kontroll minta értékének megközelítően kétszerese. 60%-on az állandó sokszorosára nőtt, a többi ultrahangos eredmények több mint kétszerese, a kontroll minták majdnem ötszöröse.
A KM és vmax statisztikai eredményeit mutatja be a 3. ábra a kezelési idő és az amplitúdó függvényében.
3. ábra. KM ábrázolása a kezelési idő és az amplitúdó függvényében Figure 3. KM in the function of amplitude and treatment time
A 3. ábra a KM alakulását mutatja be a kezelési idő és az amplitúdó függvényében. A Michaelis-Menten állandó 100% amplitúdón, 30 perces kezelés esetén a legnagyobb. A minimumot 70 % amplitúdó körül, 5 perces előkezelésnél mutatja. Megállapítható, hogy az amplitúdó és a szonikálás idejének növelésével a KM lényegesen megnövekszik.
14
4. ábra. vmax ábrázolása a kezelési idő és az amplitúdó függvényében Figure 4. vmax in the function of amplitude and treatment time
A 4. ábra alapján hasonló megállapításokat lehet tenni, mint a KM ultrahangos kezelés hatására történő változásának értékelése során. Magas amplitúdó és magas kezelési idő mellett éri el a vmax a legnagyobb értéket. Legkisebb a vmax, ha a szubsztrátot 60-70%
amplitúdón, 5-10 percig ultrahangos előkezelésnek tesszük ki. Ebben az esetben is elmondható, hogy a kezelési idő és az amplitúdó növelésével nő a vmax értéke is.
Következtetések
A munkánk során kapott eredményekből megállapítható, hogy az ultrahanggal való előkezelés nagy hatással bír a KM és a vmax, az enzimkinetikát jellemző paraméterekre, valamint gyorsítja az enzimreakció lefolyását. A paraméterek szempontjából a magas amplitúdón való kezelés az optimális, mivel ezen körülmények között veszik fel a legnagyobb értékeket.
Összefoglalás
Az ultrahangos előkezelés hatását vizsgáltuk a cellulóz alapú szubsztrát hidrolízisének enzimkinetikai jellemzőire. Az ultrahang biológiai hatása már jól ismert, szerepe az orvostudományban hosszú múltra tekint vissza. Egyre több kutatás folyik azonban a kémia területén történő alkalmazásának kapcsán is. Az aktív, azaz nagy intenzitású ultrahang ugyanis képes az anyag tulajdonságait befolyásolni, ezáltal egyes reakciók gyorsaságát növelni.
Az eredményeink alapján megállapítható, hogy mind a Michaelis-Menten állandó, mind a vmax értéke akkor maximális, ha az amplitúdó és a kezelési idő is jelentős, vagyis 100% amplitúdó, 30 perc kezelési idő esetén. A minimum értéket ezzel ellentétben alacsony amplitúdón és alacsony kezelési idő mellett veszi fel, vagyis a statisztikai analízis és a kapott eredmények alapján kijelenthető, hogy minél magasabb amplitúdón, minél hosszabb ideig voltak kitéve a minták az ultrahang hatásának, annál hatékonyabb volt az enzimes reakció lefutása. A mérés pontosságát igazolja, hogy ezen két
15
enzimkinetikai paraméter - a KM és vmax - között megfigyelhető a klasszikus Michaelis- Menten-féle enzimkinetikai reakciók során jelentkező egyenes arányosság.
Kulcsszavak: biomassza,cellulóz, ultrahangos előkezelés, enzimes hidrolízis, enzimkinetikai állandók
Köszönetnyilvánítás
A kutatócsoport köszönetet mond a Nemzeti Kutatási, Fejlesztési és Innovációs Hivatal - NKFIH, K115691, és Az EFOP-3.6.2-16-2017-00010 azonosító számú „Fenntartható nyersanyag-gazdálkodás tematikus hálózat fejlesztése – RING 2017 által nyújtott anyagi támogatásért.
Irodalom
Bajpai, P. (2016): Structure of Lignocellulosic Biomass, Pretreatment of Lignocellulosic Biomass for Biofuel Production, 7. SpringerBriefs in Green Chemistry for Sustainability, (DOI 10.1007/978-981-10-0687- 6_2)
Bartholy J., Breuer H., Pieczka I., Pongrácz R., Radics K. (2013): Megújuló energiaforrások, Eötvös Loránd Tudományegyetem, 66-74.
Carlin, B. (1949): Ultrasonics, McGraw-Hill, New York, 201-215.
Furkan, H., Isikgor, C., Becer, R. (2015):Lignocellulosic Biomass: A Sustainable Platform for Production of Bio-Based Chemicals and Polymers, Royal Society of Chemistry, Issue 25, 2-3.
French, A. D., (2017): Glucose, not cellobiose, is the repeating unit of cellulose and fwhy that is important, Cellulose, 24(2017) 4605-4609.
Friedrich L. (2008): Ultrahang alkalmazása húskészítmények minősítésében és gyártástechnológiájában, Doktori értekezés, 4-7.
Keleti T. (1985): Enzimkinetika, Tankönyvkiadó, Budapest, 4-20.
Kentish, S., Ashokkumar, M., (2012): The Physical and Chemical Effects of Ultrasound, Ultrasound Technologies for Food and Bioprocessing pp 1-12, 7-10
Shawn, W., McLaren, J., Madl, R.,Wang, D., (2009): Biofuels from Lignocellulosic Biomass, Applications of Biotechnology for the Utilization of Renewable Energy Resources 2009,pp.: 20.
Todaro, S., Sabatino, M. A., Ajovalasit A., Ditta, L. A., Castiglia, D., Wach, R. A., Ulanski, P., Bulone, D., Dispenza, C., (2016): Radiation Engineering of Xyloglucan Hydrogels, Chemical Engineering, 289
Effects of ultrasound pretreatment on enzyme kinetics
Abstract
During my work, we researched the effects of the ultrasonic pre-treatment in different conditions on the enzymatic degradation of cellulose-containing biomass. During the experiment we used corn-feeds as a substrate, which is a cellulose containing product and which is a huge amount of industry byproduct. During the enzymatic hydrolysis, we worked with xylanase enzyme. The spectrophotometric method with dinitrosalicylic acid reagent was used to monitor the amount of sugar produced during the reaction. Our aim was to investigate the effect of different treatment time and amplitude sonication on the hydrolysis rate and Michaelis-Menten kinetics’ parameters.
Keywords: biomass, cellulose, ultrasonic pre-treatment, enzymatic hydrolysis, Michaelis-Menten kinetics’
parameters
16
Robotok a precíziós mezőgazdaságban
BÁRTFAI Zoltán 1- BOGNÁR István1 - FAUST Dezső1 - Lágymányosi Attila1 - TÓTH László1 - BLAHUNKA Zoltán1
1Szent István Egyetem Gépészmérnöki Kar bartfai.zoltan@gek.szie.hu Bevezetés
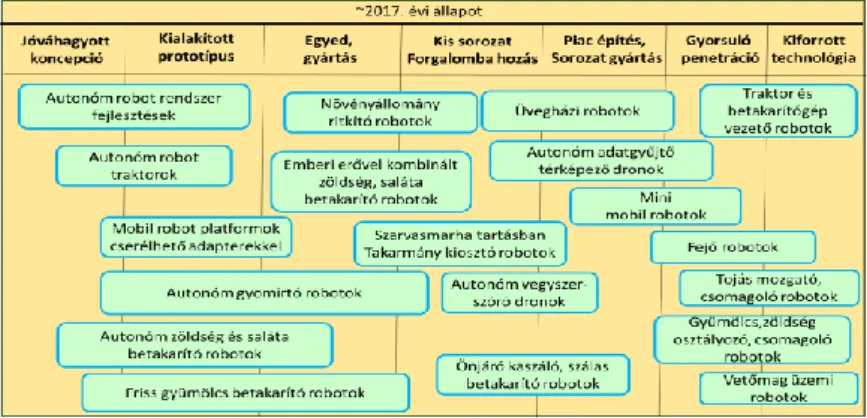
A mezőgazdaság automatizálására, robotizálására az elmúlt évtizedekben számos koncepcióterv született, és ezek nyomán több sikeres kísérleti megoldás is megjelent. A robotizáció szoros kölcsönhatásban van a mesterséges intelligenciával (AI), az információ és kommunikáció technológiával (IKT), valamint a szenzor technológiával (ST). A fejlődés eredményeként néhány általános célú technológia elérte azt a szintet, amelynek hatására kibontakozóban van a mezőgazdaságban is a negyedik technológiai forradalom. A kulcs technológiák közé a mesterséges intelligencia, az intelligens érzékelő rendszerek, az ágens technológia és az intelligens, integrál hálózati rendszerek sorolhatók. Mindezek a robotika újgenerációs fejlődését, és terjedését jelentős mértékben elősegítik. Az iparban lejátszódó folyamatok a mezőgazdaság robotizálását is kedvezően befolyásolják. Az élelmiszerek iránti mennyiségi igény növekedése, a munkaerő elöregedése, illetve a munkaerő csökkenése szintén olyan tényezők, amelyek a robotizálás szükségességét erősítik. Cikkünk áttekintő bemutatást ad a mezőgazdasági robotizáció jelenlegi helyzetéről.
Robot definíció, robot ágens jellemzők
A mesterséges intelligencia kutatás eredményeinek, a robotizációnak a mezőgazdasági technológiákban való alkalmazási lehetőségeit összefoglaló jelleggel alább ismertetjük.
1. ábra. Átfogó kép a mezőgazdaság robotizálásának jelenlegi helyzetéről Figure 1. Overview of the robotisation in agriculture
Általánosan robot ágensnek tekinthetünk minden olyan működő entitást, amely a dinamikusan változó környezet jellemzőit érzékeli, értelmezi, és működését ehhez is igazítva, avatkozik be a környezetébe. Tehát a robot ágens általános alapjellemzői: az érzékelés, a valamilyen szintű intelligens autonóm, és adaptív viselkedés és működés, valamint a környezetbe beavatkozó cselekvés vagy akció. További fontos ágens
17
tulajdonság a kommunikáció és a kooperáció képesség. A precíziós technológiákban egyre több ágens alapú robot egység, illetve robotrendszer kerül alkalmazásba. Ezek használatára a dinamikusan változó környezetben adódó komplex feladatok megoldásában érzékelhető egyre nagyobb igény. Ilyen összetett feladatok jelentkeznek többek között a szabadföldi termelésben is.
2. ábra. A robotok osztályozásának egy lehetséges módja Figure 2. Grouping of robots
A mezőgazdaság robotizálásának fontosabb sajátosságai
A mezőgazdaság robotizálásában nem csak a dinamikusan változó környezet támaszt komoly nehézséget, hanem az is, hogy a robotoknak sok esetben élő, vagy élő eredetű, sérülékeny anyagokat kell kezelni. Erre példa a robotok által végzett termés leválasztás, amelyre a 3. ábrán látható néhány megoldás.
3. ábra. Termés betakarítás robotokkal Figure 3. Harvest by robots
Az „a” és „c” ábra részleten mechanikus megfogó szerkezet megoldások láthatók. A „c”
jelű változatnál a megfogó szerkezet tájolását, pozícionálását sztereo kamerás mesterséges látó rendszer segíti. Itt jegyezzük meg, hogy a mesterséges látás több mezőgazdasági feladat robotizálásában játszik meghatározó szerepet. A „b” jelű ábra részlet egy vákuumos gyümölcs leválasztó kísérleti kialakítását szemlélteti.
Abból a tényből adódóan, hogy egy robot ágens csak a saját környezetében tudja ellátni a funkcióját, a mezőgazdaság egyes területeinek robotizálása nagyon komoly kihívásokat jelent. A környezet érzékelésének többek között pontossági és hatóköri korlátai vannak. Így pl. egy robottraktornak két nagyon eltérő környezetben
18
(mezőgazdasági terület, és közút) is robotként kellene működni. Míg a terepi tevékenység robotizálása előrehaladott, az erőgépek munkahelyre vonulásának teljes robotizálása még jó ideig várat magára. A csoportban dolgozó gépek esetén, az úgynevezett „mester – szolga” kommunikációs struktúra elfogadhatóan jó megoldásnak mutatkozik. A mester vagy vezérgépen megmarad az emberi felügyelet és irányítás, ami a vezeték nélküli kommunikációval igény szerint a „szolga” gépekre is kiterjeszthető.
A robotokba beágyazott egyre fejlettebb mesterséges intelligencia a gépi tanulás lehetőségét is biztosítja. A mezőgazdaság robotizálásának legtöbb területén a gépi tanulás képessége elősegítheti, hogy a komplex feladatokat javuló hatékonysággal lehessen megvalósítani. Egy célorientált, gépi tanulásra is képes robot ágens funkcionális struktúra vázlatát az 4. ábra mutatja.
4. ábra. Egy célorientált, gépi tanulásra is képes robot ágens funkcionális struktúra vázlata Figure 4. Structure of an agent. The agent is able to machine learning
Erőgépek automatikus kormányzása
Az elmúlt években robbanásszerű változás volt tapasztalható a traktorok, önjáró gépek automatikus kormányrendszerrel való felszerelésében. Az önvezető rendszer intelligens egysége a bejárt pálya pontos adatait is rögzíti, ami a soron következő munkák precízebb elvégzéshez is hozzájárulhat. Egy kormány robotika rendszer általános felépítését a 5. ábra mutatja.
5. ábra. Az erőgépek kormány robotika rendszerének általános felépítésének vázlata Figure 5. Power machine with robotised steering
19
Az RTK (Real Time Kinematic, Valós Idejű Kinematikus pozícionálás), az IMU (Inertial Measurement Unit Inerciális Mérőrendszer), a szögállás érzékelő jeleinek érzékelése és intelligens értékelése valós idejű adaptív működést, azaz kellő pontosságú pozicionálást és navigálást biztosít. A rendszerrel a tábla végi fordulás szabálya is megtanítható, ami a vezetőt a fordulók során is tehermentesíti, egyben elősegíti a precízebb munkavégzést. Például a csatlakozósorok pontos kialakítása biztosítottá válik.
Változó mennyiségi igény valós idejű érzékelése szerinti anyag kijuttatás
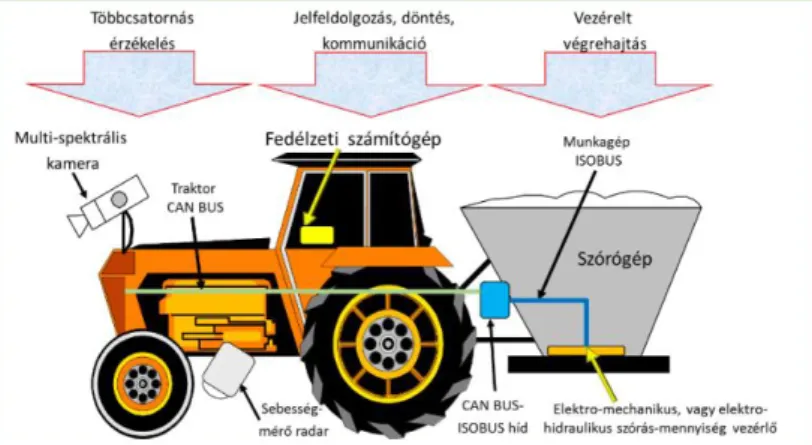
A nagy területen termesztett gabonaféléknél fontos feladatként jelentkezhet a precíz tápanyagutánpótlás. A növényzet levélzetének spektrális tulajdonságai összefüggésben vannak a nyomelem ellátottsággal. Ez alapul szolgálhat egy táblán belüli változó pótlási igény valósidejű érzékelésére, és az adott területre szükséges műtrágya mennyiség kijuttatás vezérlésére. Az erre a feladatra kialakított beágyazott robot ágens rendszerek kamerája vagy kamerái és a sebességmérő radar folyamatosan érzékelik a dinamikusan változó környezetet. A rendszer intelligenciája elvégzi a képfeldolgozást és a munkasebesség meghatározását. Ezek alapján kiszámításra kerül, hogy az adott területre mekkora mennyiséget kell kijuttatni, és ehhez az anyag kijuttató rendszeren, milyen aktuális állítást kell végrehajtani. A jeláramlás a CANBUS és ISOBUS integrált eszközhálózatán keresztül valósul meg (6. ábra).
6. ábra. Változó mennyiségi igény valósidejű érzékelése szerinti anyag kijuttatás Figure 6. Real time variable rate controller
Mobil mini robotok és drónok alkalmazása a terepi felmérésekben és monitorozásban
A szabadföldi termelésre általában a nagy térbeli kiterjedés a jellemző. A befolyásoló tényezők sokasága miatt a területek egyes részei agrotechnikai szempontból, statikusan és dinamikusan, azaz az időtől is függően, igen eltérő képet mutathatnak. A gazdálkodás hatékonysága, a termelés biztonsága, a környezet védelme szempontjából egyaránt fontos, hogy a termelő területekről, a tervezéshez és az időbeni célszerű beavatkozáshoz, kellő részletességű és pontosságú adatok álljanak rendelkezésre. A
20
drónok és a mobil mini robotok mezőgazdasági alkalmazásának lehetőségeit a 7. ábra mutatja.
7. ábra. A drónok és a mobil mini robotok alkalmazásának osztályozása Figure 7. Drons and mobil robots applications
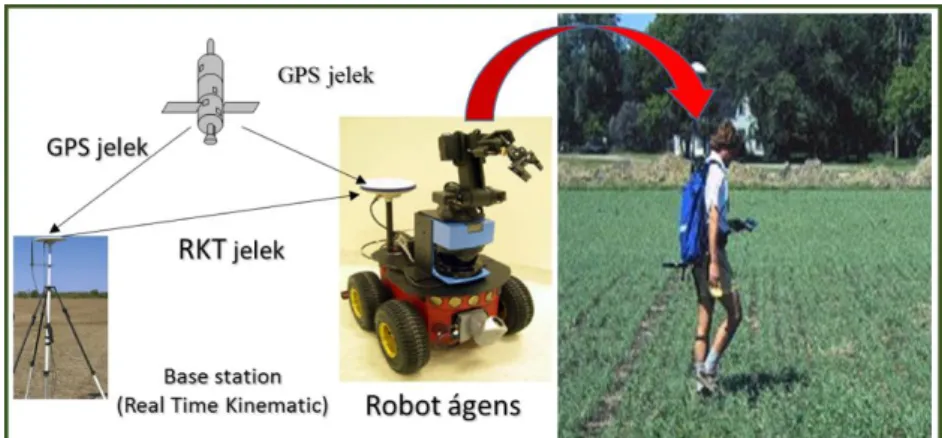
A mezőgazdasági alkalmazásra kifejlesztett és gyártott mobil mikro robotok a levél, illetve lombkorona alatti területen is tudnak felmérő, monitorozó munkát végezni. A kétféle robottechnikai megoldás funkciói és lehetőségei jól kiegészíthetik egymást (8.
ábra). A növény állomány drón által végzett felvételezés, és egy mini robot által, a lombozat alatti monitorozás, mintavételezés adatainak integrációjával a szakemberek nagyon hasznos tudáshoz és döntési információkhoz juthatnak.
8. ábra. A mezőgazdaságban alkalmazott drón (a) és a mobil mini robot (b) Figure 8. Agriculrues applications. a) dron, b) mobile robot
A mobil robot ágensek funkcionalitása nagymértékben függ attól, hogy az érzékelés rendszerük mennyire hatékonyan szolgálja az alapfeladatokat, illetve mennyire adekvát a dinamikusan változó környezeti folyamatok lekövetésére. A követelmények kielégítése többnyire csak többféle érzékelési funkció integrált együttműködése révén
21
valósít ható meg. A 9. ábra példaként a mezőgazdaságban is alkalmazott mobil mini robotok érzékelő rendszerének egy általános struktúra vázlatát mutatja be.
9. ábra. Mezőgazdaságban alkalmazott mobil mini robotok érzékelő rendszerének általános struktúra vázlata
Figure 9. Sensor system on a mobile robot
A mobil robotok monitorozó, ezen belül is a színes mono - vagy sztereó látóképességét, a növénytermelésben jól ki lehet használni. A sorvetésű növényeknél a színkövető (color tracking) képesség lehetővé teszi a soron történő végighaladást, miközben képrögzítés történik. A közvetített kép feldolgozása lehetőséget ad a csírázás, a vetés minőség egzakt megítélésére, és a tőeloszlás értékelésére. Ugyancsak a robotok látóképessége adhat lehetőséget a gyomok felmérésére, térképezésére. (10. ábra).
10. ábra. A mobil mini robotok segíthetik a gyomfertőzöttség felmérését Figure 10. Mobile robot on green product monitoring
22
Koncepciós és kísérleti megoldások a szabadföldi termelés robotizálásában
A szántóföldi munkák robotizálásának egyik vonulata a traktorgyártás bázisán bontakozik ki. Ezt példázza a közelmúltban bemutatott Case IH ACV (Autonomous Concept Vehicle) robot traktor. A gép nem rendelkezik vezetőfülkével, a munka közbeni felügyeletet az ember vezeték nélküli hálózaton keresztül látja el. Az erőgép és a munkagép összekapcsolása ugyancsak távirányítás segítségével valósul meg.
A mezőgazdasági robotizálás fejlesztésében markáns vonulat a robot platformok kialakítása. Fejlesztő, gyártó szereplőként itt már nem elsősorban a klasszikus mezőgépgyárak jelennek meg, hanem az elektronikában, méréstechnikában, irányítástechnikában tapasztalattal rendelkező cégek is. Erre példa a Bosch cég által kialakított, mesterséges látórendszerrel ellátott, gyomirtó robot platform (11. ábra).
11. ábra. A Bosch cég által kialakított gyomirtó robot platform
(https://spectrum.ieee.org/automaton/robotics/industrial-robots/bosch-deepfield-robotics-weed-control) Figure 11. Bosch designed mobile robot platform
Ma már az ipar és a szolgáltatás területén sikerrel alkalmaznak azonos, vagy eltérő funkciójú együttműködő robotokat, úgynevezett robot rajokat. Perspektivikusan a robot rajok alkalmazásnak a mezőgazdaságban is fontos szerepük lehet. A fejlesztések és a kísérletek ezen a területen is folynak. Az ausztráliai SwarmFarm cég sikerrel mutatta be munkában a platform alapú szántóföldi permetező egységekből álló robot raját (12.
ábra).
12. ábra. Az ausztráliai SwarmFarm cég platform alapú szántóföldi permetező egységekből álló robot raja munkában. (https://www.swarmfarm.com/ )
Figure 12. SwarmFarm platform for robot spraying
23 Az állattartás robotizációja
Az állattartás robotizálása rendkívül szerteágazó feladatotokat, és sokféle területet foglal magába. Ennek áttekintésében rendezőelv lehet a munkatárgy, amelyen a robotizált folyamattal célszerű változást hozunk létre.
A robotizált folyamatban az állat a munkatárgy:
állat és állapot detektálás (felismerés)
állapot alapú szelektálás,
fejés,
kezelés, ápolás.
A robotizált folyamatban az anyagok képezik a munka tárgyát:
takarmányozás,
termék kezelés,
melléktermék (pl. trágya) kezelés)
A fentieken túl az automatizált, robotizált folyamatok kiterjednek az alábbiakra:
Mesterséges intelligencia alapú állattartó-telepi létesítmény üzemeltetése,
Mesterséges intelligencia alapú termelési, tenyésztési, egészségügyi, gazdálkodási integrált adatkezelés (Big Data, Big Data analízis).
Az automatizálás, robotvalkalmazás feltétele az állattartásban
Az állatok egyedeinek, esetleg csoportjainak felismerése adja az alapvető technológiai lehetőséget. Az azonosításhoz az RFID rendszer terjedt el (14. ábra).
13. ábra A transponderek főbb kiviteli formái
A- hagyományos nyakszíjra szerelt -, B- fülkrotáliába szerelt (kisméretű) -, C- injektálható kivitelek, eltérő méretekben
Figure 13. Transponders
Állatok egyedi etetése
A takarmányelőkészítési technológiai folyamatok automatizálása ma már széles körben elterjedt. A kívánalmaknak megfelelően előkészített anyagok egyedi etetésénél az állatokon elhelyezett (pl. nyakszíjon) RFID egység kapcsolatba kerül a jászol, illetve etetőcsésze peremén lévő adó-vevővel. A vevőegységben felfogott jelek az erősítőn keresztül a vezérlőegységbe kerülnek, amely válaszkén a PC-vel együttműködve hozzárendeli a megfelelő takarmányadagot, és utasítja az adagolóberendezést a megfelelő mennyiség kiadagolására. Egy-egy adagoló több állat kiszolgálására is alkalmas. Az utóbbi időben megjelentek a tömegtakarmány kiadagoló automaták
24
(robotok) is, amelyek a tárolókból önállóan töltik meg tartályaikat és a meghatározott istálló meghatározott helyén adagolják a jászolba (14. ábra).
14 a. ábra Az etetőtartály megtöltése 14 b. ábra Takarmány kiosztás Figure 14. Feeding robots
Ivarzás jelzése (állapot ellenőrzés)
Adott gazdaság rentábilis működése érdekében lényeges a két ellés közötti időszak rövidítése, amely csak megfelelő ivarzásfelismeréssel lehetséges. Nagyobb tehenészetekben az állapot ellenőrzést manuálisan lehetetlen elvégezni, de a megfelelő nyilvántartás (adatbázis) és a technika lehetőséget szolgáltat. Az egész napos, folyamatos aktivitás (viselkedés) mérésével jelezhető az ivarzás ideje, de a betegségekre is ismertek a jellemző viselkedési „formák”. A rendszer alapvetően az állat mozgásának megfigyelésére, a lépések időegység alatti számolására épül. Az állatok aktivitásának megfigyelését, a lépésszámlálást a hagyományos nagyméretű nyakszíjon, vagy az állatok lábán lévő transponderek mellett elhelyezett érzékelők (pedométerek), jelfogók biztosítják (15 ábra).
15. ábra Az ivarzás in situ jelzése
A - helyi leolvasás –fejőház, B – távolsági leolvasás, helymeghatározás (legelőn) Figure 15. In situ sensors
25 A fejés automatizálása
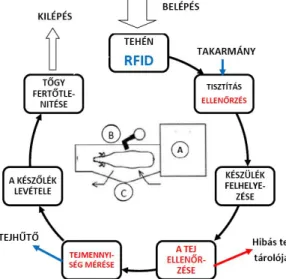
A fejőkészüléket is felhelyező robotegységek létrehozása jelentette a tejelő tehenészetek teljes automatizálásának (robotizálásának) lehetőségét. Egy-egy un. kompakt fejőrobot egység a jelenlegi fejlettségi szinten 40-70 tehenet is ellát. Ezek a számok alapvetően a tehénállomány teljesítményétől, a szelektáltságtól, egészségi állapotától (lábak, tőgyek), és a robot napi munkaidejétől is függenek. A robotoknál a 100 %-os műveleti megbízhatóság úgy érhető el, hogy minden művelet minőségi, és mennyiségi szempontból is, egy vagy két lépésben érzékelőkkel ellenőrzésre kerül. A fejőrobot az összes, a fejéssel kapcsolatos műveletet elvégzi (16. ábra). A műveletsor a tehén belépésével és RF azonosításával kezdődik meg. Az azonosítás egyes megoldásoknál már a válogató kapunál megtörténik, amikor is a nem fejhető egyed belépését a kapurendszer megtagadja.
16. ábra A fejés jellemző mozzanatai az egy állásos kompakt fejőrobotban Figure 16. Milking robot main steps
A fejőkészülékek biztonságos, sérülésmentes felhelyezése az automatizálás kulcskérdése. A fejőkelyhet mozgató robotkarnak az RFID rendszerrel azonosított állategyedhez kell igazodnia. A működtető szerkezet a felhelyező kart olyan helyzetbe hozza, amellyel a fejőkehely (készülék) megközelíti a tőgyet. A mozgáskoordinátákat, a pozicionálást tanulási folyamatban ismeri meg a robot úgy, hogy első alkalommal a fejést előkészítő személy kézzel vezetve helyezi fel a fejőkelyheket. Ezt a robot elektronikája megjegyzi, és 5-6 nap után már hibamentesen önállóan elvégzi a műveletet. Innen a fejőkelyhek felhelyezésének vezérlése már a szenzorok érzékelése segítségével folytatódik.
A bimbók érzékelésének leggyakoribb módja a robotkar végén lévő lézerdiódából kibocsátott pásztázó lézersugár, amely a bimbók felületéről visszaverődik. Ezt a jelfogók érzékelik. A jel kibocsátása, valamint a visszaverődése között mért időtartam (t) határozza meg a kar, és a bimbók távolságát (Z koordináta). A CCD kamera
26
képpontjai a függőleges, valamint a vízszintes elhelyezkedésüket (X-Y koordináták) adják, és ezzel in-situ, pontosan ismerté válik a bimbók vége. A pásztázó lézersugár megadja (számítja) a bimbók távolságát (z - koordináta), együttműködve a CCD (Charge-coupled Device) kamerával, amely az x és y koordinátákat adja meg (17.
ábra). Az így kapott értékeket hasonlítja össze a korábbi napok tanulása során regisztrált értékekkel. Ha az egyezés megfelelő, megkezdi a készülék felrakását. Ezt az állapotot a vezérlő követi egészen a felrakási pontig. Ha közben változás van - a bimbó helyzete megváltozik, mert az állat elmozdult – a folyamat megszakad, és a felrakást újból kezdődik a kiindulási pontról.
17. ábra A pásztázó lézersugárral és CCD kamerával
végzett helyzet meghatározás 18. ábra A bimbó pozicionálása lézersugárral Figure 17. Laser scanner CCD
Figure 18. Positioning
Ha mind a négy tőgybimbó egészséges, a robotkar megkezdi a fejőkelyhek felrakását. A robot a fejési műveleteket optimálisan betartja, vagyis a mosás, egyben stimulálás, és az első tejsugarakat fejését követően 1,0 perc múlva a fejés (optimális időben) megkezdődik. A berendezés tőgynegyedenként méri a tejmennyiséget és a fejés sebességét, de ezen túlmenően mintát is vesz a tejből, amelyet azonnal elemez is. Más megoldásoknál a robotkar a négy fejőkelyhet egyszerre pozícionálja a tőgy közelébe, majd egymást követően helyezi fel a tőgybimbókra (19. ábra).
19. ábra A fejőkelyhek felhelyezésének pozicionálása
LS – a pásztázó lézersugár adó-vevő egysége, R - Radar rendszerű (Radio Detection and Ranging) fejőkehely pozicionáló rendszer, S – lézersugár megjelenési képe a bimbókon
Figure 19. Positioning
27 Üzemi tapasztalatok
A robotizált, jól működő rendszerekben a fejések száma az állományra vetítve átlagosan 2,6-3,0 fejés/nap. Az egyik gazdaság tapasztalatai szerint a robotizálást megelőző napi 2,1 fejés/tehén értékről a robotizált rendszerben napi 3,3-re emelkedett a fejések száma, és ezzel 9-10%-al emelkedett az egyedi tejtermelés. A rendszertől függően a robot 3-4 fejést engedélyez. Nyilván a nagyobb teljesítményű teheneknél nagyobb a fenti szám.
Természetesen két fejés között megfelelő időtartamnak kell eltelnie.
A robot teljesítménye szempontjából leginkább meghatározó a tehenek fejési ideje.
Rövidebb fejési időt produkáló állomány esetén az adott robot több tehenet kezelhet. A nagyobb tejhozamú állományoknál általános lett a napi 2,6-2,7 fejés, ami csökkenti a kezelhető állomány méretét. Van egy lényeges harmadik szempont: a pihenésre fenntartott idő. Ha 21-22 órán át működik a robot, akkor az istállóban csupán 2-3 órán át van teljes nyugalom. Sokak véleménye szerint 5-6 óra indokolt lenne, ami a termelésre is előnyösen hat.
20. ábra A különböző funkciókat ellátó robotkarok a karusszel fejőállásban (DeLaval)
21. ábra Robotizált fejőkarusszel (DeLaval)
Figure 20. Robot arms Figure 21. Robot caressil
Összefoglalás
Cikkünkben áttekintettük a mezőgazdaság robotizációjának rendszertechnikai koncepcióját, az érezhetően intenzív fejlődés alatt álló terület fontosabb sajátosságait. A mesterséges intelligencia, és ezen keresztül a gépi tanulás az alkalmazható megoldások kialakításánál elkerülhetetlen követelmény a mezőgazdaságra jellemző dinamikusan változó termelési-, illetve robot környezet okán. Áttekintettük az eddig kialakult robot koncepciókat, és jellemző alkalmazási területüket. A Gépészmérnöki Karon kiterjedt laboratóriumi és szántóföldi kísérleteket folytatunk ágens alapon együttműködni képes mobil robotok terepi mérésekre való alkalmazhatóságával kapcsolatosan. Rendszerező áttekintésünkkel érzékeltetni kívánjuk a mezőgazdasági robotizáció felsőoktatási kutatásban, a jövő mérnökeinek képzésében betöltött, kiemelt jelentőségét.
Summary
Significant investment can be realised on the field of robotics, autonomous systems in the agriculture. According to the growing needs for good quality food, the productivity should be increased year by year, and research and innovation needs to ensure these
28
technologies reach their full potential. The application of artificial intelligence, machine learning can help to develop and spread adequate robots for the rapidly changing agricultural environment. Our article outlines the features and functions of the special robots for different segments of the agricultural production. We give a short view of our experimental research, performed on this field at the Faculty of Mechanical Engineering, Szent István University.
Key words: artificial intelligence, agent technology, mobile robots, robotics in the agriculture Köszönetnyilvánítás
A publikáció az EFOP-3.6.1-16-2016-00016 azonosítószámú, SZIE Szarvasi Campusának kutatási és képzési profiljának specializálása intelligens szakosodással:
mezőgazdasági vízgazdálkodás, hidrokultúrás növénytermesztés, alternatív szántóföldi növénytermesztés, ehhez kapcsolódó precíziós gépkezelés fejlesztése című projekt keretében jött létre.
Irodalom
Blahunka Z.-Bártfai Z.-Faust D.: Measurement optimalization by informatical entropy, Synergy 2013, SZIE GÉK, Gödöllő
Blahunka Z.-Bártfai Z.-Faust D.-Kátai L.-Szabó I.: Terrain surface monitoring with IMU equipped mobile robot, 7th International Conference on Biosystems Engineering 2017, Tartu, Észtország
Husti I.-Kovács I.: A digitalizáció alkalmazási lehetőségei a mezőgazdaságban, Mezőgazdasági technika, 2017/7
JURISICA L., DUCHON F., KASTAN D., BABINEC A.: High Precision GNSS Guidance for Field Mobile Robots (2012), International Journal of Advanced Robotic Systems
Szabó I.–Hushki M.–Bártfai Z.–Kátai L.–Lágymányosi A.: Examination of the driver’s focusing scheme during precision agricultural operation, Alkalmazkodó vízgazdálkodás: Lehetőségek és kockázatok, Konferencia, Szarvas, 2018.
Tóth L, Kovács A, Tóth T.: Korszerű fejéstechnika, termelést segítő irányítási rendszer, Mezőgazdasági Technika (2014), 55. évf. 2. sz. ISSN 0026 1890.
29
MEZŐGAZDASÁGI ÉKSZÍJHAJTÁSOK PRECÍZIÓS GÉPÜZEMELTETÉS SZEMPONTJÁBÓL LÉNYEGES ÜZEMI
PARAMÉTEREI
BÁRTFAI Zoltán1 – KÁTAI László 2 – SZABÓ István 3 – GÁRDONYI Péter 4
1 SZIE GEK, 2103 Gödöllő Páter K. u. 1, bartfai.zoltan@gek.szie.hu
2 SZIE GEK, 2103 Gödöllő Páter K. u. 1, katai.laszlo@gek.szie.hu
3 SZIE GEK, 2103 Gödöllő Páter K. u. 1, szabo.istvan@gek.szie.hu
4 SZIE GEK, 2103 Gödöllő Páter K. u. 1, gardonyi.peter@gek.szie.hu Bevezetés
A termelékenység növelése érdekében a mezőgazdasági iparágat XX. század közepétől nagyfokú gépesítés jellemzi, ezáltal a mezőgazdasági gépekkel szemben magas elvárások alakultak ki. A nagy értékű eszközrendszer optimális kihasználásához elengedhetetlen a megfelelő üzemeltetés. A gépüzemeltetés az erőgép CAN-bus rendszeréről gyűjtött adatokat alapján optimálható. Célunk az ehhez szükséges adatok meghatározása.
A mezőgépek fejlesztésénél a teljesítmény fokozása és a megbízhatóság mellett a gazdaságos üzemeltetés is lényeges irányelv, amely a gépszerkezet valamennyi részegységére igazak. A hatékonyság növelése érdekében nagy hangsúlyt fektetnek a gyártok a motorok fejlesztése mellett a munkavégző részegységek és a teljesítmény- átvitel elemeire is, amelyek a gépek összhatásfokának javítására irányulnak. A mezőgazdasági gyakorlatban a gépegységek energiaellátására elterjedten használnak rugalmas vonóelemes hajtásokat, ez ösztönözi a szíjhajtások területén történő kutatásainkat. A hajtások működésének mélyreható vizsgálatával pontos képet kapunk az üzemeltetés szempontjából fontos hajtásjellemzőkről.
Irodalmi áttekintés
Az ékszíjhajtás hatásfoka a hasznos és a bevezetett teljesítmény hányadosa. A hasznos teljesítmény a hajtott tengelyen jelenik meg, amely a szíjtárcsára átadott kerületi erő és a kerületi sebesség szorzata. A bevezetett teljesítmény a hajtó oldalon, a hajtó tárcsán keresztül tápláljuk be a rendszerbe (Kátai and Szabó, 2015):
a teljesítmény átvitel során jelentkező szíjcsúszás:
A hatásfokegyenletet tovább alakítva két tagból álló összefüggést kapunk. A zárójeles rész a mozgásveszteséget, a
κ
pedig a kerületi erőn megjelenő veszteségeket jelenti.30
Jellemzően az eddig megjelent kutatások mozgás- és egyéb nyomatékveszteségek vizsgálatán keresztül foglalkoztak az ékszíjhajtások teljesítményveszteségével. Gervas és Pronin szerint (Gervas and Pronin, 1967, 1969) az ékszíjhajtások nyomatékvesztesége egyrészt a vonóelem belső súrlódásából, amely a szíjágerők által előidézett alakváltozás mellett főként hajlítgatásából származik, másrészt a sugárirányú súrlódási veszteségből tevődik össze, amely a szíjelem tárcsahoronyba történő be- és kilépésekor jön létre. A mozgásveszteség az érintőirányú csúszásokból tevődik össze.
Anyag és módszer
A hajtásparaméter vizsgálatához hagyományos kísérleti módszer szerint (One-Factor-at- a-Time) állítottuk össze a mérési programot, ahol egyszerre az egyik hajtásparaméter lett módosítva a többi hajtásjellemző rögzített értéke mellett. A mért adatok kvalitatív analízisére többváltozós regressziós modellt használtunk. A modellek adekvát voltát varianciaanalízis (ANOVA) segítségével igazoltuk, valamint kiszámítottuk a modellben szereplő változók együtthatóinak értékét. Meghatároztuk az egyes faktorok súlyát, azaz hogy az egyes hajtásjellemzők a többi független változóhoz mérten mekkora hatást gyakorolnak a függő változóra. Az adatok elemzése Statistical Package for Social Science (SPSS) szoftverrel történt.
Eredmények és értékelésük
Az ékszíj hőmérsékletének emelkedése, azaz a kiindulási és a telítődési hőmérséklet különbség segítségével meghatároztuk a nyomatékveszteséget befolyásoló faktorokat a hajtásparaméterek körében. Az ékszíj hőmérsékletének emelkedés modell:
A hajtásparaméter vizsgálatoknál a szíjhőmérséklet mellett folyamatosan mértük a hajtás csúszását, amellyel az üzemszerű állapot fennállását is ellenőriztük. A hőmérséklet vizsgálatoknál felállított regressziós egyenlet alapján a modell:
A hajtásparaméterek vizsgálatával lehetőség nyílik a kísérletbe vont hajtások energiamérlegének létrehozására. A hajtás hatásfoka a hasznos és a bevezetett teljesítmény hányadosaként értelmezhető:
ahol a bevezetett teljesítmény a hajtó oldalon mért nyomaték és szögsebesség szorzata. A hasznos teljesítmény a hajtott tengely nyomaték és szögsebesség értékekből határoztuk meg. Az elvégzett kísérleteknél az ékszíjhajtás-beállítások hatásfoka és között változott. A vizsgálatok során mért hajtásparaméterek segítségével meghatározható a teljesítményveszteség:
31
A veszteség a 3 egyenlet szerint tovább bontható nyomaték- és mozgásveszteségből származó teljesítményveszteségekre:
ahol a nyomatékveszteség meghatározható a mért nyomatékok különbsége és a hajtó oldal szögsebességének szorzatával:
A mozgásveszteség a hajtott tengely elméletileg meghatározható szögsebességét csökkenti, ezzel szintén hozzájárul a teljesítményveszteséghez:
A 9 és a 10 egyenleteket a 8 összefüggésbe helyettesítve a 7 egyenletet kapjuk vissza:
A kísérleti beállítások teljesítmény-átvitele 450 és 1660 W között változott, ahol a teljesítményveszteség (20-153 W) is beállítástól függő érték. A veszteség további felbontását varianciaanalízis segítségével, a független változók varianciája alapján becsüljük meg (1. ábra).
1. ábra. Ékszíjhajtás kvalitatív energiamérlege Figure 1. Belt drive energy components
32
(Z/10 profil; ; ; ; ;
; )
A vizsgált ékszíjhajtások bevezetett teljesítményének 3-21%-a veszteség. A teljesítményveszteség nagyobb részét, 75-92%-át a nyomatékveszteség, a megmaradt részt a mozgásveszteség teszi ki. A nyomatékveszteség meghatározóan az ékszíj hajtogatásából (belső súrlódásból) származik, amelyet a szíj hajtogatásának sugara, illetve annak gyakorisága határoz meg. Az erőzáró hajtás érintkező felületeinek súrlódási vesztesége összetett módon jelentkezik. Egyrészt az ékszíj felületi rétegének ismétlődő deformációjából, amely nyomatékveszteségként realizálódik, illetve a szíjelem relatív elmozdulásából tevődik össze. A mozgásveszteséget a kapcsolódó felületek súrlódási viszonya befolyásolja, amelyet az átadott kerületi erő nagysága, illetve változása (átfogási ívhossz menti alakváltozás lefolyása) és az ékszíj előfeszítése határoz meg.
Összefoglalás
Az ékszíjhajtások teljesítményvesztesége mozgás- és kerületi erőn megjelenő veszteségből tevődik össze. Létrehoztuk a szíjmelegedés matematikai modelljét a hajtásparaméterek függvényében, és a független változók súlyozásával meghatároztuk az egyes paraméterek hatását. A kísérletsorozatból felállítottuk a hajtás egész rendszerre nézett csúszásának matematikai modelljét is, és szintén meghatároztuk a hajtásparaméterek hatását a vizsgált jelenségre. Az eredmények felhasználásával létrehoztuk az ékszíjhajtás energiamérlegét, és elemeztük az egyes összetevők hatását, így meghatározhatók az üzemeltetés szempontjából fontos hajtásjellemzők.
Kulcsszavak: precíziós gépüzemeltetés, ékszíjhajtás, teljesítményveszteség, Köszönetnyilvánítás
A publikáció az EFOP-3.6.1-16-2016-00016 azonosítószámú, SZIE Szarvasi Campusának kutatási és képzési profiljának specializálása intelligens szakosodással:
mezőgazdasági vízgazdálkodás, hidrokultúrás növénytermesztés, alternatív szántóföldi növénytermesztés, ehhez kapcsolódó precíziós gépkezelés fejlesztése című projekt keretében jött létre.
Irodalom
Kátai L, Szabó I.: 2015, Identification of V-belt power losses with temperature measurement. Journal of Mechanical Science and Technology 29:(8), pp. 3195-3203.
K. J. Gervas and B. A. Pronin: 1967, Calculation of power losses in belt drives, Russian Engineering Journal, 47 (3), pp. 26-29.
K. J. Gervas: 1969, Determining the power losses in V-belt drives during flexure, Soviet Rubber Technology, 28 (2) 42.
33
Agricultural flexible driving in precision machine function relevant operating parameters
Abstract
The efficiency of V-belt drives is determined by several factors collectively: the slip, the external and inner friction. In this paper the slip of the V-belt was studied as loss intensity as a function of drive parameters. The individual effects of V-belt drive parameters on speed loss are determined using one-factor-at-a-time (OFAT) test method. It was justified in the scope of the major characteristics affecting power loss that by ideally selecting the parameters of the V-belt drive power loss can be measurably reduced. Based on earlier results as well, a regression model was used to examine the slip of the V-belt. On the bases of the test results optimal parameters can be calculated to give references for V-belt drive design.
Keywords: precision machine management, V-belt, Power loss