Internal exact controllability and uniform decay rates for a model of dynamical elasticity equations for
incompressible materials with a pressure term
Adriana F. Almeida
1, Maria Astudillo
B2, Marcelo M. Cavalcanti
3and Janaina P. Zanchetta
31Federal University of Latin American Integration, 85866-000, Foz do Iguaçu, PR, Brazil
2Department of Mathematics, Federal University of Paraná, 80060-000, Curitiba, PR, Brazil
3Department of Mathematics, State University of Maringá, 87020-900, Maringá, PR, Brazil
Received 14 January 2018, appeared 8 May 2018 Communicated by Vilmos Komornik
Abstract.This paper is concerned with the internal exact controllability of the following model of dynamical elasticity equations for incompressible materials with a pressure term,
φ00−∆φ=−∇p,
and it is also devoted to the study of the uniform decay rates of the energy associated with the same model subject to a locally distributed nonlinear damping,
φ00−∆φ+a(x)g(φ0) =−∇p,
where Ω is a bounded connected open set of Rn (n ≥ 2) with regular boundaryΓ, φ= (φ1(x,t), . . . ,φn(x,t)),x = (x1, . . . ,xn)are n-dimensional vectors and p denotes a pressure term. The functiona(x)is assumed to be nonnegative and essentially bounded and, in addition,a(x)≥ a0> 0 a.e. inω ⊂Ω, whereωsatisfies the geometric control condition. The first result is obtained by applying HUM (Hilbert Uniqueness Method) due to J. L. Lions while the second one is obtained by employing ideas first introduced in the literature by Lasiecka and Tataru.
Keywords: internal exact controllability, incompressible materials, non linear damping, uniform decay rates.
2010 Mathematics Subject Classification: 35B40, 35B35, 35L99, 93D220.
1 Introduction
1.1 Description of the problem.
Let Ω be a bounded connected open set of Rn (n ≥ 2) with regular boundary Γ. Let Q = Ω×]0,T[be a cylinder whose lateral boundary is given byΣ=Γ×]0,T[.
BCorresponding author. Email: mastudillo86@gmail.com
Consider the following problem
φ00−∆φ=−∇p inQ, divφ=0 inQ,
φ=ψ on Σ,
φ(0) =φ0, φ0(0) =φ1 inΩ.
(1.1)
System (1.1) was studied by J. L. Lions [26], motivated by dynamical elasticity equations for incompressible materials. Assuming that Ω is strictly star-sharped with respect to the origin, that is, there existsγ>0 such that
m·ν≥ γ>0 on Γ, (1.2)
(wherem(x) =x = (x1, . . . ,xn)andνis the exterior unitary normal) J.L. Lions [26] proved that the normal derivative of the solutionφof the (1.1) belongs to(L2(Σ))nwhile A. R. Santos [35]
established the boundary exact controllability for problem (1.1). In this direction it is worth mentioning the work due to Cavalcanti et al. [10], in which boundary exact controllability of the viscoelastic equation
φ00−∆φ−
Z t
0 g(t−s)∆φ(s)ds=−∇p, has been studied.
System (1.1) may be obtained from Newton’s second law considering small deflections of Ω, where Ω is a solid body composed of elastic, isotropic, incompressible materials (like some rubber types). For more information on the physical interpretation of this model see A. R. Santos [34] and Cavalcanti et al. [10].
Inspired by the above mentioned works we study, in natural way, in Section 2, the internal exact controllability of the system
φ00−∆φ= −∇p+hχω inQ, divφ=0 inQ,
φ=0 onΣ,
φ(0) =φ0, φ0(0) =φ1 inΩ,
(1.3)
where∆φ= (∆φ1, . . . ,∆φn),φ00= (φ100, . . . ,φ00n), divφ=∑ni=1 ∂φ∂xi
i and p= p(x,t)is the pressure term. In addition,ω ⊂ Ωandχω is the characteristic function ofω whereω is a neighbour- hood of the boundaryΓsatisfying the well-known geometric control conditions.
The exact controllability problem for system (1.3) is formulated as follows: given T > 0 large enough, for every initial date{φ0,φ1}in a suitable space, it is possible to find a control hsuch that the solution of (1.3) satisfies
φ(x,T) =φ0(x,T) =0.
Next, in Section 3, we are going to investigate the uniform decay rates of the energy associated with problem (1.1) subject to a locally distributed nonlinear damping as follows
φ00−∆φ+a(x)g(φ0) =−∇p in Ω×(0,∞), divφ=0 inΩ×(0,∞),
φ=0 onΣ,
φ(0) =φ0, φ0(0) =φ1 inΩ,
(1.4)
where a∈ L∞(Ω)is a nonnegative function such that
a(x)≥a0>0 inω ⊂Ω (1.5)
and
g :Rn−→Rn
s7−→g(s) = [gi(si)]i=1,...,n (1.6) where, for all i=1, . . . ,n, gi :R−→Ris a function such that
gi is continuous monotonic increasing and gi(0) =0, gi(si)si >0 ∀ si 6=0,
k|si|2 ≤ gi(si)si ≤K|si|2 ∀ |si| ≥1, for some positive constantsk and K.
(1.7)
1.2 Main goal, methodology and previous results.
The main goal of this paper is twofold: First, to obtain the exact internal controllability of the system (1.3) and then use this result to prove that the solutions of problem (1.4) decay exponentially to zero.
System (1.1) was first introduced by J. L. Lions [26]. In his work, J. L. Lions proved the hidden regularity property holds for this linear system, under the condition that the domain is star-shaped. Taking advantage of this property and an inverse inequality due to Cavalcanti et al. [10], we are able to obtain the direct and inverse inequalities needed to obtain the internal controllability.
In order to obtain the stabilization result, we use an approach first introduced by Lasiecka and Tataru in [20] which allows us not to impose any growth condition of the function gnear the origin and show that the energy decays as fast as the solution of an associated differential equation. Indeed, we are able to establish general decay rates of the energy given by
E(t)≤S t
T0 −1
, ∀t>T0 and driven by the solution S(t)of the nonlinear ODE
St+q(S(t)) =0,
whereqis a strictly increasing function in connection with the damping termg(ut). Moreover, under some extra conditions on the class of nonlinear dissipation and assuming that the pressure is constant, we give examples of the explicit decay rates.
A different but related approach is provided by Alabau-Boussouira and Ammari in [3], where the authors obtained sharp, simple and quasi-optimal decay rates for nonlinearly damped abstract infinite-dimensional systems. The method employed by the authors relies on an observability inequality for the conservative system and some comparison properties, com- bining optimal geometric conditions as provided by Bardos et al. [6] with an optimal-weight convexity method of Alabau-Boussouira (see [1] and [2]).
On the other hand, although the bibliography concerning the wave equation subject to a locally distributed damping is truly long, see, for instance, [1,2,6,12–18,21,22,27–29,31,38,40], and a long list of references therein, it seems that there exist just few papers in connection
with control or stabilization for the model of dynamical elasticity equations for incompress- ible materials introduced by J. L. Lions [26]. In [33] Oliveira and Charão also studied the decay properties of the solutions of an incompressible vector wave equation with a locally distributed nonlinear damping. However, in order to obtain the algebraic decay rate to zero of the solution, the authors imposed some extra technical conditions on the function g like the fact that the partial derivative of gis positive definite which will not be necessary in our present study. In order to get this result, the authors used multiplier methods and a lemma due to Nakao. The exponential decay rate of the energy for the case of an incompressible vector wave equation with localized linear dissipation was obtained by Araruna et al. [4]. In a more general framework, a problem that is similar to (1.1), is studied in [19], where Ammari, Feireisl and Nicaise proved exponential and polynomial decay rates for an acoustic system with spatially distributed damping.
2 Internal exact controllability
In what follows, we consider the Hilbert spaces
V ={v∈ (H01(Ω))n and divv =0 in Ω}, (2.1) and
H={v∈ (L2(Ω))n, divv=0 and v·ν=0 on Γ}, (2.2) equipped with their respective inner products
((u,v)) =
∑
n i=1((ui,vi))H1
0(Ω), (2.3)
(u,v) =
∑
n i=1(ui,vi)L2(Ω). (2.4) We also consider
V = {ϕ∈(D(Ω))n, divϕ=0}, (2.5) and
W =V∩(H2(Ω))n. (2.6)
We have thatV is dense inV with topology induced byVand
H=V(L2(Ω))n. (2.7)
We observe that throughout this paper repeated indexes indicate summation from 1 ton.
2.1 Direct and inverse inequalities Let us consider the following problem
φ00−∆φ=−∇p inQ, divφ=0 inQ,
φ=0 onΣ,
φ(0) =φ0, φ0(0) =φ1 inΩ.
(2.8)
Firstly, observe that following the arguments [37] we can show that for regular initial data the problem (2.8) is equivalent to the problem
(
φ00+Aφ=0 inQ,
φ(0) =φ0, φ0(0) =φ1 inΩ, (2.9) where A is Stokes operator defined as follows: A : (H2(Ω))n∩V → H given by Au := P(−∆u) where P : (L2(Ω))n → H is the orthogonal projector in (L2(Ω))n onto H and ∆ : (H2(Ω))n∩V →(L2(Ω))n is the Laplace operator with Dirichlet boundary conditions.
In this section we are going to obtain the direct and inverse inequalities to problem (2.8) which is enough to apply HUM (Hilbert Uniqueness Method) in order to obtain the above mentioned exact controllability. For this end we will employ the multiplier technique. The main results of this section are Theorem 2.1and Theorem2.4below.
Theorem 2.1. Let{φ0,φ1} ∈ H×V0 andφthe ultra weak solution of the problem(2.8). Then, there exists a constant C1>0such that
Z T
0
Z
ω
|φ|2dxdt≤C1
|φ0|2H+kφ1k2V0
. (2.10)
Proof. Sinceφ is the ultra weak solution to problem (2.8) then making use of standard prop- erties of ultra weak solutions for linear problems (see Cavalcanti [10, Section 5] or Lions [25, Chap. 1, Section 4]) there existsC0>0 such that
kφk2L∞(0,T;H)+kφ0k2L∞(0,T;V0)≤ C0
|φ0|2H+kφ1k2V0
. (2.11)
From (2.11) and L∞(0,T;H),→ L2(0,T;H)we have the desired result.
Remark 2.2. Arguing as in [7, Chap. 5] or [39, Chap. 2] it is possible to show the existence of a function p ∈ H−1(0,T;L20(Ω))such that (1.3) is satisfied inD0(Q). Moreover, there exists C>0 such that
kpkH−1(0,T;L20(Ω))≤ C(|φ1|H+kφ0kV+khχωkL2(0,T;H)), (2.12) where L20(Ω)≈ L2(Ω)/R.
Remark 2.3. As it is stated in Lions [25, Chap. I, Lemma 3.7] ifφ∈ (H01(Ω)∩H2(Ω))n, then
∂φi
∂xk =νk∂φi
∂ν onΓ; ∀i,k ∈ {1, . . . ,n}. (2.13) Moreover, if divφ=0 inΩ, then as in Lions [25, Chap. II, section 5] we have
∂φ
∂ν·ν=0 on Γ (2.14)
and consequently
νi∂φi
∂xk = νiνk∂φi
∂ν on Γ. (2.15)
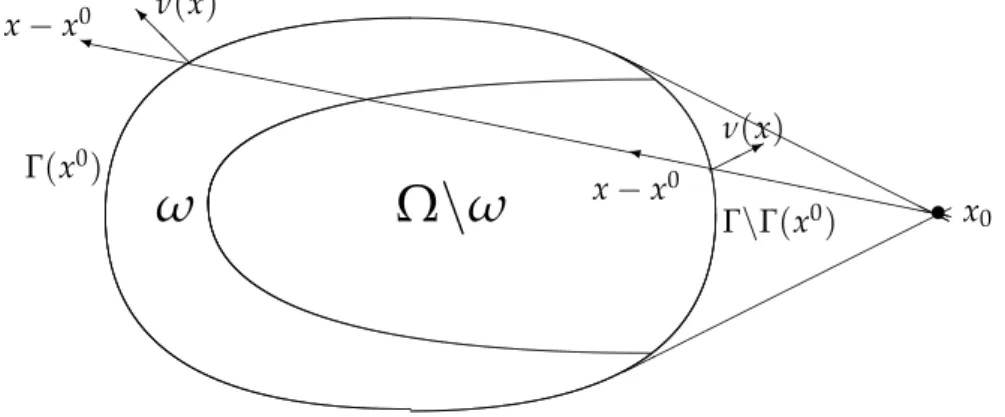
Letx0∈ Rn,m(x) =x−x0,x ∈Rn andR0=max{km(x)k;x∈Ω}. We assume thatω⊂Ωis a neighborhood ofΓ(x0)where
Γ0= Γ(x0) ={x∈ Γ;m(x)·ν(x)>0}, Γ1= Γ\Γ(x0) ={x∈Γ;m(x)·ν(x)≤0}, Σ0= Σ(x0) =Γ0(x0)×[0,T],
Σ1= Σ\Σ0 =Γ1(x0)×[0,T].
(2.16)
As an example of a domain Ω satisfying the above assumption let us consider the Fig- ure2.1 below:
Γ(x0)
Γ\Γ(x0)
ω Ω \ ω
HH x0 HHH HH HH HH
H H
``
``
``
``
``
``
``
``
``
``
``
``
``
`` i
y x−x0
* ν(x)
@
@ x−x0 Iν(x)
``•
Figure 2.1: Description of a subsetω of a domainΩ which is a neighborhood ofΓ(x0).
Theorem 2.4. Let us consider T > T0, where T0 = 2R0, as in Theorem 3.3 due to Cavalcanti et al. [10]. Then, there exists a constant C2>0such that
|φ0|2H+kφ1k2V0 ≤C2
Z T
0
Z
ω
|φ|2dxdt. (2.17)
Proof. Suppose that the following estimate holds kθ0k2V+|θ1|2H ≤C2
Z T
0
Z
ω
|θ0|2dxdt, (2.18)
whereθ is solution of the problem (2.8) with initial data {θ0,θ1} ∈V×H. Then we have the desired result. Indeed, take{φ0,φ1} ∈H×V0. Since−φ1 ∈V0and the operator−∆:V−→V0 is an isometric isomorphism, there existsη∈V such that
−∆η= −φ1. (2.19)
Let us define
ψ(t) =
Z t
0 φ(s)ds+η, (2.20)
whereηsatisfies (2.19) andφis the solution to problem
φ00−∆φ=−∇(∂t∂p) inQ, divφ=0 inQ,
φ=0 onΣ,
φ(0) =φ0, φ0(0) =φ1 inΩ.
(2.21)
Thus we have thatψis the solution to problem
ψ00−∆ψ=−∇p in Q, divψ=0 inQ,
ψ=0 onΣ,
ψ(0) =η, ψ0(0) =φ0 inΩ.
(2.22)
From (2.18) and (2.22) we have
|φ0|2H+kφ1k2V0 ≤C2 Z T
0
Z
ω
|φ|2dxdt.
We will prove (2.18) in several steps.
By Theorem 3.3 due to Cavalcanti et al. [10], for T > T0 = 2R0 the following inequality holds
Eθ(0)≤C Z T
0
Z
Γ0
∂θ
∂ν
2
dΓdt, (2.23)
whereθ is the weak solution of the problem (2.8) with the initial data{θ0,θ1} ∈V×H.
Lemma 2.5. Let m∈(C1(Ω))n.Then, for all regular solutions of (2.8), the following identity holds h∇p,m· ∇φiL2(Q)n =h∇p,φ· ∇miL2(Q)n− h∇p,φ(divm)iL2(Q)n.
Proof. Let us consider
X= −
Z T
0
Z
Ω
∂p
∂ximk∂φi
∂xkdxdt.
Integrating by parts with respect toxk and using the fact thatφ=0 onΣ, we get X=
Z T
0
Z
Ω
∂
∂xk ∂p
∂xi ·mk
·φidxdt
=
Z T
0
Z
Ω
∂2p
∂xi∂xkmkφidxdt+
Z T
0
Z
Ω
∂p
∂xi
∂mk
∂xkφidxdt.
(2.24)
Integrating by parts the first integral, with respect toxi, we obtain Z T
0
Z
Ω
∂2p
∂xi∂xkmkφidxdt= −
Z T
0
Z
Ω
∂p
∂xk
∂mk
∂xi φidxdt−
Z T
0
Z
Ω
∂p
∂xkmk∂φi
∂xidxdt.
Since divφ=0 on Q, we conclude that Z T
0
Z
Ω
∂2p
∂xi∂xkmkφidxdt= −
Z T
0
Z
Ω
∂p
∂xk
∂mk
∂xi φidxdt.
Therefore,
X=−
Z T
0
Z
Ω
∂p
∂xk
∂mk
∂xi φidxdt+
Z T
0
Z
Ω
∂p
∂xi
∂mk
∂xkφidxdt and the proof is finished.
Lemma 2.6. Let T > T0 andε> 0be such that T−2ε > T0. Letθ be the solution of problem(2.8) with initial data{θ0,θ1} ∈V×H. Then, there exists C>0such that
Eθ(0)≤C Z T−ε
ε
Z
Γ0
∂θ
∂ν
2
dΓdt. (2.25)
Proof. Sinceθis the weak solution of problem (2.8),θ∈ C([0,T],V)∩C1([0,T],H)∩C2([0,T],V0). In particular,
θ00−∆θ= −∇p inC([0,T−2ε],V0), divθ=0 inΩ×(0,T−2ε),
θ =0 onΓ×(0,T−2ε), θ(0) =θ0, θ0(0) =θ1 inΩ.
(2.26)
From (2.23) and (2.26) we have
Eθ(0)≤C Z T−2ε
0
Z
Γ0
∂θ
∂ν
2
dΓdt. (2.27)
Let 0≤t≤ T−2εand defineη(t) =θ(t+ε)and∇q=∇p(x,t+ε). Then,
η00−∆η= −∇q inC([0,T−2ε],V0), divη=0 inΩ×(0,T−2ε),
η=0 onΓ×(0,T−2ε),
η(0) =θ(ε), η0(0) =θ0(ε) in Ω,
(2.28)
analogously to what we have done in (2.27), we obtain, Eη(0)≤C
Z T−2ε
0
Z
Γ0
∂η
∂ν
2
dΓdt. (2.29)
SinceEη(0) =Eθ(ε) =Eθ(0)and making the change of variables=t+ε, we infer Eθ(0)≤C
Z T−ε
ε
Z
Γ0
∂θ
∂ν
2
dΓdt.
FixT >T0 andε >0 such thatT−2ε> T0. Let us considerh∈(C1(Ω))n such that
h·ν ≥0 for everyx ∈Γ, h= νonΓ0,
h= 0 inΩ\ω.
Letη∈C1(0,T)such thatη(0) =η(T) =0 and η(t) =1 in]ε,T−ε[. Let us definer(x,t) =η(t)h(x)which belongs[W1,∞(Q)]nand satisfies
r(x,t) =ν(x), for every(x,t)∈ Γ0×]ε,T−ε[, r(x,t)·ν(x)≥0, for every(x,t)∈Γ×]0,T[, r(x, 0) =r(x,T) =0, for every x∈Ω, r(x,t) =0, for every(x,t)∈(Ω\ω)×]0,T[.
(2.30)
Lemma 2.7. Let T > T0 andε > 0 be such that T−2ε > T0. Letθ be the solution of problem(2.8) with initial data{θ0,θ1} ∈V×H.Then, there exists C >0such that
Eθ(0)≤C Z T−ε
ε
Z
ω
|θ|2+|θ0|2+|∇θ|2dxdt, (2.31)
where∇θ means
∂θ1
∂x1 · · · ∂x∂θn .. 1
. . .. ...
∂θ1
∂xn · · · ∂x∂θn
1
. (2.32)
Proof. Initially considering the regular initial data, one obtains the general result using density arguments. In equation (2.8)1, taking the inner product in (L2(Ω))n of θ00−∆θ+∇p and r· ∇θ, and integrating in [0,T], we obtain
1 2
Z T
0
Z
γ
r·ν
∂θ
∂ν
2
dγdt= 1 2
Z T
0
Z
Ω(divr)(|θ0|2− |∇θ|2)dxdt+
Z T
0
Z
Ω
∂θi
∂xj
∂rk
∂xj
∂θi
∂xkdxdt
−
Z T
0
Z
Ωθi0r0k∂θi
∂xkdxdt+
Z T
0
Z
Ω
∂p
∂xirk∂θi
∂xkdxdt.
(2.33)
Indeed, note that Z T
0
(θ00,r· ∇θ)dt−
Z T
0
(∆θ,r· ∇θ)dt=−
Z T
0
(∇p,r· ∇θ)dt. (2.34) Introduce the notations
J1 :=
Z T
0
(θ00,r· ∇θ)dt, J2 :=−
Z T
0
(∆θ,r· ∇θ)dt, J3 :=−
Z T
0
(∇p,r· ∇θ)dt.
Next, we are going to estimate these terms.
Using integration by parts and the properties of the function r(x,t) defined in (2.30), we deduce J1, satisfies
J1=
Z T
0
(θ00,r· ∇θ)dt=−
Z T
0
Z
Ωθ0ir0k∂θi
∂xkdxdt−
Z T
0
Z
Ωθ0irk∂θ0i
∂xkdxdt
| {z }
Je1
.
Then Gauss’s Formula yields Z
Ω
∂
∂xk
θ
02 i rk
dx=
Z
Γθ
02 i rkνkdΓ, and sinceθ0i(x,t) =0 onΣ, we deduce that
Je1 =−1 2
Z T
0
Z
Ωθ
02 i
∂rk
∂xkdxdt.
Thus
J1 = −
Z T
0
Z
Ωr0k∂θi
∂xkθ0idxdt+1 2
Z T
0
Z
Ωθ
02 i
∂rk
∂xkdxdt
= −
Z T
0
(θ0,r0· ∇θ)dt+ 1 2
Z T
0
Z
Ω|θ0|2divr dxdt.
(2.35)
Furthermore, we have for the term J2 J2 :=−
Z T
0
(∆θ,r· ∇θ)dt=−
Z T
0
Z
Ω
∂2θi
∂x2j rk∂θi
∂xkdxdt.
From Gauss’s formula and (2.13), we have J2=
Z T
0
Z
Ω
∂θi
∂xj
∂
∂xj
rk∂θi
∂xk
dxdt
| {z }
Je2
−
Z T
0
Z
Γrk∂θi
∂xk
∂θi
∂νdΓdt. (2.36)
Notice that
Je2 =
Z T
0
Z
Ω
∂θi
∂xj
∂rk
∂xj
∂θi
xk dxdt+ 1 2
Z T
0
Z
Ωrk ∂
∂xk ∂θi
∂xj 2
dxdt
| {z }
ee J2
. (2.37)
From Gauss’s formula and (2.13), we deduce that ee
J2 = 1 2
Z T
0
Z
Γrkνk ∂θi
∂ν 2
dΓdt−1 2
Z T
0
Z
Ω
∂rk
∂xk ∂θi
∂xj 2
dxdt. (2.38)
Thus from (2.36), (2.37), (2.38) and (2.13), we have
J2=
Z T
0
Z
Ω
∂θi
∂xj
∂rk
∂xj
∂θi
xk dxdt− 1 2
Z T
0
Z
Ωdivr(|∇θ|2)dxdt− 1 2
Z T
0
Z
Γ(r·ν)
∂θ
∂ν
2
dΓdt. (2.39) For the term J3 we have
J3= −
Z T
0
(∇p,r· ∇θ)dt=−
Z T
0
Z
Ω
∂p
∂xirk∂θi
∂xkdxdt. (2.40)
Therefore, from (2.34), (2.35), (2.39) and (2.40) we infer 1
2 Z T
0
Z
Γ(r·ν)
∂θ
∂ν
2
dΓdt= 1 2
Z T
0
Z
Ω(divr)(|θ0|2− |∇θ|2)dxdt−
Z T
0
(θ0,r0· ∇θ)dt +
Z T
0
Z
Ω
∂θi
∂xj
∂rk
∂xj
∂θi
∂xkdxdt+
Z T
0
Z
Ω
∂p
∂xirk∂θi
∂xkdxdt.
(2.41)
Note that by Lemma2.5we have that Z T
0
Z
Ω
∂p
∂xirk∂θi
∂xkdxdt=h∇p,−θ· ∇r+θ(divr)iH−1(Q)n,H01(Q)n. (2.42) Therefore
Z T
0
Z
Ω
∂p
∂xirk∂θi
∂xkdxdt
≤δk∇pk2H−1(Q)n+Cδ Z T
0
Z
ω
|θ|2+|θ0|2+|∇θ|2dxdt.
Using the properties of r(x,t) and estimating others term on the right side of equality (2.41), we obtain that
1 2
Z T
0
Z
Γ(r·ν)
∂θ
∂ν
2
dΓdt≤δk∇pk2H−1(Q)n+C Z T
0
Z
ω
|θ|2+|θ0|2+|∇θ|2dxdt. (2.43)
Therefore, by Lemma2.6and (2.43) we have Eθ(0)≤ 1
2 Z T−ε
ε
Z
Γ0
∂θ
∂ν
2
dΓdt= 1 2
Z T−ε
ε
Z
Γ0
(r·ν)
∂θ
∂ν
2
dΓdt
≤ 1 2
Z T
0
Z
Γ(r·ν)
∂θ
∂ν
2
dΓdt
≤ δk∇pk2H−1(Q)n+C Z T
0
Z
ω
|θ|2+|θ0|2+|∇θ|2dxdt.
(2.44)
Using the factk∇pk2
H−1(Q)n ≤ CEθ(0), by (2.44) and choosingδsmall enough we have Eθ(0)≤C
Z T
0
Z
ω
|θ|2+|θ0|2+|∇θ|2dxdt.
Since the inequality above is valid for allT> T0, in particular forT−2ε, proceeding as in the demonstration of Lemma 2.6we have the desired result.
Remark 2.8. According to the proof of Lemma 2.3 in J. L. Lions [25] we can construct a neighbourhood ˆω ofΓ0 such thatΩ∩ωˆ ⊂ωand we can to build a vector field ˆr for ˆw. Then, we get analogously, that
Eθ(0)≤ C Z T−ε
ε
Z
ˆ ω
|θ|2+|θ0|2+|∇θ|2dxdt.
Now, let us consider a functionr=r(x,t)∈W1,∞(Q)that satisfies
r(x,t)≥0, for every (x,t)∈Ω×]0,T[, r(x,t) =1, for every (x,t)∈ωˆ×]ε,T−ε[, r(x,t) =0, for every (x,t)∈(Ω\ω)×]0,T[,
0<r(x,t)<1, for every (x,t)∈ (ω\ωˆ)×]0,T[and ˆω×(]0,ε]∪[T−ε,T[), r(x, 0) =r(x,T) =0, for every x∈ Ω,
|∇r|2
r ∈ L∞(ω×]0,T[ ).
(2.45)
The function r can be chosen as follows r(x,t) = ρ2(x)η(t) where η ∈ C1(0,T) and it
satisfies
η(0) =η(T) =0, η(t) =1, in ]ε,T−ε[,
0<η(t)<1, in ]0,ε[ ∪ ]T−ε,T[, andρ∈C1(Ω)satisfies
ρ(x) =1, for every x∈ ω,ˆ ρ(x) =0, for every x∈ Ω\ω, 0<ρ(x)<1, for every x∈ω\ω.ˆ
Proposition 2.9. Let us consider T > T0 and ε > 0 such that T−2ε > T0 andθ the solution of problem(2.8)with initial data {θ0,θ1} ∈V×H.Then, there exists a constant C >0such that
Eθ(0)≤C Z T
0
Z
ω
|θ|2+|θ0|2dxdt. (2.46)
Proof. Initially we consider regular initial data and one obtains the general result using density arguments. In equation (2.8)1, taking the inner product in (L2(Ω))n of θ00−∆θ+∇p andrθ and integrating in[0,T], we obtain
Z T
0
Z
Ωθ00irθidxdt−
Z T
0
Z
Ω∆θirθidxdt=−
Z T
0
Z
Ω
∂p
∂xirθidxdt. (2.47) Next, we are going to estimate the terms in (2.47).
Denote by
I1 :=
Z T
0
Z
Ωθ00irθidxdt.
I2 :=−
Z T
0
Z
Ω∆θirθidxdt, I3 :=−
Z T
0
Z
Ω
∂p
∂xirθidxdt.
Using the properties of the functionr(x,t)defined in (2.45) and making use of the equality (θi0,rθi)0 = (θ00i ,rθi) + (θi0,r0θi) + (θ0i,rθi0), we have that I1 can be estimated as follows
I1 =
Z T
0
Z
Ωθ00irθidxdt=−
Z T
0
Z
Ωθi0r0θidxdt−
Z T
0
Z
Ωθ0irθi0dxdt. (2.48) Notice that using Gauss’s formula and taking θ = 0 on Σ into account, we infer that I2
verifies
I2 =−
Z T
0
Z
Ω∆θirθidxdt=
Z T
0
Z
Ω∇θi(∇r)θi+r|∇θi|2dxdt. (2.49) Replacing (2.48), (2.49) in (2.47), we obtain
Z T
0
Z
Ωr|∇θi|2dxdt=
Z T
0
Z
Ωr|θi0|2dxdt+
Z T
0
Z
Ωr0θ0iθidxdt
−
Z T
0
Z
Ω∇θi(∇r)θidxdt−
Z T
0
Z
Ω
∂p
∂xirθidxdt.
(2.50)
By Young’s inequality we obtain that Z T
0
Z
Ωr0θi0θidxdt≤C Z T
0
Z
Ω(|θi0|2+|θi|2)dxdt. (2.51) Making use of the inequalityab ≤ 12a2+ 12b2, we can write
Z T
0
Z
Ω∇θi(∇r)θidxdt
=
Z T
0
Z
Ωr12∇θi∇r r12 θidxdt
≤ 1 2
Z T
0
Z
Ωr|∇θi|2+1 2
Z T
0
Z
Ω
|∇r|2
r |θi|2dxdt.
(2.52)
By the Cauchy–Schwarz inequality and by Young’s inequality we have that Z T
0
Z
Ω
∂p
∂xirθidxdt≤δkpk2H−1(0,T;L2(Ω)n)+CδkrθkH1
0(0,T;L2(Ω)n) (2.53) for anyδ>0.
Combining (2.51), (2.52) and (2.53) we obtain Z T
0
Z
ω
r|∇θ|2dxdt≤ C Z T
0
Z
ω
|θ0|2+|θ|2dxdt+δkpk2H−1(0,T;L2(Ω)n). (2.54) However,
Z T−ε
ε
Z
ˆ ω
|∇θi|2dxdt=
Z T−ε
ε
Z
ˆ ω
r|∇θi|2dxdt≤
Z T
0
Z
ω
r|∇θi|2dxdt. (2.55) From (2.54) and2.55, we obtain
Z T−ε ε
Z
ˆ ω
|∇θi|2dxdt≤ C Z T
0
Z
ω
|θ0i|2+|θi|2dxdt+δkpk2H−1(0,T;L2(Ω)n). (2.56) From Remark2.8and (2.56) we obtain
Eθ(0)≤C Z T
0
Z
ω
|θ0|2+|θ|2dxdt+δkpk2H−1(0,T;L2(Ω)n). (2.57) By (2.57) and choosingδ small enough we have
Eθ(0)≤C Z T
0
Z
ω
|θ0|2+|θ|2dxdt. (2.58)
Proposition 2.10. Let T >T0andε>0be such that T−2ε>T0,ωa neighborhood ofΓ0previously cited andθ the solution of the(2.8) with{θ0,θ1} ∈ V×H.Then, there exists a constant C>0such that
Z T
0
Z
ω
|θ|2dxdt≤C Z T
0
Z
ω
|θ0|2dxdt. (2.59)
Proof. We argue by contradiction. Let us suppose that (2.59) is not verified, then for every m∈ Nlet{θ0m,θm1} ∈V×Hbe a sequence of initial data where the corresponding solutions {θm}of the problem (2.8) verify
mlim→∞
RT 0
R
ω|θm|2dxdt RT
0
R
ω|θ0m|2dxdt
= +∞, (2.60)
or, equivalently,
mlim→∞
RT 0
R
ω|θm0 |2dxdt RT
0
R
ω|θm|2dxdt =0. (2.61)
Defining
αm =qkθmkL2(0,T,Hω) and ψm = θm
αm, (2.62)
where Hω ={u; u∈(L2(ω))n; divu=0 and u·ν=0 on Γ}, then we obtain
kψmkL2(0,T,Hω) =1. (2.63)
It is easy to see that
Eψm = 1
α2mEθm (2.64)
From Proposition2.9 we have Eψm(0)≤
Z T
0
Z
ω
|ψ0m|2+|ψm|2dxdt.
then, by (2.61), (2.62) and (2.63)
Eψm(0)≤L. (2.65)
Therefore, there exist subsequences of the{ψ0m},{ψ1m}, denoted in the same way, such that ψm0 *ψ0 inV,
ψm1 *ψ1 inH.
SinceEψm(t) =Eψm(0)≤Lwe conclude that there exist subsequences of{ψm}, denoted in the same way, such that
{ψm} is bounded in L∞(0,T;V), (2.66) {ψ0m} is bounded in L∞(0,T;H). (2.67) From (2.66) and (2.67), we infer that there exist subsequences, denoted in the same way, such that
ψm *∗ ψ (weak star) in L∞(0,T;V), (2.68) ψm0 *∗ ψ0 (weak star) in L∞(0,T;H). (2.69) SinceV,→ His compact, then from Theorem 5.1 due to J. L. Lions [24], we have
ψm →ψ in L2(0,T,H). (2.70)
From (2.61) and (2.69) we have that
ψ0(x,t) =0 inω×(0,T) (2.71) andψis independent oft inω.
From the above convergence results, we have thatψis solution of problem (2.9) with initial data{ψ0,ψ1} ∈V×H. In order to achieve a contradiction it is enough to prove thatEψ(0) =0.
Indeed, sinceEψ(t) =Eψ(0), we have that|ψ0|2H+kψk2V =0 henceψ=0 in Qcontradicting (2.63) and (2.70). In order to prove this, we consider the following system
(
ξ00+Aξ =0 inQ,
ξ(0) =−ψ1, ξ0(0) = Aψ0 inΩ, (2.72) with{−ψ1,Aψ0} ∈H×V0, where Ais the Stokes operator.
Taking v(x,t) = ψ0(x)−RT
0 ξ(x,s)ds, then v solves (2.9) with initial dates {ψ0,ψ1} ∈ V×H.
Therefore, from the uniqueness of solutions of (2.9) , we have that
v=ψ (2.73)