Dr. Szabó, Tamás
Szerzői jog © 2014 Miskolci Egyetem
A tananyag a TÁMOP-4.1.2.A/1-11/1-2011-0042 azonosító számú
„ Mechatronikai mérnök MSc tananyagfejlesztés ” projekt keretében készült. A tananyagfejlesztés az Európai Unió támogatásával és az Európai Szociális Alap társfinanszírozásával valósult meg.
Kézirat lezárva: 2014 február
A kiadásért felel a(z): Miskolci Egyetem Felelős szerkesztő: Miskolci Egyetem 2014
Mechatronikai Modellezés
D. Schramm
( ) ( ) ( )
(
(
n 2 n 2) (
n 3 n 3)
1 n 1 n n
n 1
n 1 n 1
n 1 n
t , x f 19 t
, x f 106
t , x f 264 t
, x f 646 t
, x f 720 251 x h
x
−
−
−
−
−
− +
+
− +
−
+
− +
+
=
Vehicle fixed coordinate system F4
Wheel carriage
F3
F5
F2
F1
P2
P1
P4
P3
P5 l2
l1
l5
l3
l4
C Cz
XF
YF
ZF
OF
x x g y
∫ .
x u f
Dynamic system Measuring
system 0
Direct passage
x = f(x, u, t) y = g(x, u, t)
u y
tn+1
x
x(t)
h
True solution x(tn+1)
Local discretisation error xn+1 approximate solution Tangent
x(tn)
tn t
Tartalomjegyzék
1 Bevezetés 7
1.1 Bevezető példák ... 7
1.2 A dinamikai rendszer ... 10
1.2.1 Definíciók ... 10
1.2.2 A rendszerek osztályozása ... 15
1.3 Rendszermodellek ... 16
1.3.1 Modelltípusok ... 16
1.3.2 Rendszerelemzés ... 17
1.3.3 Rendszer szimuláció ... 18
1.3.4 Rendszeridentifikáció (lásd 10. fejezet) ... 20
1.3.5 Rendszeroptimalizálás (lásd 10. fejezet) ... 21
1.3.6 Modell sémák és blokkvázlatok ... 22
1.4 A rendszerdinamika feladata ... 26
1.5 Összefoglalás ... 27
2 A dinamikai rendszerek matematikai leírása 29 2.1 Differenciál-egyenletek ... 29
2.2 Állapotegyenletek ... 33
2.3 Állandósult megoldások és egyensúlyi helyzetek ... 36
2.4 Lineáris állapotegyenletek ... 37
2.5 Rendszerdinamika jellemző feladatainak elemzése az állapotegyenletek segítségével [3] ... 44
3 Differenciálagebrai-egyenletrendszer, multiport módszer 47 3.1 Differenciálalgebrai-egyenletrendszer (DAE-rendszerek) ... 47
3.2 A hálózati módszer (“Cut-Set” vagy Multiport módszer) ... 52
3.2.1 Alapgondolat ... 52
3.2.2 Az egyenlet szerkezete ... 54
3.2.3 Példák ... 57
4 Az állapottér egyenletek megoldásának előállítása a fázissíkon 65 4.1 A megoldás tervezése a fázissíkon ... 68
4.2 Lineáris állapotegyenletek megoldási módszerei ... 70
4.2.1 A homogén rendszer megoldása, alapmátrix ... 70
4.2.2 Az inhomogén állapotegyenlet megoldása ... 74
5 Az állapot egyenletek normál koordinátákkal 77 5.1 Normál koordináták ... 77
5.2 Többszörös sajátértékű rendszerek viselkedése... 87
5.2.1 Többszörös sajátértékek hatása [3] ... 87
5.2.2 Jordan-féle normálalak ... 89
6 Dinamikai rendszerek numerikus módszerei 94 6.1 Bevezetés ... 94
6.1.1 Taylor-sorfejtés ... 94
6.1.2 Numerikus algoritmusok ... 95
6.1.3 Kerekítési hiba és a hiba terjedése ... 96
7 Kezdeti érték feladat megoldásának numerikus módszerei 98 7.1 Kezdetiérték feladat numerikus megoldása ... 98
7.1.1 Explicit Euler módszer ... 98
7.1.2 Numerikus stabilitás és stabilitási tartomány ... 102
7.1.3 Módosított Euler módszer (Trapézszabály) ... 103
7.1.4 Implicit Euler módszer ... 108
7.1.5 Az Euler módszerek összefoglalása ... 108
7.1.6 Általános egylépéses eljárás ... 109
7.1.7 Adaptív lépésválasztás ... 117
7.1.8 Lineáris többlépéses módszerek ... 120
7.1.9 Lineáris többlépéses eljárás aktiválása ... 124
7.1.10 Differenciál egyenletrendszer ... 125
7.1.11 BDF módszerek [11] ... 125
7.1.12 Megjegyzések a stiff differenciálegyenletekre ... 127
7.1.13 Implicit Runge-Kutta módszerek ... 135
7.1.14 Kezdetiérték feladatok numerikus megoldási módszerereinek összehasonlítása ... 137
8 Nemfolytonos rendszerek integrálása, DAE 139 8.1 Nem folytonos rendszerek integrálása ... 139
8.2 Differenciál algebrai egyenletek (DAE) ... 140
9 Nemlineáris rendszeregyenletek numerikus megoldása 146 9.1 Nemlineáris egyenletek ... 146
9.2 Megoldás numerikus integrálás ... 150
9.3 Fixpont iteráció ... 151
9.4 Newton-Raphson iteráció ... 153
10Identifikáció és optimalizálás, stabilitás 156 10.1 Lineáris kompenzációs feladat ... 157
10.2 Nemlineáris paraméterfüggés ... 160
10.3 Dinamikai rendszerek stabilitása ... 162
Szakkifejezések és meghatározások... 162
10.4 Lineáris rendszerek stabilitási kritériumai ... 164
10.4.1 Stodola-féle stabilitási kritériumok ... 165
10.4.2 Hurwitz kritérium ... 165
10.4.3 Routh-féle stabilitási kritériumok ... 167
11Mechanikai rendszerek modellezése 169 11.1 Alapfogalmak ... 169
11.1.1 Modellezés: tömeg, rugalmasság és csillapítás ... 169
11.1.2 Erők, rendszerhatár, részekre bontás módszere ... 171
11.1.3 Kényszerek ... 172
11.1.4 Virtuális elmozdulások ... 173
11.1.5 Kinematika ... 176
11.2 Impulzus- és perdülettételek ... 182
11.3 A kényszerek figyelembevétele és a d’Alembert elv ... 182
11.4 Mozgásegyenletek ... 183
11.5 Kettős inga mozgásegyenletei... 184
11.6 Lineáris mozgásegyenletek ... 188
11.7 Állapotegyenletek ... 192
12Lagrange-féle másodfajú mozgásegyenlet 193 13Nemlineáris egynyomvonalú modell [10] 198 13.1 Az alváz mozgásegyenlete ... 199
13.2 Abroncsmodell ... 200
13.2.1 Stacionárius abroncsmodell ... 200
13.2.2 Dinamikus abroncsmodell ... 202
14Dinamikus kerékforgás [10] 204 14.1 Meghajtó nyomatékok ... 204
14.2 Fékező nyomaték ... 205
15A teljes modell [10] 207 15.1 Szimulációs eredmények ... 209
15.2 Animációk ... 211
15.3 Videók... 211
16Irodalomjegyzék 212 A Matematikai alapok 217 A.1 Mátrixszámítások ... 217
A.1.1 Mátrix műveletek ... 219
A.1.2 Determináns ... 224
A.1.3 Normák ... 225
B Feladatlapok 227
C Gyakorlatok 242
Ábrajegyzék
1.1 ábra: Több tudományterület rendszer leírása [1]. ... 7
1.2 ábra: ABS-mágnesszelep, csatlakozások. ... 8
1.3 ábra: Fent: Fúrókalapács [2]; Lent: A fúrókalapács szimulációs modellje. ... 9
1.4 ábra: A rendszer szemléltetése blokksémán. ... 11
1.5 ábra: Egy járműrendszer (Ammon, 1997). ... 13
1.6 ábra: Két nyomvonalú jármű szabadságfokai [5]. ... 13
1.7 ábra: A rendszer szimuláció alapelve. ... 19
1.8 ábra: A paraméter identifikáció folyamata. ... 21
1.9 ábra: A rendszer optimalizálás folyamata. ... 22
1.10 ábra: Példa hatásvázlatra (egyszerű rezgőrendszer). ... 23
1.11 ábra: Kerékfelfüggesztés egyszerű modellje. ... 23
1.12 ábra: A felfüggesztés hatásvázlata, és a lehetséges részletezési szintek. ... 24
1.13 ábra: Elektromos aluláteresztő szűrő. ... 24
1.14 ábra: Elektromos aluláteresztő szűrő blokkvázlata, lehetséges részletezési szintek. ... 25
1.15 ábra: Jelfolyam-ábra a) felfüggesztés és b) aluláteresztő szűrő. ... 26
2.1 ábra: Matematikai inga. ... 29
2.2 ábra: Rúd longitudinális rezgései. ... 30
2.3 ábra: A longitudinális rezgéseket leíró diszkrét modell. ... 31
2.4 ábra: Koncentrált paraméterű egyszerű rezgőrendszer. ... 32
2.5 ábra: Nemlineáris állapotegyenlet blokkvázlata. ... 34
2.6 ábra: Blokkvázlat: Logisztikus növekedés állandó terméshozamnál. ... 35
2.7 ábra: Egyváltozós skalárfüggvény linearizálása. ... 38
2.8 ábra: Az additivitás blokkvázlata. ... 39
2.9 ábra: Nemlineáris erő karakterisztika (hézaggal kombinálva). ... 40
2.10 ábra: A lineáris állapotegyenletek blokkvázlata. ... 42
3.1 ábra: Nemlineáris, egyszerű inga. ... 48
3.2 ábra: Az állapotegyenleteken alapuló szimuláció. ... 52
3.3 ábra: Objektum-orientált modellezés/szimuláció. ... 52
3.4 ábra: Blokkvázlat. ... 53
3.5 ábra: Különbség mérése (keresztváltozó). ... 53
3.6 ábra: Áramlás mérése (átmenő változó). ... 53
3.7 ábra: Az objektumok összekapcsolása a (“Cut-Set“) hálózati módszerrel. ... 54
3.8 ábra: Matematikai inga. ... 55
3.9 ábra: Grafikus személtetés. ... 56
3.10 ábra: Előjel konvenció. ... 56
3.11 ábra: Ohmikus ellenállás. ... 57
3.12 ábra: Induktív ellenállás. ... 57
3.13 ábra: Kapacitás. ... 58
3.14 ábra: Egyszerű villamos hálózat. ... 58
3.15 ábra: Rugó. ... 60
3.16 ábra: Multi-port rugó modell. ... 61
3.17 ábra: Tömeg... 61
3.18 ábra: Multi-port tömeg modell ... 61
3.19 ábra: Rugó-tömeg rendszer. ... 62
3.20 ábra: Multi-port. ... 63
4.1 ábra: Egyenletmegoldás logisztikus növekedésre (kvalitatív). ... 68
4.2 ábra: A matematikai inga fázisgörbéje. ... 69
5.1 ábra: Csökkenő viselkedés negatíve valós sajátértékkel. ... 82
5.2 ábra: Csökkenő viselkedés komplex sajátértéknél. ... 83
5.3 ábra: Lineáris rendszerek viselkedése a sajátértékek komplex síkon való helyzetének függvényében. ... 84
5.4 ábra: Negyed autó. ... 84
5.5 ábra: A negyed autó sajátértékei 1500 Ns/m ≤ dA ≤ 6500 Ns/m csillapításnál. ... 87
7.1 ábra: Explicit Euler módszer. ... 99
7.2 ábra: Az explicit Euler módszer alkalmazása. ... 101
7.3 ábra: Explicit Euler módszer; instabilitás. ... 101
7.4 ábra: Az Euler módszer stabilitási tartománya. ... 103
7.5 ábra: A trapézszabály származtatása. ... 104
7.6 ábra: Stabilitási tartomány a fixpont iteráció után. ... 106
7.7 ábra: Az Implicit Euler módszer. ... 108
7.8 ábra: A 4-ed rendű Runga-Kutta módszer instabilitási tartománya. ... 114
7.9 ábra: A Runge-Kutta módszer átmeneti pontjai... 115
7.10 ábra: Az 1≤ ≤p 4 rendű Runge-Kutta módszerek stabilitási tartományai. ... 117
7.11 ábra: A lépésválasztás szabályozási feladatnak megfelelő hatásvázlata... 120
7.12 ábra: Egy tömegű inga integrálása az explicit Euler módszerrel. ... 130
7.13 ábra: Egytömegű rezgőrendszer integrálása implicit Euler módszerrel. ... 133
7.14 ábra: A rezgés energiájának változása. ... 134
7.15 ábra: A(0)-stabilitás. ... 135
8.1 ábra: Pattogó labda. ... 139
8.2 ábra: Pattogó Labda (szimulációs eredmény). ... 140
9.1 ábra: Síkbeli négycsuklós mechanizmus. ... 147
9.2 ábra: A négy csuklós mechanizmus megoldásai... 148
9.3 ábra: Öt lengőkaros kerékfelfüggesztés. ... 148
9.4 ábra: Az ötpontos kerékfelfüggesztés vektorai. ... 150
9.5 ábra: Az ötpontos valós kerékfelfüggesztés kerékközéppontjának trajektóriája. ... 150
9.6 ábra: Konvergens fixpont iteráció; gradiens a fixpontban. ... 152
9.7 ábra: Divergens fixpont iteráció ... 153
9.8 ábra: Newton-Raphson iterációs lépések... 154
10.1 ábra: Paraméterek által meghatározott rendszer. ... 156
10.2 ábra: Célrendszer... 159
10.3 ábra: A pszeudóinverz geometriai illusztrációja. ... 160
10.4 ábra: Szimulátor modell ... 160
10.5 ábra: Az y(t) beolvasása ... 161
11.1 ábra: Példák többtest rendszer elemeire. ... 171
11.2 ábra: A részekre bontás módszere a mechanikában. ... 172
11.3 ábra: Példák kényszerekre. ... 173
11.4 ábra: Gömbi inga. ... 175
11.5 ábra: Virtuális elmozdulás. ... 175
11.6 ábra: A z tengely körüli forgatással nyert koordináta transzformáció. ... 178
11.7 ábra: Kettős inga. ... 184
13.1 ábra: Nemlineáris egynyomvonalú modell (bicikli modell), felülnézet ... 198
13.2 ábra: Nemlineáris egynyomvonalú modell, oldalnézet ... 198
14.1 ábra: Dinamikus kerékforgás. ... 204
14.2 ábra: Motor karakterisztika. ... 205
14.3 ábra: Fékező nyomaték karakterisztika. ... 206
15.1 ábra: Nemlineáris egynyomvonalú modell: különböző, ugrásszerűen beállított kormánykerék
állásoknál ... 210
B.1 ábra: Fúrókalapács [2] ... 227
B.2 ábra: Matematikai inga ... 231
B.3 ábra: Módosított inga... 232
B.4 ára: Prizmatikus rúd. ... 233
B.5 ábra: Kettősinga és a szétszedett inga elem ... 237
B.6 ábra: Ötlengőkaros hátsó kerékfelfüggesztés ... 241
Táblázatok
1.1 táblázat: Példák a különböző tudományterületeken előforduló állapotváltozókra. ... 121.2 táblázat: Példák különböző szakterületek rendszerelemeire. ... 14
3.1 táblázat: A keresztváltozók és az átmenő változók osztályozása az egyes tudományterületeken. 53 7.1 táblázat: Az átmeneti értékek száma és az elért rend. ... 116
7.2 táblázat: α nyílásszögek különböző kértékekre ... 135
1 Bevezetés
Ez a tananyag a modellezési módszerek leírását tartalmazza és a komplex dinamikai rendszerek tulajdonságainak megértését célozza hatékony alkalmazásuk érdekében.
Következésképp megfelelő mélységben kell megismernünk a mechatronikai rendszerek, alrendszereik és elemeik elemzésének, valamint vizsgálatának módszereit és alkalmazásukat.
Ez a tananyag az alábbi témákkal foglalkozik:
• dinamikai rendszerek matematikai megfogalmazásával,
• modellezési technikákkal,
• szimulációval,
• differenciál egyenletek integrálási és nemlineáris egyenletek megoldási módszereivel,
• a rendszerparaméterek meghatározásával (identifikációjával) illetve becslésével,
• a dinamikai rendszerek stabilitási tulajdonságaival.
Ebben az értelemben fontos hangsúlyoznunk, hogy a vizsgált rendszerek nem csupán egyetlen tudomány keretébe tartoznak, hanem leírásukhoz több tudományterületet ötvözve kell alkalmazni (lásd 1.1 ábra)
1.1 ábra: Több tudományterület rendszer leírása [1].
1.1 Bevezető példák
Az alábbi példák az előadáson ennél részletesebben kerülhetnek ismertetésre.
1.1. példa: ABS – Mágnesszelep, 1.2 ábra Rendszer: ABS
Alrendszer (komponensek, alkatrészek): mágnesszelep Lehetséges célok:
a) Az armatúra x t
( )
elmozdulás-időfüggvényének leírása működés közben.b) Hol és hogyan lehet befolyásolni a dinamikai viselkedést (pl.: a teljes út 90 %-ának gyorsabb megtételéhez)?
c) Milyen más nem dinamikai természetű célkitűzések lehetségesek ebben az összefüggésben?
d) Milyen más lehetőségek létezhetnek a dinamikai rendszerek pozitív módon való befolyásolására (mit jelent a "pozitív" jelző ebben a szövegkörnyezetben?)?
Az ABS felépítése különböző mérnöki tudományokat foglal magában, pl.:
• mechanika (fék mechanizmusa, hajtás dinamikája),
• hidraulika (szelepek, szivattyúk, csövek, ...),
• elektrotechnika (vezérlés, teljesítményelektronika, …),
• irányítástechnika (ABS-algoritmus).
1.2 ábra: ABS-mágnesszelep, csatlakozások.
1.2. példa: Fúrókalapács, 1.3 ábra Rendszer: fúrókalapács
Alrendszer (komponens): forgattyús mechanizmus Lehetséges célok:
a) Az ütés impulzusának maximalizálása.
b) A szerszámfogantyú rezgésének minimalizálása az ütési teljesítmény állandó szinten tartása mellett.
c) Hogyan kell a forgattyús mechanizmus elemeit megtervezni a hatékony fúrás érdekében?
d) Felléphet-e törés a forgattyús mechanizmus elemeire ható nagy dinamikai terhelések következtében?
1.3 ábra: Fent: Fúrókalapács [2]; Lent: A fúrókalapács szimulációs modellje.
⇒ 1. feladatlap: A fúrókalapács egyszerű szimulációs modellje
1.2 A dinamikai rendszer
A rendszer kifejezés hétköznapi értelemben is gyakran alkalmazott fogalom pl. közlekedési rendszer, naprendszer, számítógéprendszer, szív és érrendszer, idegrendszer, stb.
Jelen szövegkörnyezet a mérnöki és tudományos területeken a rendszer kifejezést komplex és nem átlátható műveletek és folyamatokkal összefüggésben alkalmazza. A mechatronikában általában a különböző tudományterületek együttműködése figyelhető meg.
1.2.1 Definíciók
1.1. definíció [3]:
A rendszer elemek (alkatrészek, komponensek, objektumok) halmaza,
• amelyek egymásra kölcsönösen hatnak (kölcsönhatás),
• amelyek külső hatásoknak (input) vannak kitéve és
• amelyek kifelé (output) is hatnak.
1.1. Megjegyzés:
A tudomány a rendszer fogalomra többféle definíciót is megfogalmaz, pl.:
1.2. definíció [4]:
Egy objektum mindaddig rendszerként azonosítható, amíg minden egyes részeleme és minden sajátossága az egymástól való kölcsönös függésükkel (rendszer környezetével is) valamilyen logikai értelemben egy nagyobb egésznek a komponenseiként tekinthetők. Ehhez jönnek az axiómák.
Elemek lehetnek pl. építőelemek, alkatrészek, komponensek, objektumok, részek.
A jellemző sajátosságok lehetnek tulajdonságok, ismertetőjelek és a rendszer, valamint környezete közötti kapcsolatok. A rendszer állapotát leíró jelek a rendszer állapotváltozói.
1.3. definíció [4]:
A rendszer egymásra ható képződmények elhatárolt rendezettsége. Ezt a rendezettséget egy határfelület vagy perem határolja (környezettel kapcsolatban lévő rendszerelemek egy
halmaza). A burkolat a rendszert elhatárolja a hozzá kapcsolódó környezetétől. Ezen a kapcsolaton átvitt tulajdonságok és állapotok azok a mennyiségek, amelyek közötti összefüggések leírják a rendszer sajátos viselkedését.
A rendszert szimbolikusan egy blokkal szemléltetjük. A blokk pereme a határfelület, amely a környezetétől való elhatárolást szimbolizálja.
1.4 ábra: A rendszer szemléltetése blokksémán.
A blokk kapcsolata a környezettel, adott esetben, lehet
• r számú ui bemenő (input) mennyiség,
• m számú yi kimenő (output) mennyiség és
• q számú zi zavaró mennyiség.
Ha a rendszernek nincs kapcsolata a környezettel, akkor zárt rendszerről beszélünk. A rendszer teljes állapotát n számú xi állapotváltozóval írjuk le.
1.4. definíció:
Állapotváltozóknak nevezzük a rendszer azon változóit, amelyek ismerete elegendő ahhoz, hogy a rendszer viselkedését teljes mértékben leírjuk. Az állapotváltozók az idő függvényei.
Értékük összessége a rendszer állapotát írja le.
1.2. Megjegyzések:
• Az állapotváltozók a rendszer belső változói.
• Az állapotváltozók megválasztása többféle is lehet. A választott állapotváltozóknak egyértelműeknek, függetleneknek és redundáns menteseknek kell lenniük. Az utóbbi tulajdonságból következik, hogy az állapotváltozók megválasztása teljesen tetszőleges lehet, azonban számuk egyértelműen rögzített.
• A gyakorlati alkalmazásoknál nem minden állapotváltozó érdekes, hanem csak a mindenkori alkalmazás szempontjából szükséges változók. Ezeket a változókat nevezzük kimeneti (output) változóknak, amelyek az állapotváltozók kombinációjából is képezhetők.
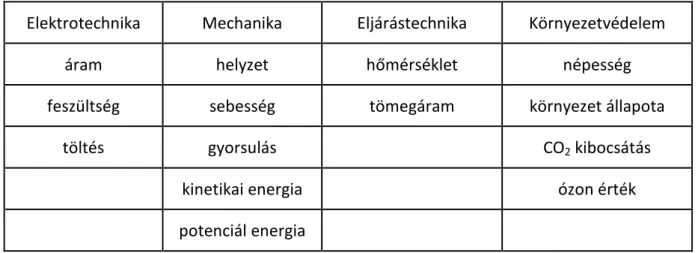
Az 1.1 táblázat példákat tartalmaz a különböző tudományterületekről származó állapotváltozókra.
1.1 táblázat: Példák a különböző tudományterületeken előforduló állapotváltozókra.
1.3. példa: Járműrendszer
Egy járműrendszeren, a vezető által meghatározott mennyiségek, mint pl. kormánykerék szöge, fékpedál és a gázpedál állásai, jelentik a rendszer bemenő jeleit (inputs). A jármű mozgását leíró változókat állapotváltozóknak nevezzük. Ezen változók kombinációit, illetve részhalmazait kimenő jeleknek (outputs) nevezzük, és az útról átadódó hatásokat pedig zavaró jeleknek nevezzük (lásd 1.5 ábra).
Elektrotechnika Mechanika Eljárástechnika Környezetvédelem
áram helyzet hőmérséklet népesség
feszültség sebesség tömegáram környezet állapota
töltés gyorsulás CO2 kibocsátás
kinetikai energia ózon érték
potenciál energia
1.5 ábra: Egy járműrendszer (Ammon, 1997).
Egy járműdinamikai rendszer példáját mutatja az 1.6 ábra.
1.6 ábra: Két nyomvonalú jármű szabadságfokai [5].
1.4. példa: Rácsos szerkezet
Egy rácsos szerkezet egyes rúdjai képezik a rendszer elemeit. A rudak között fellépő belső kölcsönhatások a csomóponti erők. Bemenő mennyiségek a külső terhelések, és kimenő mennyiségekként a kényszerekben fellépő kényszererőket érthetjük
1.5. példa: Az utak forgalmi rendszere
Rendszerelemként felfoghatók az elhatárolt utcai- és alhálózatban közlekedő egyes járművek. Alrendszereket képezhetnek a mindenkori járműjükkel közlekedő vezetők. A belső kölcsönhatások a jármű relatív távolságainak és sebességeinek felelnek meg.
1.5. definíció:
A több mint egy bemenő és több mint egy kimenő mennyiséggel rendelkező rendszert többváltozós rendszernek, azaz “MIMO” (multiple-input- multiple-output) rendszernek nevezzük.
Az 1.2 táblázat különböző szakterületek rendszerelemeit tartalmazza.
1.2 táblázat: Példák különböző szakterületek rendszerelemeire.
A rendszerelemek közötti kölcsönhatások jellege meghatározza rendszer szerkezetét. A rendszer alrendszerekre (komponensekre) bonthatók.
Egy rendszert alrendszerekké (komponensekké, összetevőkké, alkotórészekké) lehet felosztani és strukturálni. Egy folyamat alrendszerekké történő bontása azzal az előnnyel jár, hogy a rendszer viselkedéséről jobb áttekintést kapunk és hogy az egyes alrendszereket különböző emberek építhetik fel. A strukturálást úgy kell megvalósítani, hogy az alrendszerek a teljes rendszerbe beilleszthetők legyenek. Az illesztési felületek világos meghatározása alapvető, és ez jelenti az egyik fő problémát a komplex dinamikai rendszereknél.
A rendszer határa (pereme) tetszőlegesen kijelölhető. De általában ott húzunk határokat, ahol néhány egyértelműen meghatározott kapcsolattal a környezettől való elhatárolás világos és a rendszer nem hat vissza a környezetére.
Elektrotechnika Mechanika Eljárástechnika Népesség alakulása
ellenállás tömeg tartály születés
kapacitás rugó szelep halál
vezeték csillapítás csővezeték betegség
tranzisztor rúd keverőüst fogyasztás
erősítő csapágy szűrő
szűrő vezeték reaktor
végállás helyzet aktuátor
erő aktuátor
1.6. definíció:
A dinamikai rendszerek mozgása alatt a rendszer változóinak időbeli megváltozását értjük.
Ezért a mechanikai mozgás (helyváltoztatás) a mozgások összes általános típusainak egy speciális esete.
A már leírt mozgások mellett, az irodalomban (lásd [6]), további mozgások is előfordulnak.
A rendszerparaméterek olyan mennyiségek, amelyek állandók maradnak a rendszer megfigyelése során. Erre vonatkozó példák a természeti állandók, rugóállandók és csillapítási tényezők, ellenállások, stb.
A környezeti hatások olyan mennyiségek, amelyek a rendszerre kívülről hatnak, de amelyre a rendszer nincs visszahatással (visszahatás mentesség). Erre vonatkozó példák a nagy termek hőmérsékleti változása, a kényszermozgások, stb.
Az állapotváltozók kezdeti értékei.
A sebesség az állapotváltozók megváltozásának mértéke, amely az állapotváltozó értékének megváltozása egységnyi idő alatt. Példák erre a sebesség, a gyorsulás, a népesség születési és halálozási rátája, a tömegáram és a nyomásváltozás, stb. Mint ahogy a sebesség példája mutatja, az állapotváltozók egyaránt lehetnek az állapotváltozók változási sebességei és az állapotváltozók önmaguk. Ez elsősorban a mechanikában bír jelentőséggel.
A matematikában a dinamikai rendszereket differenciálegyenletek (DE), n-ed rendű algebrai egyenletek és differenciál-algebrai egyenletek (DAE) írják le (lásd a 3. fejezetet).
1.2.2 A rendszerek osztályozása
1.7. definíció:
Egy rendszer
• statikus, ha a rendszer állapota a rendszer határán (peremén) belül nem változik a megfigyelés alatt. A statikus rendszer modellje algebrai egyenletekből áll.
• dinamikus, ha az x t
( )
1 pillanatnyi állapot határozottan függ az x t( )
0 kezdeti állapotától és az u t( )
input mennyiségtől a[ ]
t t0,1 időintervallum alatt(
t1>t0)
. A dinamikai rendszerek mindig tartalmaznak tároló elemeket, mint pl. energia, anyag, információ, stb. A dinamikai elemek viselkedéseit ezért differenciálegyenletekkel vagy differenciál-algebrai egyenletekkel írjuk le.• koncentrált paraméterű rendszernek nevezzük, ha a rendszerváltozók, úgy, mint tömegek, kapacitások, rugók, csillapítók, stb., azaz, ha a rendszer változói a helynek nem függvényei (pl.: rugó-tömeg-inga). A dinamikában az ilyen rendszereket közönséges differenciálegyenletekkel írják le. Ha ez az egyszerűsítés nem megengedett, (ha pl. a helytől való függést figyelembe kell venni) megosztott paraméterű rendszerről beszélünk. Ebben az esetben a rendszer leírása parciális differenciálegyenlettel történik (pl.: rúd rezgése).
• időinvariáns, ha a paraméterei időben állandóak maradnak. Ha a paraméterek változnak az időben, akkor idővariáns rendszerről beszélünk (pl.: a rakéta, amelynek a tömege az üzemanyagfogyásával megváltozik, vagy olyan műanyag alkatrészek, amelyek rugalmassági együtthatója csökken a hőmérséklet emelkedésével).
• kauzális, ha a kimeneti jele egy tetszőleges időpontban csak a bemeneti jel értékétől függ az adott és az ezt megelőző időpontban (kauzalitás elve = ok és okozat elve).
Tananyagunk kizárólag a kauzális rendszerekkel foglalkozik.
• determinisztikus, ha matematikai egyenletek alapján elvileg egzakt módon kiszámítható a rendszer viselkedése. Ha a rendszer viselkedése csak valószínűség- számítással és statisztikai módszerrel jósolható meg előre, akkor sztochasztikus rendszerről beszélünk.
Ebben a tananyagban (elsősorban a technikai) rendszerek dinamikai viselkedését vizsgáljuk.
Ezért a dinamika fogalmát is meg kell magyaráznunk. Történelmileg tekintve dinamika alatt (gör. dynamis = erő) elsősorban a mechanikai rendszerekre ható erőhatások okozta mozgásváltozások tanát értették és megfordítva (inverz dinamika). Ma már dinamika alatt általában az időbeli változások és ennek során fellépő jelenségek leírását és vizsgálatát értjük, valamint azt, hogy hogyan zajlanak le az általános gerjesztések és események (erők, feszültségek, halálozások, születések, tömegáram, stb.) hatása következtében. Valójában a dinamika mozgást, változást jelent.
1.3 Rendszermodellek
A modell a valóság leegyszerűsített mása azért, hogy bizonyos funkciókat elemezni tudjunk.
Nincsen olyan modell, amely a valóság hű másolata lenne. Ugyanis mindig van eltérés a valós rendszer viselkedése és annak modellje között. Ezt az eltérést modellezési hibának nevezzük.
1.3.1 Modelltípusok
A különböző vizsgálatokhoz, különösen a különböző részletesség esetén, különböző modellek szükségesek:
• kisminta modellek: kicsinyített jármű- vagy repülőgép modellek a szélcsatornában végzett kísérletekhez,
• koncepcionális modellek, tisztán elvi modellek,
• matematikai-fizikai modellek.
Ebben a tananyagban, a továbbiakban kizárólag a matematikai-fizikai modellekkel foglalkozunk.
1.6. példa:
• Járművek, repülőgépek vagy hajók mérethűen kicsinyített modelljei a szél- és vízcsatornában végzett aero- és fluid dinamikai tulajdonságok mérésére. Ennek során az áramlástechnikai hasonlósági törvényeket használjuk: hasonló Reynolds-szám esetén a térfogatáram hasonló, még akkor is, ha az áramló közeg léptéke eltérő.
• Analóg számítási modellek, amelyekben az elektronikus kapcsolás a vizsgált rendszer modelljéül szolgál. Ez az eljárás a mechanikai és elektromos rendszerek közötti hasonlóságon alapszik, pl.: egy csillapított rezgő rendszer differenciálegyenlete
( ) mx+dx+cx=F t ,
ahol x az elmozdulás, m a tömeg, d a csillapítási tényező, c a rúgó merevsége és ( )
F t a gerjesztő erő. Ha a kondenzátorban tárolt q töltést az xelmozdulással, az L induktivitást az m tömeggel, az R ellenállást a d csillapítási tényezővel, a C kapacitást az 1 c rugómerevség reciprokjával és az U t
( )
feszültségforrást az F t( ) gerjesztő erővel azonosítjuk, akkor a következő egyenletet kapjuk:1 ( )
Lq Rq q U t
+ +C =
.
• A „Hardware-in-the-Loop” (HIL, valódi eszköz szimulált környezetben) szimulációban a matematikai modellek a vizsgált rendszer valós alrendszereihez kapcsolódnak, pl.: az elektromos kormányrendszer. Ebben az esetben tulajdonképpen a „fizikai” alkatrészek nem modellek, hanem a vizsgált rendszer egy része.
1.3.2 Rendszerelemzés
A vizsgált rendszer elemzése során megpróbáljuk a rendszer ki– és bemeneti viselkedését meghatározni azért, hogy így megértsük a rendszer viselkedését és adott esetben a befolyásolás lehetőségét kidolgozzuk.
Alapvető, hogy lehessen a rendszer gerjeszteni, miközben a bevitt adatokat tároljuk és a kimenő adatokat pedig mérjük.
Ezek a folyamatok mégis gyakran nehézségeket okoznak, mert
• a vizsgált rendszer számos esetben még egyáltalán nem (új termékek fejlesztése), vagy már nem (baleseti rekonstrukció) létezik,
• a rendszer geometriai méretei vagy túl nagyok vagy túl kicsik a mérések elvégezéséhez,
• a rendszer tulajdonságainak megméréséhez nem állnak rendelkezésre a megfelelő szenzorok vagy túl drágák,
• a megfelelő kísérletek túl sokáig tartanak, mert a rendszer nagyon lassú,
• a vizsgált rendszerekkel végzett kísérletek túl veszélyesek, nagyon drágák vagy más okokból kifolyólag nem helyettesíthetők (úttartási tesztek, ütközési tesztek, biomechanika),
• a rendszerből egy példány van és egyáltalán nem szabad vagy nem lehet gerjeszteni (gazdasági rendszerek, biológia, időjárás, …).
1.3.3 Rendszer szimuláció
Számos esetben, az 1.3.2 pont alatt bemutatott eljárást nem alkalmazzuk az éppen vizsgált rendszerre (legalábbis nem a fent említett megfontolások alapján, vagy más gyakorlati okokból). Helyette, egy alkalmas modellt választunk.
Azt az eljárást, szintén rendszer szimulációnak nevezzük, amelyben a kísérleteket de facto nem a valós rendszereken, hanem a rendszermodelleken folytatjuk le. Az 1.7 ábra egy alapvető sémát szemléltet az ilyen rendszeranalízis lefolytatására:
1.7 ábra: A rendszer szimuláció alapelve.
A szimulációs eljárás általában a valós rendszer helyett a dinamikai rendszer matematikai modelljei alapján folytatott kísérleteket jelent.
A szimuláció számos előnnyel rendelkezik, mint pl.
• elmélyíthető a rendszer működésének a megértése,
• sok esetben a rendszer szimuláció lényegesen gyorsabb és olcsóbb, mint a kísérletek lefolytatása és kiértékelése,
• a szimulációk könnyen megismételhetők és jól összehasonlíthatók.
A matematikai szimulációs modelleken a kísérletek lefolytatásához, először is, az egyenleteket elő kell állítani és meg kell oldani. Az egyenletek felállításához különböző tudomány-területek alapvető fizikai törvényeire van szükség, pl.
• Euler egyenletek és Newton törvényei,
• az energia megmaradásának törvénye,
• az anyagtörvény,
• d’ Alembert elve,
• a Maxwell egyenletek
• Navier-Stokes egyenletek
Ezt a témát mechanikai rendszerek vonatkozásában a 11-15. fejezetek tárgyalják. Az egyenletrendszerek megoldásával 4-9. fejezetek foglalkoznak.
Egy szimulációs rendszer kidolgozásához (amely az egyenletek levezetését és megoldását jelenti), a modell alapvető egyszerűsítéseket követel meg, mint pl.:
• rugalmas és megoszló tömegű testek helyettesítése merev és koncentrált tömegű testekkel (tömeg és tehetetlenségi nyomaték),
• a nemlineáris anyagtörvények helyettesítése lineárisokkal,
• egyszerű lineáris kinematikai összefüggések alkalmazása nemlineárisak helyett,
• a súrlódás hatásának elhanyagolása vagy teljes leegyszerűsítése.
1.3.4 Rendszeridentifikáció (lásd 10. fejezet)
Rendszeridentifikáció (vagy a rendszer paramétereinek azonosítása) alatt a rendszer paraméterinek szisztematikus, számítógéppel segített közelítő meghatározását értjük (lásd 1.8 ábra).
A megfelelő rendszermodell és a vizsgált rendszer bemenő és kimenő adatainak mérése az eljárás előfeltétele. A következőkben fizikai törvényeken alapuló fizikai modellel fogunk meghatározni egy rendszer modellt. Bonyolult kérdéseket magába foglaló helyzetekben (pl.
az utastérbeli áramlási viszonyok leírása a klíma vezérlés értelmezése céljából) gyakran más leírásokat alkalmazunk, pl. neurális hálózatokat, amelyek eltekintenek a fizikai szemlélettől.
Mérések alapján az ismeretlen
[
p p1, 2, ,pn]
T=
p
paramétereket oly módon változtatjuk, hogy a valós rendszer és a modell között a legjobb legyen az egyezés. Megfelelő matematikai optimalizálási módszereket alkalmazunk az ismeretlen paraméterek azonosítására (lásd 10. fejezet).
Ezt a módszert különösen akkor alkalmazzuk, amikor a paraméterek nehezen mérhetők, pl.
• súrlódási tényezők és anyagcsillapítás,
• hőátadási tényezők,
• áramlási ellenállás, stb.
A további fizikai mennyiségeket, mint a tömeget, rugómerevséget, geometriai méreteket, anyagtulajdonságokat (rugalmassági modulust, viszkozitást, stb.) táblázatokból, prospektusokból, CAD rajzokból és modellekből vesszük ki.
Általában a paramétereket, ha csak lehet, közvetlenül mérjük, a többit pedig paraméter identifikálással határozzuk meg.
A paraméter identifikáció alkalmazásának sikere csak korlátozott mértékű lehet. A legtöbb esetben a siker a választott modell jóságától és a mérés minőségétől függ.
1.8 ábra: A paraméter identifikáció folyamata.
1.3.5 Rendszeroptimalizálás (lásd 10. fejezet)
A rendszeroptimalizálás egy tervezett új tulajdonságú rendszer létrehozását célozza rögzített elvárásokra való optimalizálással (lásd 1.9 ábra).
A matematikai modellt úgy paraméterezzük, hogy az határozottan elégítse ki a megcélzott viselkedés kritériumait. A megcélzott viselkedést, adott bemeneti és kimeneti jelekre vonatkozó célmegoldásokkal írjuk le.
Az eltéréseket, a modell pillanatnyi és a megcélzott viselkedése között, teszt jelekkel történő szimulációval határozzuk meg. A megvalósulás mértékének függvényét a pillanatnyi megoldás és a célmegoldás közötti különbséggel definiáljuk, amelyet szintén célfüggvényként azonosítunk.
Valójában hasonlóságokat figyelhetünk meg a rendszeridentifikáció és a paraméter identifikáció folyamatai között. Mind a kettő a p paraméter halmaz meghatározását célozza, amely garantálja a közelítő egyenértékűségét az yact pillanatnyi jellemzőknek az ymeas mért értékekkel (paraméter identifikáció) és az ydes elérendő értékekkel (rendszeroptimalizálás).
A rendszeroptimalizálás folyamatát az 10. fejezet tárgyalja.
1.9 ábra: A rendszer optimalizálás folyamata.
1.3.6 Modell sémák és blokkvázlatok
A modell sémák a rendszerek részletes leírásai, amelyek erősen támaszkodnak az ábrázolásra. A modell szemléltetésének módja az adott feladat és a megfelelő mérnöki tudomány közötti kapcsolattól függ. A több tudomány integrációja (“mechatronika”) növekvő fontossága megköveteli, hogy ezeket a sémákat (szerkezeti-, működési-, hatásvázlatokat), ha lehetséges univerzális diagramokkal (pl. blokkvázlatokkal) helyettesítsük. Azonban, komoly nehézségekkel kell szembenéznünk, ha egy komplex rendszerrel (pl. ha feladat mechatronikai területről származik) van dolgunk.
A blokkvázlatok (tömbvázlatok) a modell egyenleteket látványosan írják le. Ez következésképp azt jelenti, hogy két mennyiség (jel) közötti kapcsolat allegorikus formában kerül szemléltetésre.
A következő hozzárendelések alapvetőek:
• jel ↔ a nyíl a hatás iránya
• művelet ↔ tömb vagy blokk
Egy blokkvázlat a következőket tartalmazza:
• a tömböket (blokkokat),
• irányított nyilakat (hatásvonalakat), a tömb kimenő és érkező jeleit reprezentálva. A nyíl hegye a hatás irányába mutat, jelezve, hogy ki- vagy bemenő jelről van-e szó,
• a ki- és bemenő mennyiségek jeleit,
• az összegzéseket, amelyeket kis körök szemléltetnek,
• a jelek elágazásait (fekete pontok).
A blokkvázlat szerkezetének és elemeinek a további részleteit a DIN19226 szabvány [7]
foglalja össze.
1.10 ábra: Példa hatásvázlatra (egyszerű rezgőrendszer).
Különösen az irányítástechnika elméletében elterjedt a blokkvázlatok (hatásvázlatok) alkalmazása. A szimulációs programok támogatják a blokkvázlatok grafikus bevitelét. A program a rendszeregyenleteket a diagram alapján automatikusan építi fel (lásd 1.10 ábra).
A blokkvázlatok hierarchikusan is felépíthetők.
1.7. példa: Kerékfelfüggesztés, 1.11 ábra
1.11 ábra: Kerékfelfüggesztés egyszerű modellje.
Modellegyenletek
Newton-féle egyenlet (impulzus tétel) a fizikai felépítményre, ahol l0 a rugó terheletlen hossza:
(
0) ( )
A A
m y= −c y− −s l −d y − −s m g,
( )
0 0
( )
1
A A A
A h t
m y dy cy cs ds cl m g y h m g dy cy cl
+ + = + + − ⇒ = m − − − +
.
Az s=0 egyensúlyi feltétel értelmében kapjuk:
0 0 0
0 A mA
cy cl m g y l g
= − + − ⇒ = − c .
Bevezetve az új modellváltozót
0 0
A A
y y y y l m g
= − = − + c , megkapjuk a lineáris mozgásegyenletet
( )
1
A A A
A
y h dy cy
= m − −
,
és ez alapján megszerkesztett hatásvázlatot az 1.12 ábra mutatja.
1.12 ábra: A felfüggesztés hatásvázlata, és a lehetséges részletezési szintek.
1.8. példa: Villamos áramkör, 1.13 ábra
1.13 ábra: Elektromos aluláteresztő szűrő.
Modellegyenletek
Kirchhoff-féle hurok törvény:
∑
u ti( )
= ⇒0 u t1( )
−Ri t( )
−u t2( )
=0 Kapacitás: 2( ) ( ) ( )
0
1 1 t
u t q t i t dt
C C
= =
∫
Az áram és töltés közötti összefüggés: q t
( ) ( )
=i t . Eredményül kapjuk, hogy:( )
11 1
q t q u
RC R
+ =
, 2
( )
u t 1 q
=C ,
végül 2 2 1 2
(
1 2)
1 1 1
Cu u u u u u
R R RC
+ = ⇒ = −
.
Hatásvázlat (Blokkvázlat)
1.14 ábra: Elektromos aluláteresztő szűrő blokkvázlata, lehetséges részletezési szintek.
Jelfolyam-ábrákat elsősorban az angolszász országokban kedvelik. Nagyon egyszerű szerkezetűek és könnyen megrajzolhatók. A hátrányuk abban áll, hogy alkalmazásuk alapvetően lineáris rendszerekre korlátozódik.
A jelfolyam-ábra elemei:
• összekötések előjeles erősítési tényezővel
• a kapcsolódási pontok reprezentálása rendszerváltozókkal
1.15 ábra: Jelfolyam-ábra a) felfüggesztés és b) aluláteresztő szűrő.
⇒2. feladatlap: Matematikai inga
1.4 A rendszerdinamika feladata
Feladat 1: Modellezés
A rendszer viselkedését leíró matematikai összefüggések levezetése: A modellezés mindig együtt jár absztrakcióval és idealizálással.
Példák: tömegpont, merev test, súlytalan rugó időkésés mentes pozicionáló hajtás, stb.
Az adott feladattól függően, ugyanazon rendszer, különböző modellezési részletességet követel meg és éppen ezért különböző idealizálást is.
1.9. példa: Járműmodell
• Hajtásdinamikai elemzés: Komplex többtest rendszer (szabadságfok, pl., hossztengely körüli dőlési szögelfordulás, keresztirányú tengely körüli bólintási szögelfordulás, függőleges tengely körüli legyezési szögelfordulás, x− − −,y ,z irányú elmozdulások). A hajtásláncot és vele együtt a hosszirányú (longitudinális) dinamikát elhanyagoljuk (helyettesítve a jármű meglévő, hosszirányú mozgásával).
• A rángatózás elemzése: Merev test (szerkezet) négy kerékkel, a felfüggesztést elhanyagoljuk, de a hajtásláncot részletesen leírjuk.
• Jármű szimuláció: Az egész jármű részletes dinamikai modellje.
• Ütközési szimuláció: Az autó karosszéria és a teherviselő alkatrészek részletes végeselem modellje.
Feladat 2: Modellkutatás
A rendszer tulajdonságaira vonatkozó kutatás
Példák: stabilitási-, válaszidő-, működési vizsgálat, stb.
Feladat 3: Vezérlő jelek tervezése
A rendszer bemenő jeleit úgy kell megtervezni, hogy elérjük a célrendszer megkívánt tulajdonságait.
Példák:
• A helyes hegesztési pontok kijelölése érdekében, a hegesztő robotok motoráramait szabályozni szükséges.
• A fúrókalapács elegendő nagyságú impulzusának elérése céljából, a lökő dugattyút mozgásba kell hozni.
Feladat 4: Rendszerviselkedés szimulációja
Kísérletek lefolytatása a valóságban gyakran számos okból lehetetlen (pl. járműkonstrukció esetén nincs prototípus, nagyfokú veszélyhelyzet (ütközési teszt, lehetséges környezeti kár), vagy hosszú időtartam (népességváltozás)).
1.5 Összefoglalás
A modellezés és szimuláció során tárgyalt rendszerek eredetileg különböző területekről származnak.
Műszaki területek:
• mechanika
• elektrotechnika
• hidraulika
• pneumatika
• informatika
• stb.
Nem műszaki területek:
• társadalmi tudományok
• üzleti ügyvitel
• közgazdaságtan
• biológia
• matematika
• meteorológia
• stb.
A rendszerdinamikában, a rendszereket hasonló módszerekkel és egységes kritériumokkal fogjuk elemezni.
Következmények:
• A rendszerdinamika egy interdiszciplináris tudomány.
• A különböző tudományok rendszerei közötti hasonlóságokat kihasználva egységesített elemzési technikákat alkalmazunk a vizsgálatokra.
• A különböző tudomány területekről származó egységesített rendszerekre előnybe részesítjük az általánosított leírási technikákat.
• De: Az idők során a különböző tudományterületek (pl. mechanika, elektrotechnika) kidolgozták a saját leíró rendszereiket (és szoftver csomagjait), amelyek nem kompatibilisek egymással. Szemléltetésül említjük a mechanikát, amelyet nehéz lenne blokkvázlattal leírni. Ezért a különböző leírási módokat matematikai rendszer szintjén meg kell tartanunk, hogy a rendszereket végül összekapcsolhassuk.
• Szükségünk van egyértelmű és könnyen megtanulható leíró nyelvekre.
• A jelenlegi irányzat szerint a matematikai leírást ábrákkal helyettesítik:
o tömbábrák,
o programok folyamatábrái, o bond-gráfok [8]
o hálózati módszerek (Multiport and Cut Set Method) o stb.
Az alapvető egyenletek és a megoldási formalizmusuk ismerete elengedhetetlen ahhoz, hogy garantáltan és mélyrehatóan megértsük a rendszerelemzés alkalmazásának lehetőségeit és határait.
2 A dinamikai rendszerek matematikai leírása
2.1 Differenciál-egyenletek
A dinamikai rendszerek viselkedésének időbeni függését differenciálegyenletekkel (DE) vagy, még általánosabban, differenciálalgebrai egyenletekkel (DAE) írhatjuk le. A mi megközelítésünk olyan rendszerekre korlátozódik, amelyek csak differenciálegyenletekkel elemezhetők. Azokkal a rendszerekkel, amelyek csak differenciálalgebrai egyenletekkel írhatók le a 3.1 pontban foglalkozunk részletesebben.
2.1. definíció:
Egy közönséges differenciálegyenlet (ODE) egy olyan összefüggés, amelyben szereplő függvény egyváltozós, és ennek a független változó szerinti, ún. közönséges deriváltai lépnek fe.
Koncentrált paraméterű rendszereket (pl. többtest rendszereket) ODE-kkel írjuk le.
2.1. példa: A matematikai inga differenciálegyenlete (mozgásegyenlete), 2.1 ábra
2.1 ábra: Matematikai inga.
A 0 pontra felírt perdülettételből először a következő helyettesítéssel kapjuk:
x1=ϕ,x2 =ϕ,
2 sin ,
ml ϕ= −mgl ϕ (2.1)
2 1
1 2
sin .
g l
x x
x x
= = − x
(2.2)
A (2.1) és (2.2) egyenleteket a mozgásegyenlet minimális reprezentációinak, vagy a rendszer állapotegyenletének is szokás hívni (lásd 2.2 pontot).
2.2. definíció:
Egy parciális differenciálegyenlet egy összefüggés, amely tartalmaz egy két vagy többváltozós függvényt és annak változók szerinti parciális deriváltjait.
A (hely szerint) megoszló paraméterű rendszereket (pl. folytonos mechanikai rendszereket) parciális DE-vel írják le.
2.2. példa: Prizmatikus rúd longitudinális rezgései, 2.2 ábra
2.2 ábra: Rúd longitudinális rezgései.
Mivel a rúd idevágó fizikai paraméterei (merevség, tömeg és adott esetben, ha változik a keresztmetszet) megoszlanak a rúd hossza mentén, parciális differenciálegyenlet szükséges a rendszer dinamikájának a leírására.
A karcsú prizmatikus rúd longitudinális hullámegyenlete az alábbi alakú:
( )
, 2u2( )
,Au x t EA x t
ρ = ∂x
∂ ahol
ρ: a sűrűség,
E: a rugalmassági modulus,
A: a rúd keresztmetszetének területe, L : a rúd hossza,
M =ρAL : az össztömeg.
A u x t
( )
, rúdirányú elmozdulás t idő szerint és x hely szerinti deriváltjai is megjelennek az egyenletben. Az ilyen egyenlet egzakt megoldásával egyelőre nem foglalkozunk.⇒ 3. feladatlap: Prizmatikus rúd longitudinális rezgései 2.1. Megjegyzés:
A megoszló paraméterű rendszert egy megfelelő térbeli diszkretizációval nyert koncentrált paraméterű rendszerrel közelítjük (2.3 ábra). Ebben az esetben a parciális differenciális egyenlet helyett közönséges differenciálegyenleteket kapunk.
2.3 ábra: A longitudinális rezgéseket leíró diszkrét modell.
1 1 2
2 1 2 3
3 2 3 4
4 3 4 5
5 4 5 6
6 5 6
3 ,
2 ,
2 ,
2 ,
2 ,
,
mu cu cu
mu cu cu cu
mu cu cu cu
mu cu cu cu
mu cu cu cu
mu cu cu
= − +
= − +
= − +
= − +
= − +
= −
ahol
6 m= ρAL
és / 6
c AE
= L .
Mátrixos formában a gyorsulásokat kifejezve:
1 1
2 2
3 3
2
4 4
5 5
6 6
3 1 0 0 0 0
1 2 1 0 0 0
0 1 2 1 0 0
36
0 0 1 2 1 0
0 0 0 1 2 1
0 0 0 0 1 1
u u
u u
u E u
u L u
u u
u u
ρ
−
−
−
= = − =
−
−
u Au
,
ahol az A mátrixot szokás a rendszer „merevségi” mátrixának is nevezni.
Ez a tananyag elsősorban a koncentrált paraméterű rendszereket tárgyalja. Az ilyen estekben, a dinamikai rendszerek közönséges differenciálegyenletekkel írhatók le:
( ) ( )
( )( )
( )
Implicit alak: F t y ti , , 'y t ,,yn t =0 , (2.3)
vagy kifejezve y( )n
( )
t -re,( )
( ) ( ( ) ( )
( 1)( ) )
Explicit alak: yn t =Fe t y t, , 'y t ,,yn− t =0 (2.4) 2.2. Megjegyzések:
• Nem minden esetben lehetséges implicit egyenletről áttérni analitikusan az explicit alakra.
• A gyakorlatban vannak olyan rendszerek, amelyek csak kapcsolt differenciál- és algebrai egyenletekkel írhatók le. Erre a több testből álló kinematikai hurkokkal rendelkező rendszerek szolgálnak példával.
• A differenciálegyenlet legmagasabb deriváltjának foka adja a DE rendjét.
• Egy n-ed rendű differenciálegyenlet megoldásához meg kell határoznunk minden folytonosan differenciálható függvényt és a deriváltjait, amelyek kielégítik a DE-et.
• A rendszerdinamikában az ismeretlen y függvény az időtől függ. Az y idő szerinti deriváltjait a következőkben a mennyiség feletti ponttal (y) jelöljük, a felső indexbe jelzett fordított vessző (y') helyett.
(
, , ,) ( )
0F t y y yi =my+dy+cy−P t =
2.3. példa: Csillapított rugó-tömeg rezgőrendszer, 2.4 ábra
(
, ,) ( )
Implicit egyenlet: F t y y yi , =my+dy+cy−P t =0 (2.5)
( ) ( ) ( ( ) )
1
Explicit egyenl t: , 1
e y t Fe t y y, dy cy P t m
= = − + −
. (2.6)
2.4 ábra: Koncentrált paraméterű egyszerű rezgőrendszer.
2.2 Állapotegyenletek
Bevezetve az x1,,xn állapotváltozókat és a következő helyettesítéseket
( 1)
1 , 2 ', n n ,
x = y x = y x = y − (2.7)
a (2.4) egyenlet n db elsőrendű differenciálegyenletre transzformálható.
2.4. példa: Egydimenziós rezgőrendszer
Az egydimenziós rezgőrendszer mozgásegyenlete a v0 csillapítatlan körfrekvenciával, δ Lehr-féle csillapítással és h t
( )
gerjesztéssel a következő alakú:( )
2
2 0
y+ δy+ν y=h t
.
Alkalmazva a következő helyettesítéseket
x1= y, x2 = y,
megkapjuk az elsőrendű DE-rendszert:
1 2
x =x ,
( )
22 2 2 0 1
x =h t − δx −ν x .
Általában célszerű alkalmazni ezt a transzformációt ahhoz, hogy további kutatásokat folytassunk az elsőrendű differenciálegyenlet rendszeren.
2.3. definíció:
Az általános állapotegyenlet egy véges dimenziójú, nemlineáris és az időnek folytonos dinamikai rendszere, n állapotváltozóval és m kimenő mennyiséggel a következő alakú:
állapotegyenlet
( ) ( )
(
, ,)
d t t t
= dtx =
x f x u , (2.8)
mérési, megfigyelési vagy kimeneti egyenlet
( ) ( )
( )
( )t = t , t t,
y g x u , (2.9)
ahol
:n×1
x – állapotvektor, :m×1
y – a kimenő jelek vektora, :n×1
u – a bemenő (vezérlő) jelek vektora, , :
f g rendre n×1, m×1 méretű nemlineáris vektorfüggvények.
2.5 ábra: Nemlineáris állapotegyenlet blokkvázlata.
2.5. példa: Tömegpont
Impulzus tétel: my= F. Helyettesítés: x1= y, x2 = y
Állapotegyenlet: 1 2 1
2 2
, , .
F m
x
x F x
x u m x
= = =
x
2.6. példa: Viszko-csillapítású rugó-tömeg rezgőrendszer, 2.4 ábra Helyettesítés: x1= y, x2 = y, x1= y, x2 =y.
Állapotegyenlet: 12 1
(
1 22( ) )
.
m
x x
cx dx P t x
= = − + − x
Itt, a P t
( )
a gerjesztő erő képviseli az u t( )
vezérlő tényezőt.2.7. példa: Matematikai inga, 2.1 ábra Állapot mennyiségek:
x1 =ϕ (helyzet), x2 =ϕ (sebesség).
Állapotegyenletek:
1 2
x =x ,
2 gsin 1
x x
= − l
.
2.8. példa: Logisztikus növekedés állandó terméshozamnál, [9]
Állapotmennyiség: x (termés, pl. halak) .
Vezérlő tényező: u= =h const (eltávolítás, pl. halászat).
Állapotegyenlet: 1 x , :
x a x h k
k
= − −
kapacitási határ.
2.6 ábra: Blokkvázlat: Logisztikus növekedés állandó terméshozamnál.
2.3. Megjegyzések:
• Az állapotegyenlet nemlinearitását a dinamikai rendszer szerkezete határozza meg, pl.
az állapotváltozók kitevője vagy a nemlineáris karakterisztikák.
• A nemlineáris állapotegyenletek megoldása analitikusan többnyire lehetetlen.
Valamilyen numerikus megoldás válik szükségessé (szimuláció).
⇒ 4. feladatlap: Ragadozó és préda modellek
2.3 Állandósult megoldások és egyensúlyi helyzetek
2.4. definíció:
A dinamikai rendszer x0
( )
t megoldását állandósult (stacionárius) megoldásnak nevezzük, ha az u0( )
t gerjesztésre azt találjuk, hogy( ) ( )
(
0 t , 0 t)
=f x u 0, (2.10)
azaz, x0
( )
t ≡0 és ahol u0( )
t ≡0, x0( )
t a szabad (nem gerjesztett, nem vezérelt) rendszer egyensúlyi helyzete.2.4. Megjegyzés:
Általában a (2.10) egyenlet nemlineáris. A megoldások többnyire numerikus közelítésekből származnak, lásd a 9. fejezetet.
2.9. példa: Tömegpont
( )
2 2 0F m
, , = x = ⇒x =
f x u t 0 és F =0.
Azaz, egy egyensúlyi helyzetet akkor érünk el, ha a gerjesztő erő zérus és a pont az eredeti egyensúlyi helyzetben marad.
2.10. példa: Viszkózus csillapítású rugó-tömeg rezgőrendszer
( )
1(
1 22( ) )
, ,
m
x
cx dx mg P t
=− + − − =
f x u t 0, ahol P t
( )
=02 0 1 mg
x x
⇒ = ⇒ = c . A tömeg az mg
c helyzetet veszi fel a gravitációs erőnek köszönhetően.
2.11. példa: Matematikai inga
( )
21
, , glsin x
x
=− =
f x u t 0
⇒ x2 =0, sinx1=0, azaz x1 =0,kπ (k =1, 2, 3,...
Ez a példa megmutatja, hogy az egyensúlyi helyzetek különböző tulajdonságúak, ha pl.
összevetjük az x1=0 és x1=π egyensúlyi helyzeteket.
2.12. példa: Logisztikus növekedés állandó terméshozamnál Az egyensúlyi helyzetet az alábbiak szerint definiáljuk:
(
, ,)
1 x 0 a 2 0f x u t a x h ax x h
k k
= − − = ⇒ − − =
2 1,2
1 4
2
x k k kh
a
⇒ = ± −
.
Különösen érdekes, ha h=0, akkor ezt kapjuk:
1 0, 2
x = x =k.
2.4 Lineáris állapotegyenletek
Valójában nemlineáris rendszerekkel inkább gyakrabban találkozunk, mint nem. Nem triviális esetektől eltekintve, ez nagy nehézségeket okozhat. Ezért vagyunk érdekeltek abban, hogy nagy erőfeszítésekkel kutatassuk a nemlineáris összefüggések lineárissal való közelítését.
Ilyen módon egy lineáris közelítést kapunk, amely tükrözi az eredeti rendszer viselkedését eltekintve egy bizonyos hibától. De ezek a közelítések elsősorban könnyen kezelhetők és megoldhatók. Általában megfigyelhetjük, hogy a lineáris közelítéssel kapott összefüggések csak bizonyos mértékig érvényesek, a hiba olyan mértékben növekszik, mint amilyen mértékben megsértjük a közelítés érvényességét.
A linearizálás alapelve könnyen leírható egy elegendően sima egy változós f x