KÉPREGISZTRÁCIÓ
BEVEZETÉS, ÁTTEKINTÉS
Tanács Attila
Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem
A tananyag az EFOP-3.5.1-16-2017-00004 pályázat támogatásával készült.
Elektronikus anyagok
• Az előadás anyagához gyakorlati
elektronikus jegyzet és példaprogram gyűjtemény is tartozik
– Gyakorlati jegyzet elérhető az alábbi webcímen
• http://www.inf.u-szeged.hu/~tanacs/kepreg/index.html
– Példaprogram gyűjtemény elérhetősége
• http://www.inf.u-
szeged.hu/~tanacs/kepreg/KepregisztracioGyakPeldatar.zip
• Az előadás anyag legfrissebb változata is
elérető a gyakorlati jegyzet címlapjáról
Képregisztráció
Alapfeladat:
Különböző időpontban/módon készült képek geometriai viszonyának meghatározása.
Elnevezések:
• Képregisztráció (image registration)
– Geometriai viszony meghatározása (transzformáció)
• Képillesztés (image matching)
– Geometriai transzformáció alkalmazása, új kép születik
• Képfúzió (image fusion)
– Új, egyesített kép készítése az átfedő illesztett képekből
Geometriai transzformációk
Ugyanazon objektum geometriailag
különböző megfigyelései.
3D orvosi képek
Vörös színskála: MRI vizsgálat (szövetek) Zöld színskála: PET vizsgálat (agyi működés) Regisztráció nélkül használhatatlan!
3D orvosi képek
Regisztráció eredménye: az egymásnak megfelelő agyi struktúrák és működési információjuk fedésbe kerül.
3D orvosi képek
Képfúzió: a két kép súlyozott összeadásának megjelenítése forró fém színskálán. A magas intenzitású területek fehéres színben
jelennek meg.
Forrás: Vision Research Lab, UCSB https://vision.ece.ucsb.edu/
Képmozaikolás
Forrás: Vision Research Lab, UCSB https://vision.ece.ucsb.edu/
Képmozaikolás
Forrás: Vision Research Lab, UCSB https://vision.ece.ucsb.edu/
Esőerdők területének csökkenése
1992 1994
Forrás: Vision Research Lab, UCSB https://vision.ece.ucsb.edu/
Különböző időpontokban készített légi felvételek elemzéséhez.
Esőerdők területének csökkenése
Forrás: Vision Research Lab, UCSB https://vision.ece.ucsb.edu/
Könnyebb megtalálni, mi változott?
Hatalmas mennyiségű képi adat!
Panorámakép
Forrás: A.A. Goshtasby
Kamerák szűk látómezőjéből
kimaradó részletek kompenzálására.
Több, átfedő képrészlet között
megfeleltetések keresése, és a képek összefűzése.
Panorámakép
Összefűzött eredmény.
Ma már jellemzően az okostelefonok kamera szoftverei is biztosítanak ilyen lehetőséget.
Forrás: A.A. Goshtasby
Regisztráció (Általános)
Cél
Azonos vagy különböző forrásokból származó geometriai információtartalmak egyesítése.
– Képek,
– objektumok 2D, 3D modelljei, – térbeli pozíciók.
Alkalmazások
– Változások detektálása, mérése.
– Kiegészítő képtartalmak egyesítése.
– Fizikai tér és kép koordináta-rendszerek közötti átjárás biztosítása.
Műtéttervezés és végrehajtás
• Modell - Modalitás • Modalitás - Páciens
Forrás: Prostate biopsy project, Johns Hopkins University, Baltimore, MD, USA
Átjárás biztosítása a képi és a műtő fizikai koordináta-rendszerei között. Képi vezérlésű műtét tervezést és végrehajtást biztosít.
Képalkotó berendezések
Digitális 2D, 3D képek Követő, távolságmérő
berendezések Geometriai leírás Fizikai eszközök
Képalkotás
Képjellemzők kinyerése Követés
Mérés
Modell- alkotás
Regisztrációs alapfeladatok
• A bemeneti adathalmaz képi vagy geometriai jellegű lehet.
• 2- vagy 3D digitális képen egy véges méretű digitális rácsot értünk, amely rácspontjaiban találhatók a képpontok. Ezek egy diszkrét, mintavételezett mérési eredményt: színt vagy intenzitásértéket tartalmaznak. Ezek lehetnek hagyományos fotók, vagy 2D/3D orvosi képalkotó technikák.
• A regisztráció előtt egy előfeldolgozási lépésben változtathatunk a képeken, például zajt szűrhetünk, képkiemelő technikákat alkalmazhatunk.
• Geometriai jellegű adatot szolgáltatnak a különböző követő (tracker) eszközök, vagy lézeres távolságmérők.
• Geometriai jellemzőket (pontokat, kontúrokat, felszíneket) kinyerhetünk a digitális képekből is képfeldolgozási módszerekkel,
• valamint ismert felépítésű fizikai eszközök geometriai modelljét is el tudjuk készíteni.
• Ezek alapján többféle regisztrációs feladat felmerül.
Alkalmazási területek
• Számítógépes látás és alakfelismerés
– képek szegmentálása, alakzatok felismerése, mozgáselemzés, (sztereó) alakrekonstrukció
• Orvosi képfeldolgozás
– diagnosztika, műtéttervezés és -végrehajtás,
mikroszkópikus képek osztályozása, daganatok lokalizálása
• Légi- és műholdfelvételek feldolgozása
– geológia, nyersanyag-lelőhelyek felkutatása,
urbanisztika, célmeghatározás, célazonosítás
Félévi tematika áttekintése
• Regisztrációs probléma
– Alapfogalmak, csoportosítások, történeti áttekintés
• Képalkotó technikák, képek geometriája, fájlformátumok
– Fénykép, Röntgen, Ultrahang, MR, CT, PET, SPECT – 2D és 3D geometria, DICOM formátum
• Képmegjelenítés, képfúzió
• Geometriai transzformációk és végrehajtásuk
– Lineáris és nemlineáris transzformációk megadási módjai – Interpolációs módszerek digitális képek esetén
• Pontpárokon alapuló regisztráció
– Illesztő módszerek, hibaanalízisük
• Pontfelhők illesztése, felszínillesztés
– Klasszikus módszerek, jellemzőik
• Képpontok hasonlóságán alapuló regisztráció
– Hasonlósági mértékek, sablonillesztés, kiértékelés
• Nemlineáris regisztráció
• Orvosi alkalmazások, műtéttervezés és végrehajtás
• Megfeleltetés sztereó fotók között
A regisztráció fő komponensei
• Jellemzők tere
Milyen adatokat használunk a kereséshez?
– Geometriai: pontok, élek, kontúrok, felszínek.
– Képek intenzitásértékei.
• Keresés tere
A geometriai transzformáció típusa.
– Lineáris: merev-test, hasonlósági, affin, perspektív.
– Nemlineáris: polinomiális, spline-alapú, fizikai modell-alapú, stb.
• Hasonlóság mértéke
Az adathalmazaink mennyire hasonlóak.
– Geometriai jellemzők közötti távolság.
– Képpontok közötti hasonlóság.
• Keresési stratégia
Hogyan találjuk meg az optimális illesztő paramétereket?
– Direkt, közvetlen megoldás – Iteratív keresés
Keresési tér
eredeti kép merev-test
transzformáció
2D: 3 paraméter 3D: 6 paraméter
affin
transzformáció
2D: 6 paraméter 3D: 12 paraméter
nemlineáris transzformáció
2D,3D: paraméterek száma tetszőlegesen nagy lehet.
Képjellemzők tere
• Cél:
– Adatmennyiség csökkentése.
– Releváns jellemzők kinyerése.
• Jellemzők:
– Geometriai (pl. pontok, élek, felszínek).
– Intenzitások (pl. a teljes kép).
Hasonlósági mérték
• Geometriai jellemzők esetén
– Távolság mértékek (pl. Euklideszi távolság minimalizálása).
• Képpontintenzitáson alapuló
– Intenzitáskülönbségen alapuló (pl. intenzitáskülönbségek
abszolút/négyzetes összege, különbségkép előjelváltásainak száma).
– Korreláció-alapú (kereszt-korreláció, korrelációs koefficiens).
– Intenzitások együttes előfordulási mátrixán alapuló (együttes entrópia, kölcsönös információtartalom).
Hasonlósági mérték
• Példa: 1D hasonlósági mérték
Hasonlósági mérték
X-tengely menti eltolás Jó: nincs lokális optimum, globális jó
helyen.
Hasonlósági mérték
X-tengely menti eltolás Nehézkes: sok lokális optimum, de globális jó
helyen.
Hasonlósági mérték
X-tengely menti eltolás Rossz: globális optimum rossz
helyen.
Eltolás iránya.
Keresési stratégia
• direkt módszer
• „durvától a finomig” (coarse to fine)
• többfelbontású (multiresolution) piramis
• dinamikus programozási technikák
• relaxációs módszerek
• heurisztikus keresés
Képregisztráció menete
I1 F1
I2 F2
Képjellemzők kinyerése
T
T(I2) I3
Geometriai transzformáció meghatározása (regisztráció) A transzformáció alkalmazása (képillesztés)
Képfúzió
Összefoglaló publikációk
• Általános összefoglaló
– Brown, L.G.: A survey of image registration techniques.
ACM Computing Surveys 24 (1992) 325-376
– Goshtasby, A.A.: 2-D and 3-D Image Registration: for Medical, Remote Sensing, and Industrial Applications. Wiley, 2005.
– Zitová, B., Flusser, J.: Image registration methods: a survey. Image and Vision Computing, 21(11):977-1000, 2003.
– Czúni László, Tanács Attila: Képi információ mérése, Typotex Kiadó, 2011.
– J. Modesitzki. Numerical Methods for Image Registration. Oxford university Press, 2004.
• Orvosi témában
– Maintz, J.B.A., Viergever, M.A.: A survey of medical image registration.
Medical Image Analysis 2 (1998) 1-36
– Studholme, C.: Measures of 3D Medical Image Alignment. PhD Thesis, University of London (1997)
– Hajnal, J.V., Hill, D.L.G., Hawkes, D.J. (eds.): Medical Image Registration.
CRC Press (2001)
• Internet
– http://vision.ece.ucsb.edu/registration/imreg/
– http://www.imgfsr.com/
Képek közötti különbözőségek típusai
• Térbeli eltérés
– A képek más nézőpontból készültek. A megfelelő geometriai trafó ezt korrigálja.
• A felvételek készítésének körülményei mások
– Pl. mások a légköri vagy fényviszonyok műholdképek esetén, vagy más képalkotó berendezéssel készültek a képek. Ezeket nehéz modellezni.
• A képeken az objektumok változnak
– Pl. objektumok mérete nő/csökken. A regisztráció célja általában ezeknek a változásoknak a detektálása. Ezeket nem szabad
eltüntetni a transzformáció során!
• A fentiek kombinációi
Regisztráció típusai (I) Multimodális regisztráció
• Ok:
Különböző képalkotó berendezésekkel készültek a képek.
• Cél:
Információ egyesítése a további feldolgozás megkönnyítésére, pl.
szegmentációhoz, pixel osztályozáshoz.
• Példák:
– Orvosi képfeldolgozás: az egymást kiegészítő anatómiai és funkcionális képtartalmak a diagnózist megkönnyítik.
– Távérzékelés: műholdképeknél más elektromágneses csatornákból
(mikrohullám, radar, infravörös, légi felvétel, többspektrumos) származó képek integrálása megkönnyíti az épületek, utak, járművek, növényzet osztályozását.
Regisztráció típusai (II)
Sablon (template) regisztráció
• Ok:
Modell alapú megközelítés.
• Cél:
Objektum keresése vagy felismerése a képen.
• Példák:
– Légi- és műholdképek esetén jól definiált helyszínek értelmezése (pl.
repülőterek esetén kifutópályák, terminálok helyének és irányának meghatározása).
– Alakfelismerés: karakterek felismerése, aláírás ellenőrzése.
Regisztráció típusai (III)
Nézőpont (viewpoint) regisztráció
• Ok:
Különböző nézőpontokból készülnek 2D képek 3D színtérről.
• Cél:
Alakrekonstrukció.
• Példák:
– Számítógépes látás: mélységi és alaki helyreállítás a különbségek alapján.
– Objektumok mozgásának követésére.
Forrás: http://grail.cs.washington.edu/projects/mvscpc/
Regisztráció típusai (IV)
Idősorozat (temporal) regisztráció
• Ok:
Különböző időpontokban és/vagy különböző feltételek mellett készültek a képek.
• Cél:
Változások detektálása, megfigyelése.
• Példák:
– Orvosi képfeldolgozás: DSA (kontrasztanyag beadása előtti és utáni képek kivonása).
– Légi- és műholdképek: erdők, városok és a felszín egyéb változásainak megfigyelése.
Orvosi képek regisztrációja
A betegről készült vizsgálatok illesztése
– megbízhatóbb diagnosztikai információt biztosít, – segíti a kép megértését,
– javítja a műtét- és terápiatervezést, valamint a kiértékelést.
Orvosi képek regisztrációja
Lehetséges alkalmazások:
– Különböző modalitásokból származó információtartalmak egyesítése
• Pl. funkcionális információ anatómiai képre.
– Méret, alak, képintenzitás változásainak időbeli követése
• Pár másodperctől akár évekig.
– Műtét előtt készült képek és műtéti tervek megfeleltetése a beteg testéhez műtét közben
• CIS – Számítógéppel végrehajtott műtéttervezés és végrehajtás.
– A betegről készült kép atlaszra való vetítése.
Dimenzionalitás
• Csak térbeli dimenziók (2D/2D, 2D/3D, 3D/3D)
• Idősorozatok (2D/2D, 2D/3D, 3D/3D)
– kontrasztanyag beadása előtt és után (nagyon rövid időköz), – műtét után a gyógyulás figyelésére (rövid intervallum),
– daganat növekedésének figyelése (közepesen hosszú), – csontok növekedése gyermekek esetén (nagyon hosszú
időközök).
Dimenzionalitás – 2D-3D
• Modellezük a 2D
képalkotást, így 3D-ből 2D képet állítunk elő.
(Digitally Reconstructed Radiographs - DRR)
• A "legjobban hasonlító"
állapotot keressük.
2D-3D (Zöllei Lilla, MIT)
2D-3D (Zöllei Lilla, MIT)
Képjellemzők típusa
• Külső (mesterséges)
– sztereotaktikus keret
• legpontosabb, de invázív
– fejhez, foghoz rögzített
eszközök, bőrön elhelyezett jelölők
• kényelmesebb, de pontatlanabb
• Belső
– anatómiai területek
• pontok, felszínek
– geometriai jellemzők – képpontintenzitások
– retrospektív megközelítés
Képjellemzők típusa
• Illeszkedés biztosítása a képalkotás során
– Pl. asztalhoz rögzített maszkkal pozícionálják a beteget – Ugyanazon képalkotó berendezés
– Néhány mm hiba
– Nincs szükség regisztrációra
Transzformáció
• Típus
– merev-test – affin
– polinomiális – nemlineáris
• Hatáskör
– globális – lokális
Optimalizáló eljárás
• Paraméterek közvetlen (direkt) számítása
• Paraméterek (iteratív) keresése
– Powell, Downhill simplex, Levemberg-Marquardt, Newton-Rapson, sztochasztikus keresések,
genetikus algoritmusok, többfelbontású technikák
Modalitások (I)
• Egymodalitásos
– idősorozat
– eltérő protokoll – atlasz illesztés
• Többmodalitásos
– kiegészítő képtartalmak
Modalitások (II)
• Modalitás – Modell • Modell – Fizikai tér
Prostate biopsy project, Johns Hopkins University, Baltimore, MD, USA
Interaktivitás
• Interaktív (manuális)
Jó megjelenítő szoftver szükséges. Munkaigényes.
• Félautomatikus
Megbízható, gyors, de tapasztalt felhasználót feltételez.
• Felhasználó inicializál (pl. pontkijelölés, szegmentáció).
• Felhasználó dönt (elfogad/elutasít).
• Mindkettő együtt.
• Automatikus
– Egyszerűen használható.
– Általában pontos, de ellenőrzést igényel.
– Bonyolult esetben nagy futásidőt igényelhet.
Illesztés típusa
• Egy beteghez tartozó (intrasubject)
• Betegek közötti (intersubject)
• Atlasz illesztés
Vizsgált szerv
• Fej
– Agy, koponya, szem, fogak
• Mellkas
– Szív, mell, teljes mellkas
• Has
– Vese, máj, teljes hasi rész
• Medence
– Prosztata, hólyag
• Végtagok
– Combcsont, felkarcsont, kéz, lábfej
• Gerinc
Történeti áttekintés (orvosi területen)
• 1900-as évek eleje óta
– Képi információval irányított sebészet (image-guided surgery)
• tű eltávolítása kézből (Birmingham, 1895)
• csaták után gránátrepeszek eltávolítása két kalibrált röntgen kép segítségével
• sztereotaktikus keretek (csontba rögzített eszközök)
• 1980-as évek közepe
– Igény retrospektív regisztrációra, munkaigényes
• 1990-es évek
– Automatikus retrospektív módszerek, intra- és inter-modalitás
• Manapság:
– Nemlineáris transzformációk, szövetdeformációk modellezése
• A számítógépes hardware fejlődése nagyban befolyásolta:
– Agyvizsgálat illesztése
• 1994 - több mint 1 óra futásidő, drága hardware
• 2000 - néhány perc futásidő, sokkal olcsóbb hardware
KÉPREGISZTRÁCIÓ
KÉPALKOTÓ TECHNIKÁK ÉS KÉPREPREZENTÁCIÓ
Tanács Attila
Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem
A tananyag az EFOP-3.5.1-16-2017-00004 pályázat támogatásával készült.
Képalkotás, megjelenítés
• Rendkívül fontos a képek és a regisztrációs eredmények jó megjelenítése
– Képek geometriája, színskálák – Koordináta-rendszerek
– Szeletorientációk 3D-ben – Képformátumok
– Képfúziós technikák
Képalkotás
• Az elektromágneses tartomány különböző részeinek mérésével
– Tárgyak felszínéről visszaverődő sugárzás
• Hagyományos fotók (2D)
– Látható tartomány, 2D érzékelő, lencserendszer
• Multispektrális képek (2D)
– Több, akár nem látható tartományból együttesen készül
– Tárgyakon áthaladva: vetületi képek (2D), rekonstruált képek (3D)
• Transzmissziós képek (2D, 3D)
– Objektumon áthaladó sugárzás alapján (rekonstrukció vagy vetület)
• Emissziós képek (2D, 3D)
– Objektumból származó sugárzás mérése (rekonstrukció vagy vetület)
• Egyéb technikák
– Pl. ultrahang, (lézeres) távolságmérés
Elektromágneses tartomány
• Különböző energiával rendelkező fotonok
– Egyező elv, más eszközök az előállításhoz és a detektáláshoz
Képek forrása: Wikipedia
• Természetes és mesterséges fényforrások
– Nap, közvilágítás, vaku, …
• A tárgyakról fény verődik vissza
– Anyagára jellemző mértékben a fény egyes
komponenseit elnyeli (szín), a többit visszatükrözi (matt, csillogó, …)
• A fénysugarak lencsék segítségével az érzékelőre jutnak
– Közeghatáron a fény útja megtörik, így irányítható a kis méretű érzékelőre
• Az érzékelő digitális jellé alakítja az impulzusokat
– Mintavételezés és kvantálás
Látható fény-alapú fotózás
Látás és leképezés
• Emberi szem és egy DSLR kamera keresztmetszete
– Képi információ mérése jegyzet alapján
Látás és leképezés
• Lyukkamera
– Fény kis lyukon, a vetítési középponton keresztül vetül a képalkotó síkra
– „Fejenálló” kép – „Camera obscura”
• National Geographic 2013. novemberi száma,
• Eger, Varázstorony
– Egyszerű matematikai modell
Fotó: Szász Péter –http://bp.underground.hu
Látás és leképezés
• Gyűjtőlencse
– Közeghatáron változik az irány – Éles kép: X-ből induló sugarak
a képsíkon 1 pontban találkoznak
– Apertúra (nyílás nagyság) hatása
• Mélységélesség
• Adott tartományon belül még elfogadható mértékű az
elmosódás
Panasonic lencse szabadalmak
Látás és leképezés
• Lencse torzítások
– Szoftveresen korrigálható
– Kamerák rendszerint ezt alkalmazzák is
• Nyers formátumú képadatban viszont látható
• Érzékelő
– Érzékenység (ISO) – Felbontás (MP) – Méret, típus
• Objektív
– Zársebesség – Fókusztávolság
• Zoom-átfogás
– Rekeszérték
• Megvilágítás
– Mennyisége, egyenletessége
• → HDR technika (High Dynamic Range – több fotó felhasználásával)
– Színhőmérséklet
Joseph Ciaglia, Barbara London, John Upton, Peter Kuhns:
Absolute Beginner's Guide to Digital Photography
Képalkotás főbb paraméterei
Távérzékelés
• Feladata
– Földfelszínről nagyobb távolságból készített adatok készítése és feldolgozása
• Története
– 1858: léghajó + kamera (pár 100 méter) – 1910-es évek: repülőgépről légi fotózás
• Sztereó képpárok
– 1940-es évek: rakéta technológia (több 100 km) – 1960-as évek: műholdas programok
• Alkalmazási területek
– Állapotfelmerésre és változáskövetésre
– Meteorológia, földtan, mezőgazdaság környezetvédelem, vízgazdálkodás, térképészet, katonaság
Alkalmazások
• Mezőgazdaság
– Reflektanciagörbe alapján: növényzet fajták szerint csoportosítása, betegségek észlelése, talaj típusának megállapítása
• Térképészet
– NASA SRTM programja
• 2000-ben, Endeavour űrrepülő
• Földfelszín 80%-át lefedő digitális domborzati modell
• Radar-alapú felmérés
• Felbontása: 30 méter (USA) – 90 méter (máshol)
• Ingyenesen elérhető
Alkalmazások
• Változáskövetés
– Több hónapos vagy éves eltéréssel készült fotók
– Urbanizáció mértéke, katasztrófák esetén a változás mértéke
– Hatalmas adatmennyiség!
• Automatizálás célja: az emberi munka elegendő legyen a problémás területeken
Orvosi képalkotó berendezések
• 2D képalkotás
– Anatómiai
(morfológiai) képek
• Röntgen
• Ultrahang
– Funkcionális képek
• Gamma kamera
• 3D képalkotás
– Anatómiai
(morfológiai) képek
• MR
• CT
– Funkcionális képek
• SPECT
• PET
• fMRI
Részletesebb anyag:
Képi információ mérése jegyzet 6.1 alfejezete (magyarul)
Medical Imaging Systems – An Introductory Guide (angol nyelven)
2D képalkotás
Röntgen (X-ray) Ultrahang (Ultrasound)
Röntgen működési elv
Röntgen fő jellemzők
• Testen áthaladó sugárzás
– Nagy dózisban egészségkárosító lehet!
• 2D vetületi kép
– 3D helymeghatározás nehézkes
• Olcsó és elterjedt technika
– Elsősorban csontozatot érintő belső
elváltozások diagnosztizálásra
Ultrahang fő jellemzők
• Magas frekvenciás hanghullámok
– Ember számára nem hallhatók
– Szövethatárról visszaverődés érzékelődik – Valós idejű 2D szelet képalkotás
• Hozzáértést igényel!
– Laikus számára nehéz a képi értelmezés
• Egészségkárosító hatása nem ismert
• Elterjedt és olcsó technika
MR CT
PET SPECT
3D modalitások
3D anatómiai képalkotás
Mágneses rezonancia (Magnetic Resonance)
256x256
Számítógépes tomográfia (Computed Tomography)
512x512
Forrás: Hack Zoltán szakdolgozata
Forrás: Hack Zoltán szakdolgozata
Mágneses rezonancia képalkotás
• Elterjedt, de időigényes vizsgálat – 1980-as évektől
– Lágy szövetek (víz tartalmú) jó megjelenítése
– Erős konstans mágneses mező + rádiófrekvenciás impulzus + annak hatására felszabaduló impulzusok mérése
– Valódi 3D képalkotás
– Viszont nemlineáris torzulás léphet fel a képen
• Jó térbeli felbontás
– Jellemzően 0,5 mm – 1 mm
• Egészségkárosító hatása nem ismert
– Viszont az erős mágneses mező miatt ferromágneses tárgyakat nem vihetünk be. Pl. szívritmus-szabályzó, fém implantátum, stb.
kizáró ok lehet.
– Kényelmetlen, klausztrofóbiás reakciót válthat ki
• Angol nyelvű rövid áttekintés
– https://www.radiologymasterclass.co.uk/tutorials/mri/mri_scan
CT képalkotás
• Elterjedt vizsgálat típus
– 1980-as évektől
– Elsősorban csontozat megjelenítésére
– Röntgen sugárzás alapú. 1D vetületekből 2D szelet rekonstrukció.
– Újabb változatai spirál alakban mozognak a beteg körül – még gyorsabb képalkotás
– Újabban PET technikával ötvözik – Geometriailag korrekt képet ad
• Jó térbeli felbontás
– Jellemzően 0,25 mm – 0,5 mm
• A röntgen miatt egészségkárosító lehet!
3D funkcionális képalkotás
SPECT
(Single Photon Emission Computed Tomography)
64x64
(Positron Emission PET Tomography)
128x128
SPECT képalkotás
• Testbe juttatott sugárforrás
– Izotóp injekció: normál molekula (pl. cukor) + radioaktív követő (tracer)
– Gamma-bomláson alapul
– Nagyobb felezési idő, laboratóriumtól távolabb is végezhető vizsgálat
• Gyenge térbeli felbontóképesség
• Hosszú vizsgálati idő
PET képalkotás
• Testbe juttatott sugárforrás
– Izotóp injekció: normál molekula (pl. cukor) + radioaktív követő (tracer)
– Pozitron kibocsátás bomláskor, elektronnal ütközés megsemmisülést okoz, ami két, ellentétes irányba mozgó fotont eredményez. Az egyidejű becsapódás detektálható külső detektoron.
– Kisebb felezési idő, elektrongyorsító szükséges a közelben
– CT berendezéssel kombinálják újabban
• Gyenge térbeli felbontóképesség
• Hosszú vizsgálati idő
3D funkcionális képalkotás
fMRI
(functional Magnetic Resonance)
256x256
Forrás: http://www.fmrib.ox.ac.uk/fmri_intro/brief.html
• Normál MRI, majd 1 másodperces, gyors képalkotás.
• Agyi oxigénszint mérése: hol nagy az aktivitás éppen, mely agyterület működik egy
cselekvés hatására.
Digitális képek geometriája
• 2D vagy 3D mátrix (2D szeletek sorozata)
– Dimenzionalitás (sorok, oszlopok, szeletek száma) – Térbeli felbontás (1 képpont mérete mekkora a valós
térben)
– Általában 8-12 bites intenzitásérték képpontonként
• Problémák
– Szelettávolság nem állandó (pl. CT).
• Fontosabb részeken sűrűbb, máshol csak áttekintő képet ad.
– Döntött képalkotó sík (gantry tilt - pl. CT).
– A szeletek nem párhuzamosak egymással (pl. ultrahang).
Ultrahang képsorozatok
Forrás: Randy Goldberg, CISST, JHU, Baltimore, MD
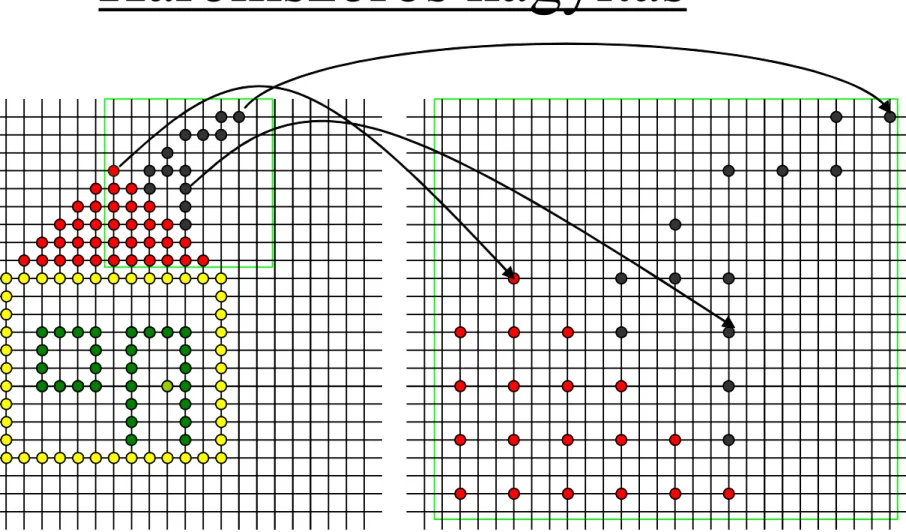
Mintavételezés
Ugyanazon tárgyról készült két különböző térbeli felbontású 2D digitális kép mintavétele- zési rácsai. A képpontok helye a rácspontokban található.
X objektumról készült A és B képek.
𝐴: 𝑥𝐴 ∈ Ω𝐴 ⟼ 𝐴(𝑋𝐴)
Térbeli pozícióhoz tartozó intenzitásérték (mérhető anyagjellemző); pixel, képpont.
Δ diszkrét mintavételezési rács 𝛿 = (𝛿𝑥, 𝛿𝑦, 𝛿𝑧) mintavételezési lépésközzel.
Mérés a pontban, vagy szűk környezetében.
Duális képpont definíció: rács mozaik.
Szelettávolság, szeletvastagság.
A mintavételezett kép hagyományos képmátrix megjelenítése, figyelmen kívül hagyva az eltérő mintavételezési léptéket és orientációt.
Koordináta-rendszerek
• Képpontok helyzetének meghatározása:
– IJK (index)
• A képmátrix sorai, oszlopai, szeletei indexelve.
• Gyakran nem izotropikus!
– RAS (beteg)
• Betegközpontú rendszer (bal-jobb, elől-hátul, fent-lent).
• Milliméteres, izotropikus.
– WLD (világ)
• Világkoordináta-rendszer, pl. a képalkotó rendszeré.
• Milliméteres, izotropikus.
Szeletorientációk
• (Transz)axiális
– A beteg hosszanti tengelyére merőleges sík.
• Sagittális
– A beteg bal-jobb tengelyére merőleges sík.
• Coronális
– A beteg elől-hátul (anterior-posterior) tengelyére merőleges sík.
• Ferde metszet
– Egyik főtengelyre sem merőleges sík.
Koordináta-rendszerek
Forrás: DICOM specifikáció, Slicer demó
Koordináta-rendszerek
Forrás: DICOM specifikáció
Insight Toolkit (ITK)
• Eszköz képfeldolgozó, szegmentációs és regisztrációs problémák megoldására
– C++, nyílt forráskódú, platformfüggetlen
– Generikus programozás template-ek használatával
– Összekötés Tcl/Tk, Java, Python nyelvekkel, interfész VTK-hoz
– Regisztrációs keretrendszer
• Képregisztráció, többfelbontású technikák, PDE-alapú regisztráció és FEM regisztráció.
– I/O keretrendszer
• DICOM elemző
• Anyagok
– Webhely: http://www.itk.org – Letöltés, dokumentáció:
https://itk.org/ITK/resources/software.html
SimpleITK
• Az ITK egyszerűsített verziója
– http://www.simpleitk.org
– Túl bonyolult és nehézkes a C++ ITK
– Leggyakoribb (képpont) típusokra rögzített – Python és Java bináris disztribúció
• Python
– NumPy, SciPy, Matplotlib Python csomagok szükségesek
– Átjárás itk::Image és NumPy tömbök között
• Feldolgozás SimpleITK szűrőkkel vagy NumPy eszközökkel
• NumPy tömb megjeleníthető standard Python eszköztárral
– Jupyter-Notebook kapcsolat
• Kód, kommentár és eredmény weboldalon
• http://insightsoftwareconsortium.github.io/SimpleITK- Notebooks/
itk::Image
• Kép intenzitásértékei és térbeli paraméterei
– Képpontok típusa
• Egész, lebegőpontos, vektor, bit szélesség
– Dimenzió
• Hány sor, oszlop, szelet
– Térbeli felbontás (spacing)
• Fizikai méret a tengelyek mentén
– Tengely irányok (direction)
• A kép X-, Y-, Z-tengelyei a világ koordináta-rendszerben merre mutatnak
– Origó
• IJK koordinátája az első képpontnak
– Index
• Melyik sor/oszlop/szelet értékét akarjuk címezni
– Régió
• A kép mekkora része érhető el
– Teljes kép, memóriába betöltött rész, feldolgozás alatt álló rész
ITK Image
KÉPREGISZTRÁCIÓ
ORVOSI KÉPFORMÁTUMOK ÉS MEGJELENÍTÉS
Tanács Attila
Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem
A tananyag az EFOP-3.5.1-16-2017-00004 pályázat támogatásával készült.
Kórházi információs rendszerek
• Rengeteg orvosi információ naponta
– Vizsgálati eredmények, laboreredmények,
zárójelentések, műtéti protokollok, adminisztrációs adatok, …
• Fontos a rendezett tárolás és adatelérés!
– Kórházi információs rendszerek (HIS – Hospital Information System)
– Komplex feladat, nehéz egységes megközelítést adni – Részfeladat: orvosi képek továbbítása és tárolása
• PACS (Picture Archiving and Communication System)
• További információk
– Képi információ mérése jegyzet 6.4 alfejezete – Képi adatbázisok kurzus
Orvosi képformátumok
• Általában tartalmaznak:
– Fejléc információt (meta-adatok)
• fejléc, térbeli méret, pozíció, beteg elhelyezkedése (pl. hason/háton), a felvétel készítésének körülményei, betegadatok (nem publikus!).
– Képi információt kódolva
• képpontértékek tömörítve, tömörítés nélkül,
• színskála, szegmentálás eredménye, maszk (opcionális).
• Egyre több kórházban van PACS rendszer üzemben
– Elterjedt szabvány: DICOM
– Más formátumok (elsősorban kutatási feladatokhoz)
• pl. Interfile, Analyze, MetaImage, NRRD, …
Metaimage fájl formátum
• Kiterjesztések
– .mhd (fejléc), .raw (tömörítetlen adat), zraw (tömörített adat)
– .mha (fájl elején szöveges fejléc, majd bináris
adat)
Metaimage fájl formátum
ObjectType = Image NDims = 3
BinaryData = True
BinaryDataByteOrderMSB = False CompressedData = True
CompressedDataSize = 8702333
TransformMatrix = 0.0266429 0.999642 0.00245366 -0.00180059 0.00250252 -0.999995 -0.999643
0.0266384 0.00186662
Offset = 58.6319 -134.061 63.147 CenterOfRotation = 0 0 0
AnatomicalOrientation = ASL
ElementSpacing = 0.4688 0.4688 6.00002 DimSize = 512 512 23
ElementType = MET_SHORT
ElementDataFile = MRI_SagT2FRFSE.zraw
NRRD fájl formátum
• Kiterjesztés
– .nrrd
• Tartalma
– Fejléc adatok szöveges formában, majd – Bináris adat
• További információ
– http://teem.sourceforge.net/nrrd/format.html
NRRD fájl formátum
NRRD0004
# Complete NRRD file format specification at:
# http://teem.sourceforge.net/nrrd/format.html type: short
dimension: 3
space: left-posterior-superior sizes: 256 256 159
space directions: (0.93750000000000022,0,0)
(0,0,0.93750000000000022) (0,-1.5000000000000004,0) kinds: domain domain domain
endian: little encoding: gzip
space origin: (-119.53125000000003,
118.50000000000001,-119.53125000000003)
Színskálák
• A pixelek nem színt definiálnak, hanem
intenzitásértéket, ezt valamilyen színné kell alakítani megjelenítéskor.
– Szürkeárnyalatos, – szivárványskála, – forró fém skála, – stb.
• Intenzitás résztartomány kiválasztása megjelenítéshez.
– Küszöbölés, vágás, ablakolás (Window/Level)
• Anyag
– Képi információ mérése jegyzet 6.3 alfejezete
Hounsfield skála (CT)
. együttható
s abszorbció
az ahol
,
víz
h
víz
Forrás: ?
-1000
window level
1000
0 255
intenzitások
színskála
Ablakolás (Window/Level)
3D képek megjelenítése
• Szeletsorozat
– Több, azonos orientációjú szelet egyidejű megjelenítése
• Többszeletes rekonstrukció
– Különféle orientációjú képek együttese
• Felszín vizualizáció
– Objektumok szegmentálása, közelítő felszínháló generálása
• Térfogat vizualizáció
– Objektumon áthaladó sugarak mentén elnyelődés számítása
Szeletsorozat
Többszeletes rekonstrukció
Forrás: Slicer demó
Felszín vizualizáció
Térfogat vizualizáció
Regisztrációs eredmények megjelenítése
• Összekapcsolt célkereszt (linked cursor)
• Képfúzió
– színsíkok használata (color overlay), átlátszóság
• vörös-zöld, színárnyalat-szürke
– "sakktáblás" megjelenítés
– képek gyors váltogatása (manuális, automatikus) – osztott megjelenítés (pl. egyenes vonal mentén) – különbségkép
– képek megjelenítése standardizált térben (pl. Talairach) – felszínkivonás + színezés
– kontúrok vetítése a képre
Regisztrációs eredmények megjelenítése
• Nemlineáris regisztráció esetén deformáció megjelenítése.
– Vektorok,
– Deformált négyzetháló,
– Színkódolás (pl. az elmozdulási vektor magnitúdója).
Színsíkok használata
Sakktáblás mozaik
Átlátszóság
Forrás: Slicer demó
Kontúrok
Forrás: D.L.G. Hill
Elmozdulási vektorok
Forrás: D.L.G. Hill
Deformált négyzetháló
PET-CT fúzió
Képek forrrása: http://www.hokuto7.or.jp/equipment/pet-ct/pet-ct.html
Változó expozíciós idejű fotók fúziója
• Motiváció
– Ha a fényeloszlás nem egyenletes, bizonyos részek
• túlexponáltak és/vagy
• alulexponáltak lesznek.
• Megoldás
– Több képet készítünk más beállításokkal – Képeket kisebb részekre osztjuk
– A legnagyobb információtartalmú részt választjuk – A képrészek színeit összeelegyítjük
• Feltétel
– A fényképek már regisztrálva vannak, nincs mozgó objektum
A.A. Goshtasby: Fusion of multi-exposure images. Image and Vision Computing, vol. 23, pp. 611–618, 2005.
Képek forrása: A.A. Goshtasby
Képek forrása: A.A. Goshtasby
Képek forrása: A.A. Goshtasby
Információtartalom mérése
• Képek felosztása
– dxd méretű blokkokra
• Entrópia számítása a blokkokra
– Szürkeárnyalatos és színes képek esetén
– Színes képek esetén
• 256 leggyakoribb szín előzetes kiválasztása
• RGB színtér helyett CIELab vagy CIELuv színtérben )
255 log(
0 i
i i
g p p
E
255 log( )
0
ic i
c pc p
E
Fúzionált kép
• Új kép összerakása
– Legnagyobb entrópiájú blokk választása
Képek forrása: A.A. Goshtasby; Osztroluczki András és Zajác Erik
Blokkhatároknál finom átmenet biztosítása!
Fúzionált kép
• Új kép összerakása
– Legnagyobb entrópiájú blokk választása
• Blokkhatároknál finom átmenet biztosítása
– Racionális Gauss (RaG) elegyítő függvények
• Teljes képtartományon értelmezettek
• Minden pontban 1 ezek összege
) , ( )
, ( )
, (
1 1
y x I
y x W
y x
O n jk
j n
k jk
r c
nr c
m
n
n mn
jk
jk G x y
y x y G
x W
1 1 ( , )
) , ) (
,
(
2 2 2
2
) (
) exp (
) ,
(
jk jk jk
y y
x y x
x G
j,k-dik blokk középpontja
Algoritmus
1. Blokkméret (d) és az elegyítés szélességének (σ) kezdeti beállítása, ezek változtatásának Δ lépésközének rögzítése.
2. Minden képet bontsunk fel dxd méretű blokkokra és számítsuk ki a blokkok entrópiáját. Minden
blokkpozíción válasszuk a legnagyobb entrópiájút.
3. Elegyítsük a képblokkokat és határozzuk meg a fúzionált kép entrópiáját.
4. Változtassunk d és σ értékén és hajtsuk végre a 2. és 3.
lépéseket. Válasszuk azon paramétereket, amelyek a legmagasabb entrópiát biztosítsák.
5. Ezekkel a paraméterekkel készítsük el az eredményképet.
Megoldandó problémák
• Geometriai eltérés
– Képalkotáskori bemozdulás miatt
– Állvány használata vagy szoftveres regisztráció
• Mozgó objektumok
– Detektálásuk szükséges
– Pl. A legnagyobb kontraszttal rendelkező
változatot bemásolni az eredmény képre
HDR eredmény Bemeneti képek
Nagymértékű elmozdulás torzító hatása
HDR Camera+ alkalmazás (Android)
HDR eredmény Bemeneti képek
Mozgó alakzatok kiszűrése
HDR Camera+ alkalmazás (Android)
Kiterjesztés multifókusz képekre
• A fókusz beállításától függően közeli vagy távoli objektumok elmosódottak lehetnek.
• Készítsünk képeket többféle fókuszbeállítással.
• Bontsuk a képeket blokkokra.
• Válasszuk ki a legélesebb blokkokat.
• Élesség mértéke: gradienskép magnitúdójának négyzetösszege
• Képblokkok elegyítése
Képek forrása: A.A. Goshtasby
Képek forrása: A.A. Goshtasby
KÉPREGISZTRÁCIÓ
GEOMETRIAI TRANSZFORMÁCIÓK ÉS INTERPOLÁCIÓS MÓDSZEREK
Tanács Attila
Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem
A tananyag az EFOP-3.5.1-16-2017-00004 pályázat támogatásával készült.
Geometriai transzformációk
• Függvény
• Típusok
– m > n: vetítés (dimenzióvesztés) – m = n: normál transzformáció
n
m R
D :
Dm m, Rn n,n,m 1
Geometriai transzformációk
• Megadási módok
– Parametrikus
• Kis számú paraméter, képlet
– Nem-parametrikus
• Elmozdulási mező
– Digitális képekre, vektor minden képponthoz
• Kényszerfeltétel (regularizáció)
• Fizikai modellre épülő nemlineáris transzformációknál szokásos
Geometriai transzformációk
• Lehetséges megszorítások
– φ tetszőleges leképezés – φ invertálható leképezés – φ diffeomorfizmus
• Invertálható, differenciálható, inverze is differenciálható („sima”, „nem gyűrődik fel”)
– φ terület/térfogat megőrző – φ lineáris
• Előáll a koordináták lineáris kombinációjaként
– φ megőrzi a pontok közötti távolságot
• Merev-test transzformáció
Geometriai transzformációk
Transzformáció típusa (2D) Tulajdonság
Eltolás (2 DOF) Orientáció-, távolság- és szögtartó Merev-test (eltolás és elforgatás)
(3 DOF) Távolság-, terület és szögtartó
Hasonlósági (merev-test + uniform
skálázás) (4 DOF) Szögtartó, távolság-arány tartó Affin (merev-test + skálázás + nyírás)
(6 DOF) Párhuzamosságtartó, területarány-tartó,
hosszarány-tartó párhuzamos vagy egy egyenesbe eső egyeneseken, vektorok lineáris kombinációit (pl. súlypont) megtartja
Perspektív (síkhomográfia) (8 DOF) Egyenes képe egyenes, keresztarány- tartó (hosszarányok aránya)
Nemlineáris Egyenes képe görbe. Pl. spline-alapú
deformációk, hordó-, tűpárna torzítás
• Koordináták lineáris kombinációja + eltolás
• Tulajdonságok
– Egyenes képe egyenes marad – Párhuzamosságtartó
– Nem szögtartó
– Megadható mátrixműveletekkel
1 , 2
2 1
1
1
'
) ,
, (
m i m
im i
i i
m m
a x
a x
a x
a x
x x
P D
P
Lineáris (affin) transzformációk
2D transzformációk homogén koordinátákkal
Az (x,y) homogén koordinátája:
(x,y,W),
amelyre teljesül, hogy (x,y,W) = (x’,y’,W’),
ha : x’= ∙x, y’= ∙y, W’= ∙W, vagyis egy ponthoz végtelen sok (x,y,W) tartozik.
Ha W0, akkor az (x,y) szokásos jelölése: ; ha W=0, akkor (x,y,0) végtelen távoli pont.
, ,1
W y W
x
Kapcsolat (x,y) és (x,y,1) között:
• az (x,y,W) homogén koordináta és az (x,y) Descartes-koordináta közötti
összefüggés (ha W≠0):
x = W X , y = W Y .
Kapcsolat (x,y) és (x,y,1) között
y
W
, 1, W
y W
x P(x,y,W)
x
P vetülete a W=1 síkon (ezen a síkon vannak a homogén
koordináták)
(Végtelen távoli pontok nincsenek a síkon.)
Az elemi transzformációk
homogén koordinátás megadása
a lineáris transzformáció mátrix műveletekkel elvégezhető:
egységes kezelhetőséghez homogén koordinátákat használunk:
y x
p p y
x T
T
T T
y x
22 21
12 11
' '
1 1
0 0
1 ' '
22 21
12 11
y x p
T T
p T
T y
x
y x