6.9. Lendítőkerekes
energiatárolók korszerű hajtásai és szabályozási módszerei
6.9.1. Lendítőkerekes
energiatároló hajtás működése
A lendítőkerekes energiatároló az L szögsebességgel forgó L tehetetlenségi nyomatékú tömeg EL kinetikus energiáját hasznosítja. A maximális kinetikus energia a maximális szögsebességhez tartozik
EL = 12θLωL2, ELmax = 12θLωLmax2 (6.1a,b)
A tárolható ELmax energia k-ad részét akarjuk hasznosítani
∆ELmax = ELmax-ELmin = kELmax (6.2)
E = 1θ ω2 = (1 − k)E (6.3)
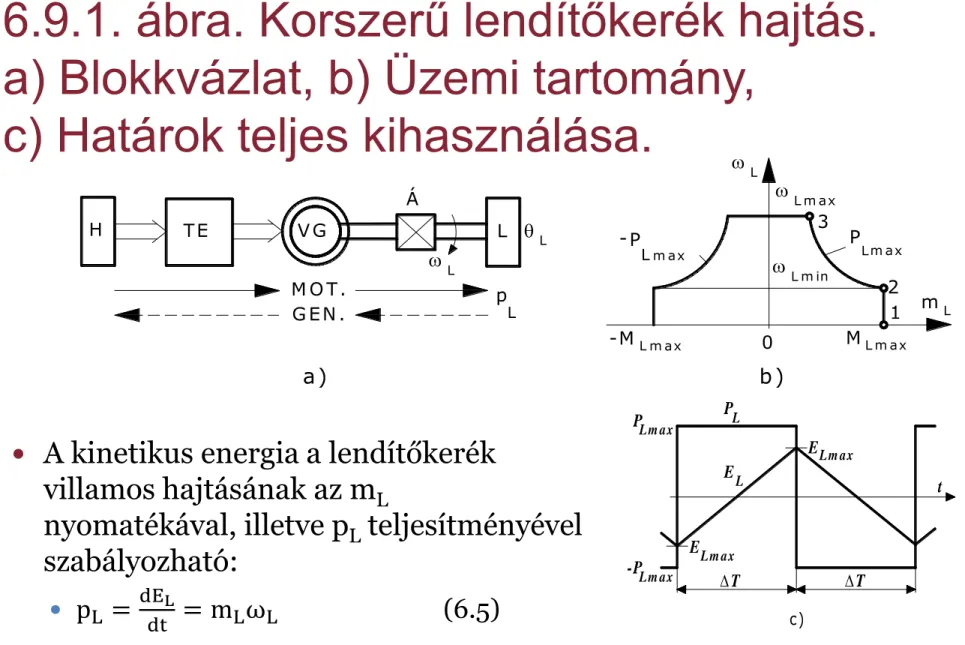
6.9.1. ábra. Korszerű lendítőkerék hajtás.
a) Blokkvázlat, b) Üzemi tartomány, c) Határok teljes kihasználása.
2
A kinetikus energia a lendítőkerék villamos hajtásának az mL
nyomatékával, illetve pL teljesítményével szabályozható:
pL = dEdtL = mLωL (6.5)
H T E V G
Á
L
M O T.
G E N .
L
L
pL
L
L m ax
L m in PL
PLm ax
-MLm ax 0 ML
3
2 1 -
mL
a) b )
m ax
m ax
PL m ax
L m ax
-P
PL
EL
E
EL m ax
L m ax
T T
t
c)
Idők:
A következőkben optimális és veszteségmentes viszonyokat tételeztünk fel. Ilyenkor a hajtás
T=TLin(2k)/(22k) (6.6)
idő alatt képes a lendítőkereket álló állapotból Lmax-ra felgyorsítani, ELmax kinetikus energiával feltölteni az 1-2-3 jelű pontoknak megfelelően.
Üzem közben maximálisan
∆T = T − TLin = 2−2kk CTVGin (6.7)
ideig képes PLn=PLmax teljesítményt leadni/felvenni a lendítőkerekes hajtás.
Az 6.9.1.c. ábra mutatja azt a határokat teljesen kihasználó esetet, amikor a pL teljesítmény PLmax között lüktet 2T periódus idővel és az EL energia ELmin és ELmax között változik lineárisan.
EL = pLdt
A feladat
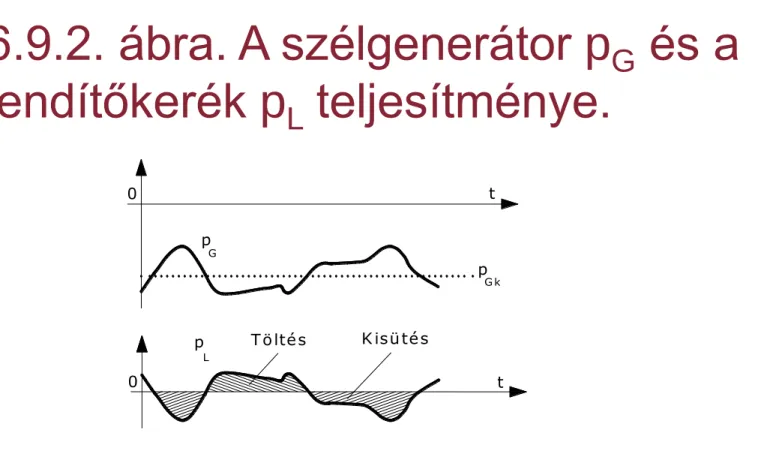
6.9.2. ábra. A szélgenerátor p
Gés a lendítőkerék p
Lteljesítménye.
4
A lendítőkerék hajtás feladata lehet pl. egy szélgenerátor által szolgáltatott, a turbulencia miatt lüktető pG teljesítmény kiegyenlítése. Ez a 6.9.2. ábra szerint pL=pGkpG lendítőkerék teljesítményt jelent.
p
p
p
G k G
L
0
0
t
t K isü tés
T öltés
Kezdőértékek, középértékek:
A teljesítménylüktetés kompenzálásának a megkezdésekor a lendkerék szögsebességét úgy célszerű beállítani, hogy a
kompenzálási energiatartalék szimmetrikus és egyben maximális legyen. Ehhez EL=ELk és L=Lk értékek tartoznak:
ELk = ELmin+E2 Lmax = θLω2Lk2 ωLk = ωLn 2−2k2−k = ωLmax 2−k2 (6.8a,b) (Ln=Lmin).
Pl. k=0,75-nél, ωLk = ωLn 2,5 ELk=2,5ELmin, ELmax=4ELmin,
k=0,9-nél, ωLk = ωLn 5,5 ELk=5,5ELmin, ELmax=10ELmin.
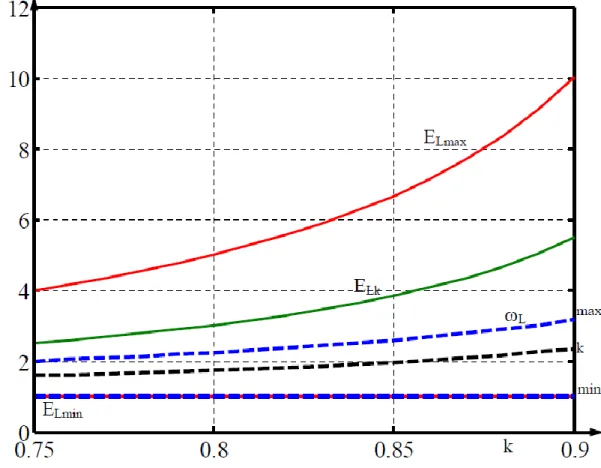
6.9.3. ábra. Lendítőkerekes energiatároló működési határai k függvényében.
6
A 6.9.3. ábra a k függvényében mutatja az energia és szögsebességhatárokat, valamint a célszerű közepes értékeket a névleges (Ln=Lmin, ELn=ELmin) értékekre normalizálva.
A kompenzálandó teljesítmény
lüktetési frekvenciájának korlátja
Ha a lendkerék teljesítmény pl. Pm amplitúdójú és p körfrekvenciájú koszinuszos függvény szerint változik, ekkor a lendkerék energiája szinuszos lefolyású :
pL=Pmcospt=mLL. (6.9)
EL = p0t Ldt + EL0 = Pωm
P sinωPt + EL0 (6.10)
(6.1.a) alapján a lendítőkerék hajtás szögsebességének és nyomatékának időfüggvényei:
ωL2 = ωLP2 sinωPt + ωL02 ωLP2 = θ2Pm
LωP (6.11)
mL = ωPL
L = PmcosωPt
ωLP2 sinωPt+ωL02 (6.12)
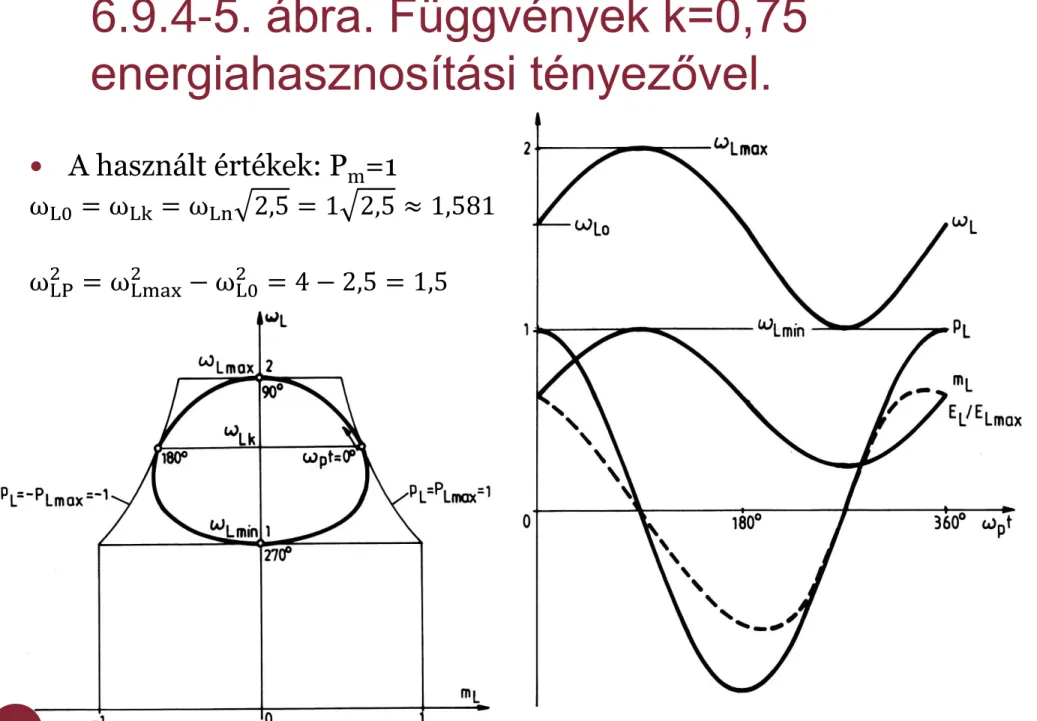
6.9.4-5. ábra. Függvények k=0,75 energiahasznosítási tényezővel.
8
A használt értékek: Pm=1
ωL0 = ωLk = ωLn 2,5 = 1 2,5 ≈ 1,581 ωLP2 = ωLmax2 − ωL02 = 4 − 2,5 = 1,5
Az első periódusban az L szögsebesség maximuma pt=90°-nál van. Ez maximálisan Lmax lehet. A (6.11) egyenletből helyettesítéssel,
összefüggést kapunk a teljesítménylüktetés megengedett amplitúdója és körfrekvenciája között, arra az esetre, amikor a teljes szögsebesség
változási tartományt kihasználjuk:
ωP ≥ kE2Pm
Lmax= 2PkEm(1−k)
Lmin (6.13)
6.9.6. ábra. Teljesítmény lüktetés amplitúdó és frekvencia
korlátai k függvényében.
6.9.2. Lendítőkerekes
energiatárolók korszerű hajtásai
10
Az 6.9.1.a. ábra szerint felépített lendítőkerekes hajtások korszerű változataiban
TE teljesítményelektronikaként frekvenciaváltót, VG villamosgépként
kalickás rövidrezárt forgórészű aszinkrongépet,
állandómágneses forgórészű szinuszmezős szinkrongépet és csúszógyűrűs forgórészű kétoldalról táplált
aszikrongépet alkalmaznak.
Ennek megfelelően a következőkben csak ezzel a három változattal
6.9.2.1. Kalickás forgórészű
aszinkrongépes lendítőkerék hajtás
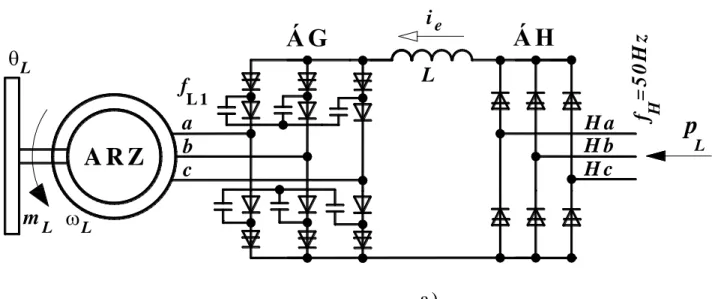
6.9.7. ábra.
a) Áraminverteres megoldás,
m
H
H c H b H a f f
Á G Á H
p
L
L L
A R Z
=50Hz
L
i L
e
a) a
b c
L 1
12
b) Feszültséginverteres megoldás.
Ez a változat képes az 6.9.1.b. ábrán szemléltetett üzemi tartomány mezőgyengítéses átfogására. AZ ÁG-ből és ÁH-ból álló
teljesítményelektronikát az 6.9.1.b. ábra 2 jelű pontjának megfelelően PLn=MLnLn=PLmax teljesítményre kell
méretezni. Ez egyben az ARZ rövidrezárt aszinkrongép névleges teljesítménye is.
L
L
fL 1
m
a b
c C ue
H a H b
A R Z H c
Á G Á H
=50Hzf H
b )
p
L
L
6.9.2.2. Állandómágneses forgórészű
szinuszmezős szinkrongépes lendítőkerék hajtás
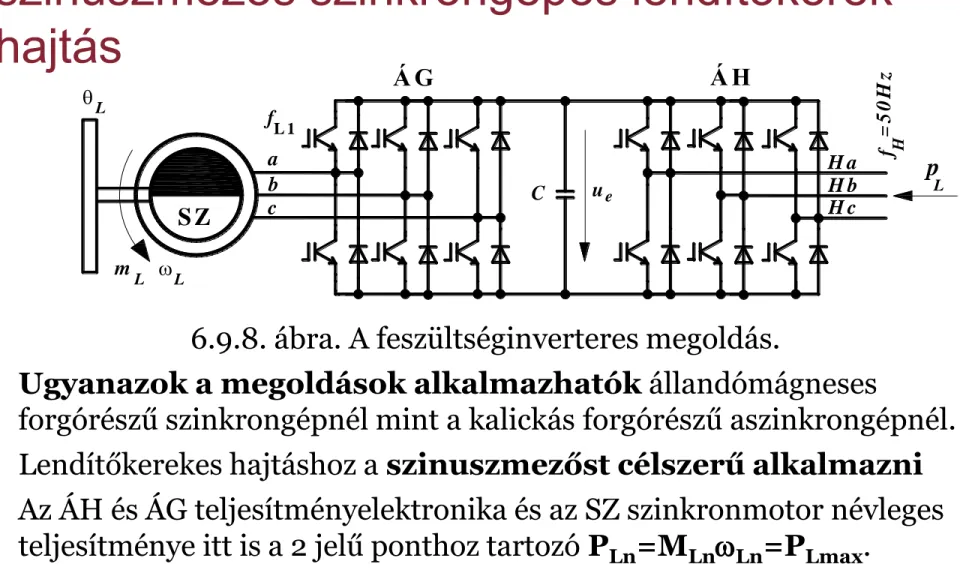
6.9.8. ábra. A feszültséginverteres megoldás.
Ugyanazok a megoldások alkalmazhatók állandómágneses
forgórészű szinkrongépnél mint a kalickás forgórészű aszinkrongépnél.
Lendítőkerekes hajtáshoz a szinuszmezőst célszerű alkalmazni
Az ÁH és ÁG teljesítményelektronika és az SZ szinkronmotor névleges teljesítménye itt is a 2 jelű ponthoz tartozó PLn=MLnLn=PLmax.
L
L
fL 1
m
a b
c C ue
H a H b H c
Á G Á H
=50Hzf H
pL
S Z
L
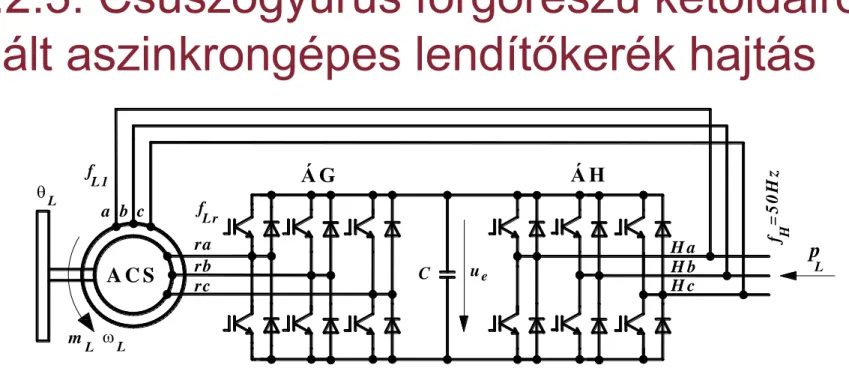
6.9.2.3. Csúszógyűrűs forgórészű kétoldalról táplált aszinkrongépes lendítőkerék hajtás
14
6.9.9. ábra. A feszültséginverteres modern megoldás.
Az állórészt közvetlenül kapcsolják a hálózatra (fL1=fH=50Hz), a
forgórészt pedig feszültséginverteren keresztül kapcsolják ugyanarra a hálózatra. Ezáltal az fLr forgórészköri frekvencia, illetve a fordulatszám változtatható:
nL=(fL1fLr)/p* (6.14)
L
L
fL r
m
ra rb
rc C ue
H a H b H c
Á G Á H
=50Hzf H
p
L
a b c fL 1
A C S
L
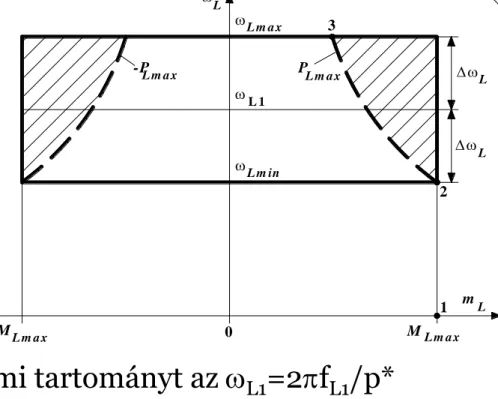
6.9.10. ábra. Üzemi
tartomány kétoldalról táplált aszinkrongépnél.
k=0,75-höz
L=
L1/3,
Lmax=(4/3)
L1,
Lmin=(2/3)
L1.
A veszteségeket elhanyagolva az üzemi tartományt az L1=2fL1/p*
szinkron szögsebességre szimmetrikusan célszerű felvenni:
Lmax=L1+L, Lmin=L1L. Ekkor az energiahasznosítási tényező:
A teljes szögsebesség tartományban képes MLmax hajtó (töltő) és –MLmax fékező (kisütő) nyomatékra. Ha a teljesítményt PLmaxPLPLmax=MLmaxLmin szerint korlátozzuk, akkor a szaggatott tartományokban nem üzemel a hajtás.
Az aszinkrongép névleges nyomatéka MAn=MLmax, névleges teljesítménye P M =P /( ). A teljesítményelektronikán csak a
L m a x
L 1
L m in L
-PL m a x PL m a x
3
2
1
-ML m a x 0 ML m a x
mL L
L
2 L
L /(1 )
4
k
6.9.2.4. Egyenkörre csatlakozó lendítőkerék hajtás
16
6.9.11. ábra
A teljesítménylüktetés kompenzációja a közbülső egyenkörben is elvégezhető.
Egyforma nagyságú közbülső körű egyenfeszültséget választva a
szélgenerátor hajtás és a lendítőkerekes hajtás hálózati áramirányítói összevonhatók.
A közös ÁH hálózati áramirányítón már lüktetésmentes pGk közepes teljesítmény áramlik át.
1
Á L G
L A L
L c
L b L a
L
L 1
H
p
H
H c
pG
iC
i i
i
eG eH
eL
p
L
H b H a
f f f
ue
C
Á G Á H
c b a
S Z G
v
6.9.3. Lendítőkerekes energiatároló hajtások korszerű szabályozási
módszerei
6.9.12. ábra
Bármely villamosgépekhez és a háromfázisú hálózathoz teljesen
megegyező, feszültséginverter kapcsolású áramirányítók csatlakoznak.
Ennek megfelelően a legbelső szabályozási hurokban lévő közvetlen vagy közvetett áramvektor szabályozások is
hasonlóak.
G a G b G c
H a H b
V G H c
Á G Á H
H álózat
va , vb , vc va , vb , vc Á ram vektor
szabályozás
Á ram vektor szabályozás
6.9.4. Teljesítmény lüktetés szabályozása
6.9.4.1. Teljesítmény lüktetés szabályozásának megvalósítása
18
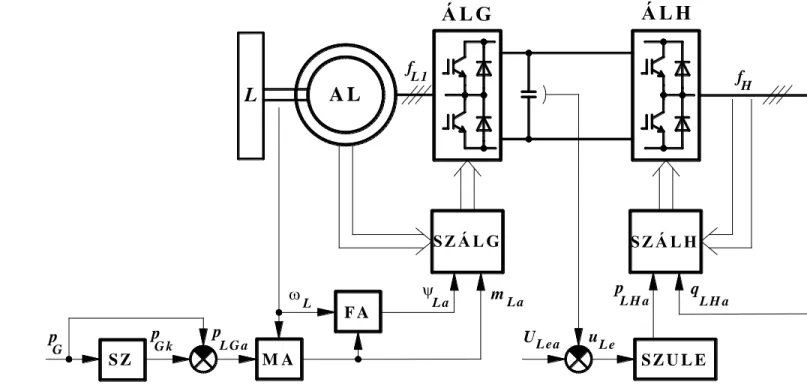
6.9.13. ábra. Háromfázisú hálózatra csatlakozó kalickás aszinkrongépes lendítőkerekes hajtás szabályozókörének a blokkvázlata.
fL 1
A L
Á L G Á L H
SZ Á L G SZ Á L H
F A
S Z M A S Z U L E
fH
p p p
p
G G k L G a
L H a
L
L a m
L a
UL ea uL e
qL H a
L
A lüktető villamos teljesítmény mért pG pillanatértékéből az SZ szűrő előállítja a pGk középértéket és e két teljesítmény különbsége adja a lendítőkerekes hajtás pLGa villamos teljesítményének az
alapjelét:
pLGa=pGkpG. (6.31)
A pLGa-ból és az L lendítőkerék szögsebességből nyomaték alapjelet állít elő az MA egység:
mLa=(pLGapLv)/L, ha Lmin<L<Lmax, (6.32a)
mLa=mLv, ha LLmin, vagy LLmax. (6.32b)
Az L és az mLa jelekből az FA egység meghatározza az AL kalickás aszinkrongép fluxusának a La alapjelét. A gépoldali SZÁLG
szabályozó, az ÁLG áramirányítón keresztül, végzi az AL aszinkrongép nyomatékának és fluxusának a szabályozását.
A szabályozás történhet mezőorientált áramvektor szabályozással (ekkor La az AL rotorfluxusának az alapjele), vagy közvetlen nyomaték és fluxus szabályozással (ekkor La az AL állórészfluxusának az
alapjele).
20
A hálózatoldali SZULE feszültségszabályozó az uLe
egyenfeszültséget szabályozza az általa előírt pLHa hatásos teljesítmény alapjellel.
A SZULE feszültségszabályozó azt biztosítja, hogy a közbülsőköri CL
kondenzátor uLe feszültsége és (1/2)CL energiája állandó maradjon, azaz ne torlódjon fel energia a közbülső egyenáramú körben.
A qLHa meddő teljesítmény alapjelet külső, hálózati igények szabják meg.
Az SZÁLH szabályozó, az ÁLH áramirányítón keresztül, végzi a
lendítőkerekes hajtás villamos hatásos és meddő teljesítményének a szabályozását.
A szabályozás történhet hálózatorientált áramvektor szabályozással, vagy közvetlen hatásos és meddő teljesítmény szabályozással.
A kalickás aszinkrongépes lendítőkerekes energiatároló hajtás ezzel az erősáramú és szabályozó körrel minden fajta lüktető teljesítmény
kompenzálására alkalmazható.
Hasonló felépítésű az állandómágneses szinkrongépes lendítőkerék hajtás.
A kétoldalról táplált aszinkrongépes lendítőkerék hajtás blokkvázlata annyiban eltérő, hogy ott mezőgyengítés nem lehetséges.
6.9.14.ábra. Állandómágneses szélgenerátor egyenkörére csatlakozó lendítőkerekes hajtás szabályozókörének a blokkvázlata.
G a G
K S Z V S Z
a
S Z G
v p
G
i i
i
eG e H
e L
L
fL 1
A L
Á L G
SZ Á L G
F A
S Z M A
p p p
G G k L G a
L
L a mL a
SZ Á G
Á G
f1
qH a ue
Uea
pH a
fH
S Z U E SZ Á H
Á H
pL pG m érő
S Z N mG a
n n
22
A lendítőkerék hajtás ÁLG gépoldali áramirányítójának a szabályozása most is ugyanúgy történik mint a 6.9.13. ábrán.
A generátor hajtás és a lendítőkerék hajtás közös ÁH hálózati áramirányítóját úgy kell szabályozni mint a 6.9.13. ábrán az ÁLH áramirányítót.
A különbség csupán annyi, hogy most az ÁH áramirányítón a
pG+pLpH eredő teljesítmény áramlik át. Ennek megfelelően az SZUE feszültség szabályozó pHapGk hatásos teljesítmény alapjelet állít be.
A lendítőkerekes energiatároló hajtás ezzel az erősáramú és szabályozó körrel akkor alkalmazható, ha a lüktető teljesítmény forrása (pl. a
szélgenerátor) közbülső egyenáramú körös frekvenciaváltós hajtással rendelkezik.
Ebben az esetben is mutatkozhatnak problémák, például a kétoldalról táplált aszinkrongépnél a teljesítmények a körülményes mérése miatt.
Ha a lüktető teljesítményforrás teljesítményelektronikája a 6.9.14.
ábrán látható állandómágneses szélgenerátorral megegyező felépítésű, akkor a lüktető pG teljesítmény az ÁG áramirányító
egyenáramú oldalán pG=ueieG szerint egyszerűen számítható és mérhető.
6.9.4.2. Teljesítmény lüktetés
szabályozásának szimulációja (MATLAB Simulink)
Példaként a 6.9.13. ábrán bemutatott rendszer szimulációjának vizsgálatát mutatjuk be (AL).
Egyszerűsítések:
A lüktető teljesítmény forrásaként szélgenerátort tételeztünk fel.
A szélgenerátort a lüktető pG teljesítményével vettünk figyelembe.
A feszültséginverter kapcsolású, ISZM vezérlésű áramirányítókat szabályozható amplitúdójú és frekvenciájú szinuszos feszültség forrásokkal modelleztük.
A kalickás aszinkron gép (AL), a hálózat, a mechanikai rész és az egyenkör pontos állapotegyenleteivel szerepel a modellben.
A szimulációban termelői pozitív irányokkal dolgoztunk, így a hálózatba adott (a lendítőkereket kisütő) pL teljesítmény lett pozitív előjelű.
A vizsgált folyamat:
24
A lendítőkerék Lk=1,581pu szögsebességgel forog (6.9.8.b), k=0,75.
A szélgenerátor pGk közepes teljesítményéhez egy állandó PG amplitúdójú és Tp periódus idejű szinuszos turbulens lüktetést injektálunk. Ennek megfelelően a szélgenerátor teljesítménye:
pG=pGk+pG.
A pG teljesítménylüktetés különböző fázishelyzetében kezdjük el a lendítőkerekes energiatárolóval a lüktetés kompenzálását
(pLGa=pG).
A rendszer paramétereit a következőkre állítottuk, összhangban az elméleti vizsgálatokkal és a célul kitűzött kompenzálási
tartományokkal:
Tp=1min=18850pu.; k=0,75 (Lmin=1pu, Lmax=2pu); PGk=1pu a legtöbb esetben; TVGin=1s=314pu; C=7; TLin=7*314=2198pu (így a (6.7) szerinti
T=10,5s, ami kisebb mint 1min, de a pL a folyamatok alatt többségében így is messze van a PLmax=1pu értéktől).
6.9.4.2.1. Tökéletes kompenzáció
Ha a rendszer nem éri el korlátait, a kompenzáció tökéletes.
Ehhez kicsi lüktetési amplitúdó szükséges: PG=0,4-re lett választva. A számítási idő 40000pu.
A kompenzáció kezdete a pG negatív maximumánál (t=(3/4)Tp=14138-nál) van. Az így kialakuló szimmetrikus kisütési-töltési periódusok L középértékét és a kompenzálási tartalékot változatlanul, a kiindulási optimális értéken
hagyják. Jól látszik a mezőgyengítés (6.9.24a,d. ábrák).
6.9.15. ábra (1). Tökéletes kompenzáció.
26
0 0.2 0.4 0.6 0.8
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3
idiq
d q
a)
0 1 2 3 4
x 104 -0.5
0 0.5 1 1.5 2
pmw
b)
0 1 2 3 4
x 104 -0.5
0 0.5 1 1.5
p
c)
0 1 2 3 4
x 104 0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
pszir
d)
iAL
L
mL
t [104 pu]
t [104 pu]
pL pG+pL
t [104 pu]
r
6.9.15. ábra (2). A folyamat időbeli lefolyása
(klikk a képre)0 0.2 0.4 0.6 0.8
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3
idiq
d q
a)
0 1 2 3 4
x 104 -0.5
0 0.5 1 1.5 2
pmw
b)
0 1 2 3 4
-0.5 0 0.5 1 1.5
p
0 1 2 3 4
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
pszir
iAL
L
mL
t [104 pu]
t [104 pu]
pL pG+pL
t [104 pu]
r
6.9.4.2.2. Lüktető komponens fázishelyzetének hatása 6.9.16. ábra
28
0 1 2 3 4
x 104 -0.5
0 0.5 1 1.5 2
pmw
a)
0 1 2 3 4
x 104 -0.5
0 0.5 1 1.5
b)
mL
L
t [104 pu]
pG+pL
pL
t [104 pu]
a. AL aszinkrongép nyomatéka és szögsebessége,
b. Lendkerék pL teljesítménye és a pG+pL eredő teljesítmény.
6.9.4.2.3. Fordulatszám korlátozások periódikusan 6.9.17. ábra (1)
-0.2 0 0.2 0.4 0.6 0.8 1
-0.6 -0.4 -0.2 0 0.2 0.4
idiq
d q
1 2
3 4 5
6
7
a)
0 1 2 3 4 5
x 104 -1
-0.5 0 0.5 1 1.5 2 2.5
pmw
1
2 3
4 5
6 7
b)
0 1 2 3 4 5
-1 -0.5 0 0.5 1 1.5 2
p
1 2
3
4 5
6 7
0 1 2 3 4 5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
1 2
3
4
5 6
7
iAL
L
mL
t [104 pu]
t [104 pu]
pL
pG+pL
r
t [104 pu]
6.9.17. ábra (2) A folyamat időbeli lefolyása
(klikk a képre)30
-0.2 0 0.2 0.4 0.6 0.8 1
-0.6 -0.4 -0.2 0 0.2 0.4
idiq
d q
1 2
3 4 5
6
7
a)
0 1 2 3 4 5
x 104 -1
-0.5 0 0.5 1 1.5 2 2.5
pmw
1
2 3
4 5
6 7
b)
0 1 2 3 4 5
x 104 -1
-0.5 0 0.5 1 1.5 2
p
1 2
3
4 5
6 7
c)
0 1 2 3 4 5
x 104 0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
1 2
3
4
5 6
7
d)
iAL
L
mL
t [104 pu]
t [104 pu]
pL
pG+pL
r
t [104 pu]
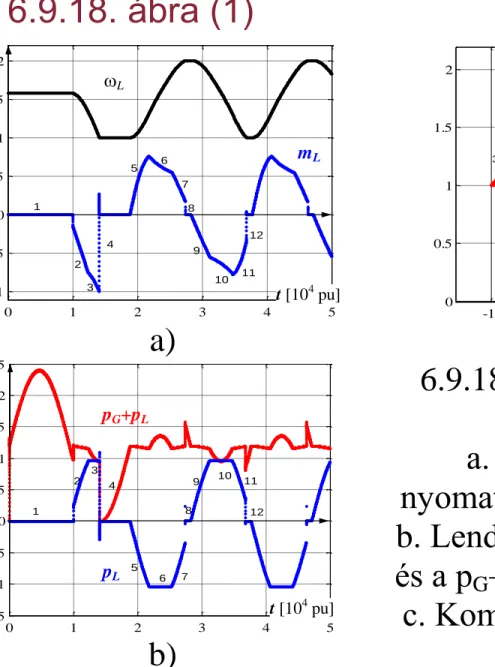
6.9.4.2.4. Összes korlát elérése 6.9.18. ábra (1)
0 1 2 3 4 5
x 104 -1
-0.5 0 0.5 1 1.5 2
1
2 3
4
5 6 7
8
9
10 11 12
a)
-1 -0.5 0 0.5 1
0 0.5 1 1.5 2
1 2 3
4
5 6 8 7
9
10
11 12
c)
0 1 2 3 4 5
-1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
p
1 2
3 4
5
6 7 8
9 10 11 12
6.9.18. ábra. Összes korlát elérése.
a. AL aszinkrongép
nyomatéka és szögsebessége, b. Lendkerék p
Lteljesítménye és a p
G+p
Leredő teljesítmény, c. Kompenzálási folyamat az
L
mL
t [104 pu]
t [104 pu]
pL pG+pL
L
mL
6.9.18. ábra (2) A folyamat időbeli lefolyása
(klikk a képre)32
0 1 2 3 4 5
x 104 -1
-0.5 0 0.5 1 1.5 2
1
2 3
4
5 6 7
8
9
10 11 12
a)
-1 -0.5 0 0.5 1
0 0.5 1 1.5 2
1 2 3
4
5 6 8 7
9
10
11 12
c)
0 1 2 3 4 5
x 104 -1.5
-1 -0.5 0 0.5 1 1.5 2 2.5
p
1 2
3 4
5
6 7 8
9 10 11 12
b)
6.9.18. ábra. Összes korlát elérése.
a. AL aszinkrongép
nyomatéka és szögsebessége, b. Lendkerék p
Lteljesítménye és a p
G+p
Leredő teljesítmény, c. Kompenzálási folyamat az
L-m
Lsíkon.
L
mL
t [104 pu]
t [104 pu]
pL pG+pL
L
mL
A villamos gép veszteségeinek kompenzálása 6.9.18. ábra
0 1 2 3 4 5
x 104 -1
-0.5 0 0.5 1 1.5 2
a)
0 1 2 3 4 5
x 104 -1.5
-1 -0.5 0 0.5 1 1.5 2 2.5
p
b)
L
mL
t [104 pu]
pG+pL
t [104 pu]
pL
a. AL aszinkrongép nyomatéka és szögsebessége,
b. Lendkerék pL teljesítménye és a pG+pL eredő teljesítmény.